Download as pdf or txt
You might also like
- LCR CircuitDocument14 pagesLCR CircuitCOSM-OS50% (2)
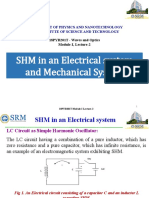
- SHM in An Electrical System and Mechanical SystemDocument12 pagesSHM in An Electrical System and Mechanical Systemvenkateswaran k.sNo ratings yet
- Simple Harmonic Motion: Department of Physics and Nanotechnology SRM Institute of Science and TechnologyDocument16 pagesSimple Harmonic Motion: Department of Physics and Nanotechnology SRM Institute of Science and Technologyvenkateswaran k.sNo ratings yet
- 2.4 Electromechanical RelaysDocument8 pages2.4 Electromechanical Relaysmuez zabenNo ratings yet
- Base (Reference) PaperDocument7 pagesBase (Reference) Papermphaniteja2012No ratings yet
- Fundamentals of Power Systems PDFDocument13 pagesFundamentals of Power Systems PDFSurender ReddyNo ratings yet
- Oscillations - WavesDocument29 pagesOscillations - WavesradhjasraNo ratings yet
- Resonant Circuits and Mutual Inductances: + V R L CDocument5 pagesResonant Circuits and Mutual Inductances: + V R L CKodali JayachandraNo ratings yet
- Time Dependent Currents in RC CircuitsDocument20 pagesTime Dependent Currents in RC Circuitsmurali_j17No ratings yet
- Electromagnetic Oscillations and Alternating Current: in This Chapter We Will Cover The Following TopicsDocument31 pagesElectromagnetic Oscillations and Alternating Current: in This Chapter We Will Cover The Following Topicsnadir9999No ratings yet
- Emi AcDocument13 pagesEmi AcAnonymous BOreSFNo ratings yet
- 10 InductanceDocument16 pages10 InductanceAde Nur HidayatNo ratings yet
- Simulado - 2 IPhODocument12 pagesSimulado - 2 IPhOleonardo sathlerNo ratings yet
- Small Signal Modeling and Analysis of Synchronverters: Zhou Wei, Chen Jie and Gong ChunyingDocument5 pagesSmall Signal Modeling and Analysis of Synchronverters: Zhou Wei, Chen Jie and Gong ChunyingEnimien AymenNo ratings yet
- Balancing Compensation of Unbalanced Load Based On Single PhaseDocument5 pagesBalancing Compensation of Unbalanced Load Based On Single PhaseRahul YadavNo ratings yet
- A High Efficiency Low Cost Direct Battery BalancingDocument6 pagesA High Efficiency Low Cost Direct Battery BalancingkonikakaNo ratings yet
- The Determination On DC Capacitor Parameter in Active Power FilterDocument4 pagesThe Determination On DC Capacitor Parameter in Active Power FilterSudheer KakaniNo ratings yet
- ChapterDocument26 pagesChapterdvdmega0% (1)
- Impedance, Angular Velocities & Frequencies of Oscillating CurrentsDocument32 pagesImpedance, Angular Velocities & Frequencies of Oscillating CurrentselectrosciNo ratings yet
- A Bidirectional Moving Field Inductive Power Transfer System For Electric VehiclesDocument4 pagesA Bidirectional Moving Field Inductive Power Transfer System For Electric VehiclesraifkaraahmetogluNo ratings yet
- Lecture-6-Basic System ModelsDocument23 pagesLecture-6-Basic System Modelsseifu hailemariamNo ratings yet
- Chaos Study and Parameter-Space Analysis of TheDocument13 pagesChaos Study and Parameter-Space Analysis of TheVisu TamilNo ratings yet
- Lec - 1 &2 13-14 092023Document25 pagesLec - 1 &2 13-14 092023Umair KhanNo ratings yet
- Optics - Waves - Module 01 - Lecture 01Document16 pagesOptics - Waves - Module 01 - Lecture 01Brishav K. HalderNo ratings yet
- CL-12 Chapter 4 Magnetism PhysicsDocument15 pagesCL-12 Chapter 4 Magnetism PhysicsSomila SchoolNo ratings yet
- Open Circuit and Short Circuit Tests On Single Phase Transformer 1 AimDocument7 pagesOpen Circuit and Short Circuit Tests On Single Phase Transformer 1 AimRudra SimhaNo ratings yet
- Cours Les Antigenes Sawsan Avec Modification Pour 2018Document43 pagesCours Les Antigenes Sawsan Avec Modification Pour 2018Cheikh Brahim ElkhadarNo ratings yet
- Tuning of Semiconductor Oscillators by Chaos ControlDocument5 pagesTuning of Semiconductor Oscillators by Chaos ControlDaniel CooperNo ratings yet
- Tutorial 2Document1 pageTutorial 2BNo ratings yet
- EM-2021 - Lecture-19-20Document18 pagesEM-2021 - Lecture-19-20sanjunaNo ratings yet
- Chapter 3 AC Power PDFDocument64 pagesChapter 3 AC Power PDFVievie Le BluewberrietrufflesNo ratings yet
- Electromagnetic Oscillation and Alternative Wave - Muhammad Aryaputra - 1201190308Document10 pagesElectromagnetic Oscillation and Alternative Wave - Muhammad Aryaputra - 1201190308Pockets Ain't EmptyNo ratings yet
- Methods For A Systematic Analysis of Power ConvertersDocument30 pagesMethods For A Systematic Analysis of Power ConvertersPhoenix BlazeNo ratings yet
- DC MACHINES by Dr.P.Sampath KumarDocument135 pagesDC MACHINES by Dr.P.Sampath Kumarpappula.sampatNo ratings yet
- EE254 1 IntroductionDocument47 pagesEE254 1 IntroductionClint GengosNo ratings yet
- Em Oscill ADocument12 pagesEm Oscill Aaditya66605No ratings yet
- Chapter 1Document32 pagesChapter 1Mekonnen AyalNo ratings yet
- APS Lecture-4Document20 pagesAPS Lecture-4dearlight17No ratings yet
- Generalized Symmetrical Angle PWM Technique For A.CDocument4 pagesGeneralized Symmetrical Angle PWM Technique For A.Capi-27465568No ratings yet
- Unti 4Document29 pagesUnti 4dhruvkareliya1004No ratings yet
- Fundamental of Electrical Engineering Module 1Document18 pagesFundamental of Electrical Engineering Module 1Nathan BakeNo ratings yet
- Chapter 1Document142 pagesChapter 1Cuong Hoang VietNo ratings yet
- An Introduction To The Physics and Technology of E+e-Linear CollidersDocument62 pagesAn Introduction To The Physics and Technology of E+e-Linear CollidersBeverly PamanNo ratings yet
- Power Quality Improvement Wind/Pv Hybrid System by Using ConvertersDocument6 pagesPower Quality Improvement Wind/Pv Hybrid System by Using ConvertersRahardian TristantoNo ratings yet
- 4 - Electromagnetic Induction & AC PDFDocument15 pages4 - Electromagnetic Induction & AC PDFthinkiitNo ratings yet
- EsrDocument7 pagesEsrNishan RanabhatNo ratings yet
- Parametric Amplifiers and Converters With Pumped Inductance and CapacitanceDocument5 pagesParametric Amplifiers and Converters With Pumped Inductance and CapacitanceshirtquittersNo ratings yet
- (Primary) (Secondary) : Physics 1304: Lecture 18, PG 1Document38 pages(Primary) (Secondary) : Physics 1304: Lecture 18, PG 1Sagar VermaNo ratings yet
- Resistance (R), Inductance (L), and Capacitance (C) CircuitsDocument10 pagesResistance (R), Inductance (L), and Capacitance (C) Circuitszed cozNo ratings yet
- Optics - Waves - Module 01 - Lecture 05Document11 pagesOptics - Waves - Module 01 - Lecture 05Brishav K. HalderNo ratings yet
- Emi AcDocument6 pagesEmi ActhinkiitNo ratings yet
- CH 2Document74 pagesCH 2Siraj MohammedNo ratings yet
- Lesson 28Document2 pagesLesson 28e5865domingoascotbaguioNo ratings yet
- Chapter 1-1Document15 pagesChapter 1-1eyobNo ratings yet
- E6 SolDocument29 pagesE6 SolEmuNo ratings yet
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11From EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11No ratings yet
- SS 316 03Document12 pagesSS 316 03Muhammad Asif IqbalNo ratings yet
- EC8751 Optical CommunicationDocument15 pagesEC8751 Optical CommunicationParanthaman GNo ratings yet
- Schumann ResonanceDocument5 pagesSchumann ResonanceotxottoNo ratings yet
- Seminar PresentationDocument15 pagesSeminar PresentationScience BrainsNo ratings yet
- Datasheet PDF Search Site.: Multi-Spark Cdi CircuitDocument27 pagesDatasheet PDF Search Site.: Multi-Spark Cdi CircuitMuriel MatheusNo ratings yet
- Medium Voltage Electrical Systems For Data CentersDocument28 pagesMedium Voltage Electrical Systems For Data CentersArjun EnonosNo ratings yet
- qt40 241Document28 pagesqt40 241ykuscuNo ratings yet
- Satronic BoxDocument6 pagesSatronic BoxbethmongNo ratings yet
- EMI Class Notes Assignment 1Document2 pagesEMI Class Notes Assignment 1Praneshvar Praneshvar50% (2)
- SL1 White RAL9016 Searchlight LEDDocument2 pagesSL1 White RAL9016 Searchlight LEDbjorn.renders.71No ratings yet
- 03 - Motor Protection RelaysDocument18 pages03 - Motor Protection RelaysMermillon JulienNo ratings yet
- Dynamics of Uniform Circular Motion3Document8 pagesDynamics of Uniform Circular Motion3Bry RamosNo ratings yet
- Mech Auto Elec Electrnx.170160916Document14 pagesMech Auto Elec Electrnx.170160916swami061009No ratings yet
- Brochure 150601 Newest TesproDocument8 pagesBrochure 150601 Newest Tesprogurky33No ratings yet
- Sa-Csir, Sa-Cscr: Installation and Operating InstructionsDocument16 pagesSa-Csir, Sa-Cscr: Installation and Operating Instructionssushant moreyNo ratings yet
- Zahra-WE n3289777 v2 RATING OF HIGH VOLTAGE CABLES LECTURE NOTES-CURTIN UNIVERSITY OF TECHNOLOGYDocument47 pagesZahra-WE n3289777 v2 RATING OF HIGH VOLTAGE CABLES LECTURE NOTES-CURTIN UNIVERSITY OF TECHNOLOGYYvonne TohNo ratings yet
- Crystal Optics With Allowance For Spatial Dispersion Exciton Theory. IIDocument37 pagesCrystal Optics With Allowance For Spatial Dispersion Exciton Theory. IIbrian delgado de lucioNo ratings yet
- 307D, 311D, 312D, 315D, 319D, 320D, 323D, M313D, M315D, M316D, M318D, and M322D Excavators Ai R Conditioning Electrical SystemDocument2 pages307D, 311D, 312D, 315D, 319D, 320D, 323D, M313D, M315D, M316D, M318D, and M322D Excavators Ai R Conditioning Electrical SystemDed Ivanovich0% (1)
- Lighting Presentation PDFDocument62 pagesLighting Presentation PDFsunil kumarNo ratings yet
- Tentative: IPS Alpha Technology, LTDDocument19 pagesTentative: IPS Alpha Technology, LTDSetiawan Abdul RochimNo ratings yet
- The Language of LightDocument27 pagesThe Language of LightmradojcinNo ratings yet
- Science: Quarter 2 - Module 6 Electromagnetism in Everyday LifeDocument68 pagesScience: Quarter 2 - Module 6 Electromagnetism in Everyday LifeJacob Dy67% (3)
- Efw216b - Unit 2 Electric and Magnetic FieldsDocument112 pagesEfw216b - Unit 2 Electric and Magnetic FieldsmwembobasaseNo ratings yet
- Surefire 6PDocument2 pagesSurefire 6PArmySGTNo ratings yet
- 1 Mark MCQ With Answer PC-EE-401Document5 pages1 Mark MCQ With Answer PC-EE-401Sanjoy PathakNo ratings yet
- Matter Waves: by A. Rekha Reddy 21311A1953 ECMDocument15 pagesMatter Waves: by A. Rekha Reddy 21311A1953 ECMSirishaNo ratings yet
- Surp Sawyer Jacob Presentation 1Document15 pagesSurp Sawyer Jacob Presentation 1api-632292770No ratings yet
- Single Phase Semi ConverterDocument18 pagesSingle Phase Semi Convertermohamed enanyNo ratings yet
- USM ReportDocument21 pagesUSM ReportChandrakant SaurabhNo ratings yet