Download as pdf or txt
You might also like
- CT660 2012Document58 pagesCT660 2012Eduardo Alvarez100% (2)
- Solar Energy by S P Sukhatme PDF Free Download PDFDocument1 pageSolar Energy by S P Sukhatme PDF Free Download PDFUday Suryanarayanaraju10% (10)
- Narayana Class XI CPT Question PaperDocument12 pagesNarayana Class XI CPT Question PaperTariq33% (3)
- 3 Angular Momentum - HKBUDocument25 pages3 Angular Momentum - HKBU刘洋No ratings yet
- Supriadi 2019 J. Phys. Conf. Ser. 1211 012052Document9 pagesSupriadi 2019 J. Phys. Conf. Ser. 1211 012052Electronic BoyNo ratings yet
- Vedantu Physics Formula SheetDocument39 pagesVedantu Physics Formula SheetNARENDRAN S100% (1)
- Assessment01 Latex VisioDocument16 pagesAssessment01 Latex VisioAhsan IslamNo ratings yet
- 1 Linear Momentum - HKBUDocument57 pages1 Linear Momentum - HKBU刘洋No ratings yet
- 4 SHM - HkbuDocument39 pages4 SHM - HkbuPutri NainggolanNo ratings yet
- Neet Oscillations Revision NotesDocument14 pagesNeet Oscillations Revision Notesamitagaikwad79No ratings yet
- Physics M.SC - PHY4102 Classical MechanicsDocument19 pagesPhysics M.SC - PHY4102 Classical MechanicsMuhammad Shoaib100% (1)
- Rotation RevisionDocument56 pagesRotation RevisionBsprogrammerNo ratings yet
- Chapter 5Document48 pagesChapter 5kinddreamer123No ratings yet
- Circular Motion: American Journal of Physics July 2000Document8 pagesCircular Motion: American Journal of Physics July 2000GurjotNo ratings yet
- Rotational Spectroscopy Part 1Document17 pagesRotational Spectroscopy Part 1shrivastavashubhang02No ratings yet
- 6.3 Rotational Kinetic Energy and Rotational Inertia: Lesson-36Document5 pages6.3 Rotational Kinetic Energy and Rotational Inertia: Lesson-36Miliyon Awgichew100% (1)
- MEE212 - by EngrChinonso &EngrDaniel - From The ProdigiesDocument64 pagesMEE212 - by EngrChinonso &EngrDaniel - From The ProdigiesJohn InyiamaNo ratings yet
- Brilliant: Repeaters Neet Model Exam - All UnitDocument38 pagesBrilliant: Repeaters Neet Model Exam - All UnitGoogle CloudNo ratings yet
- Rotation ExerciseDocument21 pagesRotation ExerciseMikaila Denise LoanzonNo ratings yet
- Spectroscopy - Rotational Spectroscopy - Wikiversity PDFDocument36 pagesSpectroscopy - Rotational Spectroscopy - Wikiversity PDFKishore KishoreNo ratings yet
- Spectroscopy - Rotational Spectroscopy - WikiversityDocument36 pagesSpectroscopy - Rotational Spectroscopy - WikiversityKishore KishoreNo ratings yet
- Microwave SpectrosDocument46 pagesMicrowave SpectrosMOHAMMED ABDUL HAINo ratings yet
- Spectroscopy Rotational SpectrosDocument7 pagesSpectroscopy Rotational SpectrosMONERAH D ALOSAIMINo ratings yet
- Molecular Spectroscopy Manmohan Univ PDFDocument107 pagesMolecular Spectroscopy Manmohan Univ PDFakash kumar bhoi100% (2)
- e-PG Pathshala: Ncipal InvestigatorDocument11 pagese-PG Pathshala: Ncipal InvestigatorTejinder SinghNo ratings yet
- Lectures of The Department of Mechanical Engineering Subject Title: Class: 2nd YearDocument191 pagesLectures of The Department of Mechanical Engineering Subject Title: Class: 2nd Yearaljanabi089No ratings yet
- Quantum Mechanics NotesDocument23 pagesQuantum Mechanics Notesnaman shahNo ratings yet
- Chapter IDocument37 pagesChapter IeyobNo ratings yet
- ICTS Talks Pallab BasuDocument7 pagesICTS Talks Pallab BasuAnonymous BFYoYomzaONo ratings yet
- Microwave SpectrosDocument46 pagesMicrowave Spectros5fdt78kgscNo ratings yet
- 1718 Grade 11 Applied Exam Related Materials (MHS) T3 Wk1Document11 pages1718 Grade 11 Applied Exam Related Materials (MHS) T3 Wk1maemma olivarNo ratings yet
- Instrukcja PS1 cw4Document22 pagesInstrukcja PS1 cw4verenichdanielfiNo ratings yet
- A Study On Orbital MechanicsDocument14 pagesA Study On Orbital MechanicsEditor IJTSRDNo ratings yet
- Aakash JeeDocument5 pagesAakash JeeVansh BhardwajNo ratings yet
- Chapter-5 Rotational MotionDocument7 pagesChapter-5 Rotational MotionMd Najmul HudaNo ratings yet
- RBD - NotesDocument8 pagesRBD - Notes530 B Y ManojNo ratings yet
- Physics All FormulaDocument38 pagesPhysics All FormulaApurvaNo ratings yet
- 7 - Moment of InertiaDocument11 pages7 - Moment of Inertiafrank dumbleNo ratings yet
- Physics C Rotational Motion Name: - AP Review PacketDocument6 pagesPhysics C Rotational Motion Name: - AP Review PacketYudhistira NixNo ratings yet
- Cbse Class 11 Physics Notes Chapter 14 OscillationsDocument19 pagesCbse Class 11 Physics Notes Chapter 14 Oscillationsnc5836795No ratings yet
- Introduction To Engineering Mechanics PDDocument21 pagesIntroduction To Engineering Mechanics PDReyzel Anne FaylognaNo ratings yet
- VBR Neet Academy & Pu College: Kcet Grand Test-6 - PCMBDocument18 pagesVBR Neet Academy & Pu College: Kcet Grand Test-6 - PCMBAmogh PalyamNo ratings yet
- Important Questions For CBSE Class 11 Physics Chapter 7Document61 pagesImportant Questions For CBSE Class 11 Physics Chapter 7MugdhaNo ratings yet
- Spectroscopy - Rotational Spectroscopy - WikiversityDocument9 pagesSpectroscopy - Rotational Spectroscopy - WikiversityDr. Gazi Jahirul ISlamNo ratings yet
- Concept Strengthening Sheet (CSS-02) - RM - PhysicsDocument5 pagesConcept Strengthening Sheet (CSS-02) - RM - PhysicsNancy RaniNo ratings yet
- Microwave Spectroscopy BSC Lect 2Document43 pagesMicrowave Spectroscopy BSC Lect 2anon_916856395100% (1)
- Quantum Mechanics II: George SiopsisDocument127 pagesQuantum Mechanics II: George SiopsisSoumajit DasNo ratings yet
- 3 Rotational Spectroscopy1Document19 pages3 Rotational Spectroscopy1Omprakash LatiyalNo ratings yet
- (Eng) 1-7 General Physics Laboratory1 (2020)Document8 pages(Eng) 1-7 General Physics Laboratory1 (2020)Draden DradenNo ratings yet
- Summer Project Report: Debaiudh Das National Institute of Science Education and Research, BhubaneswarDocument12 pagesSummer Project Report: Debaiudh Das National Institute of Science Education and Research, BhubaneswarDebaiudhDasNo ratings yet
- Moment of Inertia Slides-1Document20 pagesMoment of Inertia Slides-1Thato TumeloNo ratings yet
- Bhavikatti Engineering Mechanics SampleDocument11 pagesBhavikatti Engineering Mechanics SamplehakeemniyasNo ratings yet
- Oscillatory MotionDocument182 pagesOscillatory MotionAlain McVaneyNo ratings yet
- Important Questions Physics CLASS 11Document4 pagesImportant Questions Physics CLASS 11Palak AgarwalNo ratings yet
- NP Notes - Module 4 Only Quantum MechanicsDocument17 pagesNP Notes - Module 4 Only Quantum MechanicsNightHawkNo ratings yet
- A Case Study On Simple Harmonic Motion and Its Application: August 2017Document11 pagesA Case Study On Simple Harmonic Motion and Its Application: August 2017Conta Do FDPNo ratings yet
- RotspectrDocument12 pagesRotspectrمحمد گراوندNo ratings yet
- LN8 21 099OscillationandWavesNoteDocument60 pagesLN8 21 099OscillationandWavesNoteuoyilmazNo ratings yet
- Microwave Spectroscopy BSc-Lect-2-1Document43 pagesMicrowave Spectroscopy BSc-Lect-2-1Varun JogiNo ratings yet
- ArXivMOND10 16 06Document5 pagesArXivMOND10 16 06Dr. Harry RIngermacherNo ratings yet
- Solutions of Inverse Geodetic Problem in Navigational Applications PDFDocument5 pagesSolutions of Inverse Geodetic Problem in Navigational Applications PDFLacci123No ratings yet
- Beta wp311 PDFDocument18 pagesBeta wp311 PDFmarcotuliolopesNo ratings yet
- ANTenna DocumentDocument755 pagesANTenna Documentawadhesh04100% (3)
- P1 - Lengua ExtranjeraDocument4 pagesP1 - Lengua ExtranjeraJOSHUA ELIHU OLIVO MOHEYERNo ratings yet
- Understanding DoS Logs and Counters RevCDocument10 pagesUnderstanding DoS Logs and Counters RevCWashington CárdenasNo ratings yet
- How To Configure Video Recording and Picture Capturing On DS-K1T500S&501SFDocument7 pagesHow To Configure Video Recording and Picture Capturing On DS-K1T500S&501SFwingNo ratings yet
- Experiments With An Axial Fan: Page 1/3 10/2010Document3 pagesExperiments With An Axial Fan: Page 1/3 10/2010Priyam ParasharNo ratings yet
- August Losch Model of Central Place: Prof. Nizamuddin Khan D/O Geography, AMU, AligarhDocument17 pagesAugust Losch Model of Central Place: Prof. Nizamuddin Khan D/O Geography, AMU, AligarhVishvarajNo ratings yet
- Canadian - Solar-Datasheet-MaxPower - CS6U-325P - v5.562 - EN CSI PDFDocument2 pagesCanadian - Solar-Datasheet-MaxPower - CS6U-325P - v5.562 - EN CSI PDFLif AhadiNo ratings yet
- Long Quiz 1-BDocument11 pagesLong Quiz 1-BEthel FajardoNo ratings yet
- Assignment 1-Blueprint Reading Recap and Introduction To SolidWorks v1Document19 pagesAssignment 1-Blueprint Reading Recap and Introduction To SolidWorks v1Carlo BalbuenaNo ratings yet
- Electolux EFLS617SIW 4.4 Cu. FTDocument32 pagesElectolux EFLS617SIW 4.4 Cu. FTpalkybdNo ratings yet
- Charging Communication: With ISO 15118Document4 pagesCharging Communication: With ISO 15118qmnwebNo ratings yet
- Session 9808 - IMS PerfDocument45 pagesSession 9808 - IMS Perfemeka2012No ratings yet
- Amine SystemsDocument38 pagesAmine SystemsBrett ClintonNo ratings yet
- Palynology (Pollen, Spores, Etc.) : Palynology Sensu Stricto and Sensu LatoDocument10 pagesPalynology (Pollen, Spores, Etc.) : Palynology Sensu Stricto and Sensu Latoxraghad99No ratings yet
- 5 Lantai Pintu AutomatisDocument4 pages5 Lantai Pintu AutomatisHASAN LANGGENGNo ratings yet
- Cable Pulling GuideDocument7 pagesCable Pulling GuideBryan TanNo ratings yet
- GM4E01Document14 pagesGM4E01canasto100% (1)
- Indivisual Assignment by Raja Dilawar Riaz 297151Document13 pagesIndivisual Assignment by Raja Dilawar Riaz 297151Raja DIlawarNo ratings yet
- Solar PV at MSC Proposal 2 9 16Document5 pagesSolar PV at MSC Proposal 2 9 16Decision SitoboliNo ratings yet
- Almanac Data For IRNSSDocument2 pagesAlmanac Data For IRNSSBaka NuduNo ratings yet
- MECH 1A - IntroooDocument11 pagesMECH 1A - IntroooLey YanNo ratings yet
- 3VA23405HL320AA0 Datasheet enDocument8 pages3VA23405HL320AA0 Datasheet enjoel marshallNo ratings yet
- 5.5.4.2 Calculation of First-Order Moments Around Mid-HeightDocument2 pages5.5.4.2 Calculation of First-Order Moments Around Mid-HeightBertin BakariNo ratings yet
- Am2xx enDocument34 pagesAm2xx enpham linhNo ratings yet
- 2019-Me-111 Lab Report 2 (Quick Return Mechanism)Document8 pages2019-Me-111 Lab Report 2 (Quick Return Mechanism)touqeerahmad 9058No ratings yet
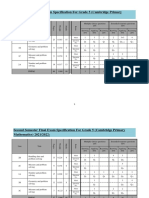
- Grade 5 Specifications CambridgeDocument2 pagesGrade 5 Specifications CambridgekatyaNo ratings yet