
542 PP
542 PP
You might also like
- TP U1Document13 pagesTP U1Vignesh KNo ratings yet
- Thermodynamics ProblemsDocument1 pageThermodynamics ProblemsTots HolaresNo ratings yet
- Must InverterDocument36 pagesMust InverterBradNo ratings yet
- TP Unit IDocument22 pagesTP Unit IPraveen PraveenNo ratings yet
- Navier Stokes EquationsDocument17 pagesNavier Stokes EquationsAlice LewisNo ratings yet
- Differential Relations For A Fluid ParticleDocument34 pagesDifferential Relations For A Fluid ParticleTusanita MapuolaNo ratings yet
- Anna University Examinations, Dec. 2014 B.Tech - Chemical Engineering Ch2402 - Transport PhenomenaDocument18 pagesAnna University Examinations, Dec. 2014 B.Tech - Chemical Engineering Ch2402 - Transport Phenomenajeevanantham 5846No ratings yet
- Artificial Viscosity HansteenDocument10 pagesArtificial Viscosity HansteenChandan Kumar SidhantNo ratings yet
- Unit 2 Fluid Dynamics:: Dr. Naveen G Patil Assistant Professor Ajeenkya Dy Patil UniversityDocument85 pagesUnit 2 Fluid Dynamics:: Dr. Naveen G Patil Assistant Professor Ajeenkya Dy Patil UniversityShreeyash JadhavNo ratings yet
- Transport PhenomenaDocument8 pagesTransport PhenomenaShivaniNo ratings yet
- QB TPDocument24 pagesQB TP3004 Divya Dharshini. MNo ratings yet
- FlnotesDocument165 pagesFlnotesRodrigo GarcíaNo ratings yet
- Laminar Flow: N/3 Molecules Moving in Y-Direction, Assume That N/6 Move Upwards and N/6 Move DownwardsDocument20 pagesLaminar Flow: N/3 Molecules Moving in Y-Direction, Assume That N/6 Move Upwards and N/6 Move DownwardsSharad Patel LodhiNo ratings yet
- TP QBDocument27 pagesTP QBjelike5485No ratings yet
- Fluid Dynamics LecturesDocument171 pagesFluid Dynamics LecturesstanculeanuNo ratings yet
- Hapter 2:-: Potential FlowDocument19 pagesHapter 2:-: Potential FlowAhmed YassenNo ratings yet
- Lecture2 3Document28 pagesLecture2 3Augustine EzeNo ratings yet
- Nash Notes On FluidsDocument75 pagesNash Notes On FluidsAnonymous 9rJe2lOskxNo ratings yet
- 02 Momentum Transfer and Viscous FlowDocument58 pages02 Momentum Transfer and Viscous FlowM PedrosoNo ratings yet
- Notes On Fluids CingalaDocument75 pagesNotes On Fluids Cingalaartimus_2kNo ratings yet
- Fluid Mechanics: Uday Singh M.SC Physics Roll No-165100592 Uday - Singh@iitgn - Ac.in 18 March, 2017Document6 pagesFluid Mechanics: Uday Singh M.SC Physics Roll No-165100592 Uday - Singh@iitgn - Ac.in 18 March, 2017uday singhNo ratings yet
- Description of Fluid Motion: 2.1 Approaches and Basis Concepts 2.1.1 Microscopic View and Macroscopic ViewDocument17 pagesDescription of Fluid Motion: 2.1 Approaches and Basis Concepts 2.1.1 Microscopic View and Macroscopic ViewDivyansh RathiNo ratings yet
- Two Marks Questions & Answers Unit I: Fluid Properties and Fluid StaticsDocument25 pagesTwo Marks Questions & Answers Unit I: Fluid Properties and Fluid StaticsjvinothupendraNo ratings yet
- Fluids 2022 Fluids-BasicsDocument16 pagesFluids 2022 Fluids-Basics16 Malola KrishnanNo ratings yet
- Rate of Flow or DischargeDocument6 pagesRate of Flow or DischargeEuchariaNo ratings yet
- Chapter-3 Fluid DynamicsDocument51 pagesChapter-3 Fluid DynamicsS.M Umer SiddiquiNo ratings yet
- Basic Concepts and Properties of FluidsDocument18 pagesBasic Concepts and Properties of Fluids9444583008100% (1)
- Fluid MechanicsDocument5 pagesFluid MechanicsAkash SoniNo ratings yet
- Lec 1 - 2 Fluid Mechanics - IntroductionDocument30 pagesLec 1 - 2 Fluid Mechanics - Introductionshamiul himelNo ratings yet
- Chapter C1-2 (Student)Document67 pagesChapter C1-2 (Student)Kevin AlexNo ratings yet
- The Differential Equations of FlowDocument12 pagesThe Differential Equations of Flowsundari_muraliNo ratings yet
- Fluid StaticsDocument79 pagesFluid Staticsmahirtanjim50No ratings yet
- 2019/2020 MECH2414 Thermofluids PART 2 - Fluids Yuguo Li: Chapter 1 Introduction To Fluid MechanicsDocument22 pages2019/2020 MECH2414 Thermofluids PART 2 - Fluids Yuguo Li: Chapter 1 Introduction To Fluid MechanicsLeo WongNo ratings yet
- Derivation of Continuity EquationDocument11 pagesDerivation of Continuity EquationManish ShahNo ratings yet
- Viscosity: DSC 1D (GE T4) Waves and OpticsDocument6 pagesViscosity: DSC 1D (GE T4) Waves and OpticsFavourite MoviesNo ratings yet
- EMR 2325 Fluid Mechanics II Part1Document29 pagesEMR 2325 Fluid Mechanics II Part1queenmutheu01No ratings yet
- Lecture2 - CFD - Course - Governing Equations (Compatibility Mode) PDFDocument132 pagesLecture2 - CFD - Course - Governing Equations (Compatibility Mode) PDFvibhor28No ratings yet
- Governing Equations and Boundary ConditionsDocument59 pagesGoverning Equations and Boundary ConditionsRahis Pal SinghNo ratings yet
- Natural Modes of The Two-Fluid Model of Two-PhaseDocument17 pagesNatural Modes of The Two-Fluid Model of Two-PhasecleuberNo ratings yet
- Chapter3 Fluid DynamicsDocument38 pagesChapter3 Fluid DynamicsJason RossNo ratings yet
- Lecture 3 - Conservation Equations Applied Computational Fluid DynamicsDocument33 pagesLecture 3 - Conservation Equations Applied Computational Fluid DynamicsPragadeesh MohanNo ratings yet
- L-7 Fluid MechanicsDocument6 pagesL-7 Fluid Mechanicspinku kumarNo ratings yet
- ReefDocument33 pagesReeframmogan_mNo ratings yet
- Chapter One Basic Concepts From Fluid Dynamics and Thermodynamics 1.1 Definitions - Gas DynamicsDocument5 pagesChapter One Basic Concepts From Fluid Dynamics and Thermodynamics 1.1 Definitions - Gas DynamicsHaider SalmanNo ratings yet
- FLUID MECHANICS - Module I (5 Files Merged)Document218 pagesFLUID MECHANICS - Module I (5 Files Merged)nithinvsNo ratings yet
- Navier Stokes EquationDocument20 pagesNavier Stokes EquationNaveen SapareNo ratings yet
- Hydraulic Engineering Lab VIVA VOCEDocument14 pagesHydraulic Engineering Lab VIVA VOCEMohan Ganesh71% (7)
- CH-1 Properties of Fluids: at Rest or in MotionDocument15 pagesCH-1 Properties of Fluids: at Rest or in MotionDev KaharNo ratings yet
- Fluid Dynamics Lecture IDocument15 pagesFluid Dynamics Lecture ISuta VijayaNo ratings yet
- Chapter 1 GeneralitiesDocument24 pagesChapter 1 GeneralitiesPuwa CalvinNo ratings yet
- Fluid MechanicsDocument41 pagesFluid MechanicsRian SteveNo ratings yet
- Me2204 Fluid Mechanics and Machinery 3 1 0 4Document33 pagesMe2204 Fluid Mechanics and Machinery 3 1 0 4rammogan_mNo ratings yet
- Chapter One: Fundamental Concepts inDocument29 pagesChapter One: Fundamental Concepts inNizar AliNo ratings yet
- Fluid Mechanics: Differential Relations of Fluid FlowDocument25 pagesFluid Mechanics: Differential Relations of Fluid Flowjsrajoyd_224488661No ratings yet
- ME 6123 Mechanics of Inviscid Incompressible Fluid: - Dr. A.B.M. Toufique HasanDocument14 pagesME 6123 Mechanics of Inviscid Incompressible Fluid: - Dr. A.B.M. Toufique HasanAdnan Shahariar AnikNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- 9 Class Guess Paper-2022 Physics.: Unit No. 1 Physical Quantities and Measurement. Short QuestionsDocument3 pages9 Class Guess Paper-2022 Physics.: Unit No. 1 Physical Quantities and Measurement. Short QuestionsAtiq KhanNo ratings yet
- Chapter2 ModuleDocument133 pagesChapter2 ModulePauling ChiaNo ratings yet
- Trafo Erection and MAINTENANCEDocument23 pagesTrafo Erection and MAINTENANCEgm29No ratings yet
- PD50-01 Engine Data SheetDocument10 pagesPD50-01 Engine Data SheetManuela AsmatNo ratings yet
- Torque Motors: Direct TechnologyDocument16 pagesTorque Motors: Direct TechnologymusafirNo ratings yet
- Schedule of Guaranteed Characteristics TrafoDocument7 pagesSchedule of Guaranteed Characteristics TrafomagycNo ratings yet
- R22 High Wall Optimax Series - tcm478-51466Document4 pagesR22 High Wall Optimax Series - tcm478-51466Ahad AbassNo ratings yet
- Convair Cv-880 and Boeing 720 B: Simulation Model For The Aircraft-Autopilot Systems inDocument43 pagesConvair Cv-880 and Boeing 720 B: Simulation Model For The Aircraft-Autopilot Systems inJosé Carlos Barros DopasoNo ratings yet
- Inverters For Grid Connected PV SystemsDocument26 pagesInverters For Grid Connected PV SystemsDeepti GuptaNo ratings yet
- HAL Placement Paper Question Paper 20197Document12 pagesHAL Placement Paper Question Paper 20197Mukesh KumarNo ratings yet
- STULZ CyberOne EC DX Engineering ManualDocument30 pagesSTULZ CyberOne EC DX Engineering ManualBùi LinhNo ratings yet
- Reyrolle Trip Circuit Supervision Relay: Catalog Reyrolle 7PJ13 Edition 2Document17 pagesReyrolle Trip Circuit Supervision Relay: Catalog Reyrolle 7PJ13 Edition 2Kuenley TiNy OndeNo ratings yet
- Ch02-Walding 4th Forces and Motion PDFDocument31 pagesCh02-Walding 4th Forces and Motion PDFJosh FlandersNo ratings yet
- Refractory Linings Under Termomechanical AspectsDocument10 pagesRefractory Linings Under Termomechanical AspectsHoras CanmanNo ratings yet
- Beams On Elastic Foundation 2Document8 pagesBeams On Elastic Foundation 2Mauricio Gomes de BarrosNo ratings yet
- Richard Becker (Auth.) - Theory of Heat-Springer Berlin Heidelberg (1967) PDFDocument393 pagesRichard Becker (Auth.) - Theory of Heat-Springer Berlin Heidelberg (1967) PDFJulian SierraNo ratings yet
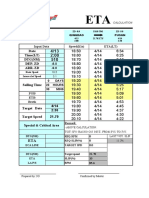
- Date Time (LT) DTG (NM) Dep. ZD Arr. ZD: Input Data Speed (KTS) Eta (LT)Document3 pagesDate Time (LT) DTG (NM) Dep. ZD Arr. ZD: Input Data Speed (KTS) Eta (LT)Myint ZawNo ratings yet
- Seo PPT 5Document13 pagesSeo PPT 5Lwin PhyoNo ratings yet
- HVAC TrainingDocument29 pagesHVAC TrainingKagitha Tirumala100% (8)
- Duct Weight EstimatingDocument16 pagesDuct Weight EstimatingfghabboonNo ratings yet
- Usat College Sagay City, Inc.: Nat'L. Highway, Brgy. Poblacion 1, Sagay City, Neg. Occ. Prelim ExamDocument5 pagesUsat College Sagay City, Inc.: Nat'L. Highway, Brgy. Poblacion 1, Sagay City, Neg. Occ. Prelim ExamJoel MilanNo ratings yet
- 1 Fundamentals of ElectrochemistryDocument74 pages1 Fundamentals of ElectrochemistryBalakrishnan Pedda GovindierNo ratings yet
- Triacs For Microwave OvenDocument8 pagesTriacs For Microwave Ovenlucjan52No ratings yet
- POWER SYSTEMS - 1 - QuestionsDocument7 pagesPOWER SYSTEMS - 1 - QuestionsB.Neelakanteshwar RaoNo ratings yet
- Cooling Tower Experiment ReportDocument5 pagesCooling Tower Experiment ReportArsyad SafaiNo ratings yet
- ME8595 QBDocument18 pagesME8595 QBHarish SekarNo ratings yet
- 19 in Game King Plus SpecsDocument7 pages19 in Game King Plus SpecsElvisNo ratings yet
- GL-13 Irrigation Pump Facilities Study and Design FGLDocument166 pagesGL-13 Irrigation Pump Facilities Study and Design FGLEphremNo ratings yet

























































































Download as pdf or txt
You might also like
- TP U1Document13 pagesTP U1Vignesh KNo ratings yet
- Thermodynamics ProblemsDocument1 pageThermodynamics ProblemsTots HolaresNo ratings yet
- Must InverterDocument36 pagesMust InverterBradNo ratings yet
- TP Unit IDocument22 pagesTP Unit IPraveen PraveenNo ratings yet
- Navier Stokes EquationsDocument17 pagesNavier Stokes EquationsAlice LewisNo ratings yet
- Differential Relations For A Fluid ParticleDocument34 pagesDifferential Relations For A Fluid ParticleTusanita MapuolaNo ratings yet
- Anna University Examinations, Dec. 2014 B.Tech - Chemical Engineering Ch2402 - Transport PhenomenaDocument18 pagesAnna University Examinations, Dec. 2014 B.Tech - Chemical Engineering Ch2402 - Transport Phenomenajeevanantham 5846No ratings yet
- Artificial Viscosity HansteenDocument10 pagesArtificial Viscosity HansteenChandan Kumar SidhantNo ratings yet
- Unit 2 Fluid Dynamics:: Dr. Naveen G Patil Assistant Professor Ajeenkya Dy Patil UniversityDocument85 pagesUnit 2 Fluid Dynamics:: Dr. Naveen G Patil Assistant Professor Ajeenkya Dy Patil UniversityShreeyash JadhavNo ratings yet
- Transport PhenomenaDocument8 pagesTransport PhenomenaShivaniNo ratings yet
- QB TPDocument24 pagesQB TP3004 Divya Dharshini. MNo ratings yet
- FlnotesDocument165 pagesFlnotesRodrigo GarcíaNo ratings yet
- Laminar Flow: N/3 Molecules Moving in Y-Direction, Assume That N/6 Move Upwards and N/6 Move DownwardsDocument20 pagesLaminar Flow: N/3 Molecules Moving in Y-Direction, Assume That N/6 Move Upwards and N/6 Move DownwardsSharad Patel LodhiNo ratings yet
- TP QBDocument27 pagesTP QBjelike5485No ratings yet
- Fluid Dynamics LecturesDocument171 pagesFluid Dynamics LecturesstanculeanuNo ratings yet
- Hapter 2:-: Potential FlowDocument19 pagesHapter 2:-: Potential FlowAhmed YassenNo ratings yet
- Lecture2 3Document28 pagesLecture2 3Augustine EzeNo ratings yet
- Nash Notes On FluidsDocument75 pagesNash Notes On FluidsAnonymous 9rJe2lOskxNo ratings yet
- 02 Momentum Transfer and Viscous FlowDocument58 pages02 Momentum Transfer and Viscous FlowM PedrosoNo ratings yet
- Notes On Fluids CingalaDocument75 pagesNotes On Fluids Cingalaartimus_2kNo ratings yet
- Fluid Mechanics: Uday Singh M.SC Physics Roll No-165100592 Uday - Singh@iitgn - Ac.in 18 March, 2017Document6 pagesFluid Mechanics: Uday Singh M.SC Physics Roll No-165100592 Uday - Singh@iitgn - Ac.in 18 March, 2017uday singhNo ratings yet
- Description of Fluid Motion: 2.1 Approaches and Basis Concepts 2.1.1 Microscopic View and Macroscopic ViewDocument17 pagesDescription of Fluid Motion: 2.1 Approaches and Basis Concepts 2.1.1 Microscopic View and Macroscopic ViewDivyansh RathiNo ratings yet
- Two Marks Questions & Answers Unit I: Fluid Properties and Fluid StaticsDocument25 pagesTwo Marks Questions & Answers Unit I: Fluid Properties and Fluid StaticsjvinothupendraNo ratings yet
- Fluids 2022 Fluids-BasicsDocument16 pagesFluids 2022 Fluids-Basics16 Malola KrishnanNo ratings yet
- Rate of Flow or DischargeDocument6 pagesRate of Flow or DischargeEuchariaNo ratings yet
- Chapter-3 Fluid DynamicsDocument51 pagesChapter-3 Fluid DynamicsS.M Umer SiddiquiNo ratings yet
- Basic Concepts and Properties of FluidsDocument18 pagesBasic Concepts and Properties of Fluids9444583008100% (1)
- Fluid MechanicsDocument5 pagesFluid MechanicsAkash SoniNo ratings yet
- Lec 1 - 2 Fluid Mechanics - IntroductionDocument30 pagesLec 1 - 2 Fluid Mechanics - Introductionshamiul himelNo ratings yet
- Chapter C1-2 (Student)Document67 pagesChapter C1-2 (Student)Kevin AlexNo ratings yet
- The Differential Equations of FlowDocument12 pagesThe Differential Equations of Flowsundari_muraliNo ratings yet
- Fluid StaticsDocument79 pagesFluid Staticsmahirtanjim50No ratings yet
- 2019/2020 MECH2414 Thermofluids PART 2 - Fluids Yuguo Li: Chapter 1 Introduction To Fluid MechanicsDocument22 pages2019/2020 MECH2414 Thermofluids PART 2 - Fluids Yuguo Li: Chapter 1 Introduction To Fluid MechanicsLeo WongNo ratings yet
- Derivation of Continuity EquationDocument11 pagesDerivation of Continuity EquationManish ShahNo ratings yet
- Viscosity: DSC 1D (GE T4) Waves and OpticsDocument6 pagesViscosity: DSC 1D (GE T4) Waves and OpticsFavourite MoviesNo ratings yet
- EMR 2325 Fluid Mechanics II Part1Document29 pagesEMR 2325 Fluid Mechanics II Part1queenmutheu01No ratings yet
- Lecture2 - CFD - Course - Governing Equations (Compatibility Mode) PDFDocument132 pagesLecture2 - CFD - Course - Governing Equations (Compatibility Mode) PDFvibhor28No ratings yet
- Governing Equations and Boundary ConditionsDocument59 pagesGoverning Equations and Boundary ConditionsRahis Pal SinghNo ratings yet
- Natural Modes of The Two-Fluid Model of Two-PhaseDocument17 pagesNatural Modes of The Two-Fluid Model of Two-PhasecleuberNo ratings yet
- Chapter3 Fluid DynamicsDocument38 pagesChapter3 Fluid DynamicsJason RossNo ratings yet
- Lecture 3 - Conservation Equations Applied Computational Fluid DynamicsDocument33 pagesLecture 3 - Conservation Equations Applied Computational Fluid DynamicsPragadeesh MohanNo ratings yet
- L-7 Fluid MechanicsDocument6 pagesL-7 Fluid Mechanicspinku kumarNo ratings yet
- ReefDocument33 pagesReeframmogan_mNo ratings yet
- Chapter One Basic Concepts From Fluid Dynamics and Thermodynamics 1.1 Definitions - Gas DynamicsDocument5 pagesChapter One Basic Concepts From Fluid Dynamics and Thermodynamics 1.1 Definitions - Gas DynamicsHaider SalmanNo ratings yet
- FLUID MECHANICS - Module I (5 Files Merged)Document218 pagesFLUID MECHANICS - Module I (5 Files Merged)nithinvsNo ratings yet
- Navier Stokes EquationDocument20 pagesNavier Stokes EquationNaveen SapareNo ratings yet
- Hydraulic Engineering Lab VIVA VOCEDocument14 pagesHydraulic Engineering Lab VIVA VOCEMohan Ganesh71% (7)
- CH-1 Properties of Fluids: at Rest or in MotionDocument15 pagesCH-1 Properties of Fluids: at Rest or in MotionDev KaharNo ratings yet
- Fluid Dynamics Lecture IDocument15 pagesFluid Dynamics Lecture ISuta VijayaNo ratings yet
- Chapter 1 GeneralitiesDocument24 pagesChapter 1 GeneralitiesPuwa CalvinNo ratings yet
- Fluid MechanicsDocument41 pagesFluid MechanicsRian SteveNo ratings yet
- Me2204 Fluid Mechanics and Machinery 3 1 0 4Document33 pagesMe2204 Fluid Mechanics and Machinery 3 1 0 4rammogan_mNo ratings yet
- Chapter One: Fundamental Concepts inDocument29 pagesChapter One: Fundamental Concepts inNizar AliNo ratings yet
- Fluid Mechanics: Differential Relations of Fluid FlowDocument25 pagesFluid Mechanics: Differential Relations of Fluid Flowjsrajoyd_224488661No ratings yet
- ME 6123 Mechanics of Inviscid Incompressible Fluid: - Dr. A.B.M. Toufique HasanDocument14 pagesME 6123 Mechanics of Inviscid Incompressible Fluid: - Dr. A.B.M. Toufique HasanAdnan Shahariar AnikNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- 9 Class Guess Paper-2022 Physics.: Unit No. 1 Physical Quantities and Measurement. Short QuestionsDocument3 pages9 Class Guess Paper-2022 Physics.: Unit No. 1 Physical Quantities and Measurement. Short QuestionsAtiq KhanNo ratings yet
- Chapter2 ModuleDocument133 pagesChapter2 ModulePauling ChiaNo ratings yet
- Trafo Erection and MAINTENANCEDocument23 pagesTrafo Erection and MAINTENANCEgm29No ratings yet
- PD50-01 Engine Data SheetDocument10 pagesPD50-01 Engine Data SheetManuela AsmatNo ratings yet
- Torque Motors: Direct TechnologyDocument16 pagesTorque Motors: Direct TechnologymusafirNo ratings yet
- Schedule of Guaranteed Characteristics TrafoDocument7 pagesSchedule of Guaranteed Characteristics TrafomagycNo ratings yet
- R22 High Wall Optimax Series - tcm478-51466Document4 pagesR22 High Wall Optimax Series - tcm478-51466Ahad AbassNo ratings yet
- Convair Cv-880 and Boeing 720 B: Simulation Model For The Aircraft-Autopilot Systems inDocument43 pagesConvair Cv-880 and Boeing 720 B: Simulation Model For The Aircraft-Autopilot Systems inJosé Carlos Barros DopasoNo ratings yet
- Inverters For Grid Connected PV SystemsDocument26 pagesInverters For Grid Connected PV SystemsDeepti GuptaNo ratings yet
- HAL Placement Paper Question Paper 20197Document12 pagesHAL Placement Paper Question Paper 20197Mukesh KumarNo ratings yet
- STULZ CyberOne EC DX Engineering ManualDocument30 pagesSTULZ CyberOne EC DX Engineering ManualBùi LinhNo ratings yet
- Reyrolle Trip Circuit Supervision Relay: Catalog Reyrolle 7PJ13 Edition 2Document17 pagesReyrolle Trip Circuit Supervision Relay: Catalog Reyrolle 7PJ13 Edition 2Kuenley TiNy OndeNo ratings yet
- Ch02-Walding 4th Forces and Motion PDFDocument31 pagesCh02-Walding 4th Forces and Motion PDFJosh FlandersNo ratings yet
- Refractory Linings Under Termomechanical AspectsDocument10 pagesRefractory Linings Under Termomechanical AspectsHoras CanmanNo ratings yet
- Beams On Elastic Foundation 2Document8 pagesBeams On Elastic Foundation 2Mauricio Gomes de BarrosNo ratings yet
- Richard Becker (Auth.) - Theory of Heat-Springer Berlin Heidelberg (1967) PDFDocument393 pagesRichard Becker (Auth.) - Theory of Heat-Springer Berlin Heidelberg (1967) PDFJulian SierraNo ratings yet
- Date Time (LT) DTG (NM) Dep. ZD Arr. ZD: Input Data Speed (KTS) Eta (LT)Document3 pagesDate Time (LT) DTG (NM) Dep. ZD Arr. ZD: Input Data Speed (KTS) Eta (LT)Myint ZawNo ratings yet
- Seo PPT 5Document13 pagesSeo PPT 5Lwin PhyoNo ratings yet
- HVAC TrainingDocument29 pagesHVAC TrainingKagitha Tirumala100% (8)
- Duct Weight EstimatingDocument16 pagesDuct Weight EstimatingfghabboonNo ratings yet
- Usat College Sagay City, Inc.: Nat'L. Highway, Brgy. Poblacion 1, Sagay City, Neg. Occ. Prelim ExamDocument5 pagesUsat College Sagay City, Inc.: Nat'L. Highway, Brgy. Poblacion 1, Sagay City, Neg. Occ. Prelim ExamJoel MilanNo ratings yet
- 1 Fundamentals of ElectrochemistryDocument74 pages1 Fundamentals of ElectrochemistryBalakrishnan Pedda GovindierNo ratings yet
- Triacs For Microwave OvenDocument8 pagesTriacs For Microwave Ovenlucjan52No ratings yet
- POWER SYSTEMS - 1 - QuestionsDocument7 pagesPOWER SYSTEMS - 1 - QuestionsB.Neelakanteshwar RaoNo ratings yet
- Cooling Tower Experiment ReportDocument5 pagesCooling Tower Experiment ReportArsyad SafaiNo ratings yet
- ME8595 QBDocument18 pagesME8595 QBHarish SekarNo ratings yet
- 19 in Game King Plus SpecsDocument7 pages19 in Game King Plus SpecsElvisNo ratings yet
- GL-13 Irrigation Pump Facilities Study and Design FGLDocument166 pagesGL-13 Irrigation Pump Facilities Study and Design FGLEphremNo ratings yet