
Can Network Management
Can Network Management
You might also like
- Musical Acoustics PDFDocument26 pagesMusical Acoustics PDFGino Mendoza0% (1)
- Renaissance Woman: Fat Loss, Muscle Growth & Performance Through Scientific EatingDocument20 pagesRenaissance Woman: Fat Loss, Muscle Growth & Performance Through Scientific EatingBenedict Ray Andhika33% (3)
- The Essentials of Psychodynamic PsychotherapyDocument6 pagesThe Essentials of Psychodynamic PsychotherapyMarthaRamirez100% (3)
- Professional Practice Session 1Document23 pagesProfessional Practice Session 1Dina HawashNo ratings yet
- Jolly Grammar Programme P1-6Document8 pagesJolly Grammar Programme P1-6Mandy Whorlow100% (3)
- Synthesis Outline + Essay TemplateDocument7 pagesSynthesis Outline + Essay TemplatefirdausNo ratings yet
- GM Can CommunicationDocument8 pagesGM Can Communicationcherokewag100% (1)
- Presentation CAN NMDocument15 pagesPresentation CAN NMPhong LêNo ratings yet
- PSOC Unit 5Document23 pagesPSOC Unit 5jagabeeee100% (1)
- Computer System Architecture MCA - 301Document10 pagesComputer System Architecture MCA - 301Mangesh MalvankarNo ratings yet
- ND1 Engine Control Unit (ECU) - 4Document7 pagesND1 Engine Control Unit (ECU) - 4Sameer RijalNo ratings yet
- LTE Paging MechanismDocument4 pagesLTE Paging MechanismmahmoudNo ratings yet
- A Generic Dss Model: Unit 8Document39 pagesA Generic Dss Model: Unit 8Deepa ShreeNo ratings yet
- Transient Stability Analysis Using MATLAB Simulink and Neural NetworkDocument6 pagesTransient Stability Analysis Using MATLAB Simulink and Neural NetworkTtrtRéśearćhCéntréNo ratings yet
- ND1 Engine Control Unit (ECU) - 4 - 2 - RemovedDocument6 pagesND1 Engine Control Unit (ECU) - 4 - 2 - RemovedSameer RijalNo ratings yet
- CanOpen PrimerDocument13 pagesCanOpen PrimerDumitru GheorgheNo ratings yet
- Chapter 6 Basic Signaling ProceduresDocument68 pagesChapter 6 Basic Signaling ProceduresEfosa AigbeNo ratings yet
- Ard Based Elevator Control SystemDocument7 pagesArd Based Elevator Control SystemIRJIENo ratings yet
- Final Project 2022nourDocument41 pagesFinal Project 2022nournour salahNo ratings yet
- Lecture 2Document58 pagesLecture 2ZelalemNo ratings yet
- Four Quadrant Speed Control of DC Motor With The Help of AT89S52 MicrocontrollerDocument12 pagesFour Quadrant Speed Control of DC Motor With The Help of AT89S52 MicrocontrollerpriyaNo ratings yet
- Automotive Electronic Diagnostics (Course 2)From EverandAutomotive Electronic Diagnostics (Course 2)Rating: 4 out of 5 stars4/5 (2)
- 5 Oeo107230 Lte Eran6.0 Cs Fallback Feature Issue 1.00Document34 pages5 Oeo107230 Lte Eran6.0 Cs Fallback Feature Issue 1.00Ali AlshwalNo ratings yet
- LTE Interview Questions Field, Planning and OptimisationDocument37 pagesLTE Interview Questions Field, Planning and Optimisationsalim hammadi100% (1)
- SPC ExchanceDocument12 pagesSPC ExchanceCis MarkNo ratings yet
- Embedded System Unit 5Document22 pagesEmbedded System Unit 5BalaNo ratings yet
- What Is An Electronic Speed Controller & How Does An ESC Work - Tyto RoboticsDocument11 pagesWhat Is An Electronic Speed Controller & How Does An ESC Work - Tyto Roboticssigmafranco8No ratings yet
- LTE KPI Optimization: RRC Success Rate: Common Failures in ERAB Setup PhaseDocument6 pagesLTE KPI Optimization: RRC Success Rate: Common Failures in ERAB Setup Phasededdi s samosirNo ratings yet
- Motor Speed Control Based On Temperature Using Can ProtocolDocument4 pagesMotor Speed Control Based On Temperature Using Can ProtocolseventhsensegroupNo ratings yet
- Electronic Space Division Switching: Networks-Dstn-By-Ramya-Ranjan-ChoudhuryDocument8 pagesElectronic Space Division Switching: Networks-Dstn-By-Ramya-Ranjan-ChoudhuryKARTHIKNo ratings yet
- IEEE 802.11 MAC Simulator With DCF and Power-Saving ModeDocument15 pagesIEEE 802.11 MAC Simulator With DCF and Power-Saving ModejanardhanabNo ratings yet
- Docs 13028992904f8bd9bf648f0Document15 pagesDocs 13028992904f8bd9bf648f0Verruumm AmineNo ratings yet
- System Acquisition in Cdma Mobile TerminalsDocument8 pagesSystem Acquisition in Cdma Mobile Terminalsswapnilthakur62No ratings yet
- SWIN Chapter 3 (2023)Document27 pagesSWIN Chapter 3 (2023)Magarsaa Qana'iiNo ratings yet
- Computer Integrated Design and ManufacturingDocument16 pagesComputer Integrated Design and ManufacturingPrajwal JaiswalNo ratings yet
- Electronic Space Division SwitchingDocument8 pagesElectronic Space Division SwitchingKARTHIKNo ratings yet
- 3.automated Transformer Coil Winding MachineDocument31 pages3.automated Transformer Coil Winding Machinecelphone533No ratings yet
- Power ModeDocument15 pagesPower ModeFenni Kristiani SarumahaNo ratings yet
- BY Umar Shuaibu (Roll No. 140125014)Document17 pagesBY Umar Shuaibu (Roll No. 140125014)Princy Merin JoseNo ratings yet
- AN4503.Power Management For KinetisDocument69 pagesAN4503.Power Management For KinetisyoonghmNo ratings yet
- Manual Td2310tu, Td2410tuDocument12 pagesManual Td2310tu, Td2410tujnsosa3No ratings yet
- POINT TO POINT LED SYSTEM WITH LPL GENERAL TECHNICAL DOCUMENT - Rev. 00 0213Document14 pagesPOINT TO POINT LED SYSTEM WITH LPL GENERAL TECHNICAL DOCUMENT - Rev. 00 0213Sanela BeganovicNo ratings yet
- Lte Erab Setup Phase Description and Common Failures PDFDocument8 pagesLte Erab Setup Phase Description and Common Failures PDFjoseNo ratings yet
- Erab Set Up Fail: LTE KPI Optimization: RRC Success RateDocument4 pagesErab Set Up Fail: LTE KPI Optimization: RRC Success Ratemadanmohan22No ratings yet
- AQM Test Report 21 08 2013Document3 pagesAQM Test Report 21 08 2013Mohamed YehiaNo ratings yet
- Microcontroller Based Closed-Loop Automatic Speed Control of DC Motor Using PWMDocument4 pagesMicrocontroller Based Closed-Loop Automatic Speed Control of DC Motor Using PWMSphasonke Daniel ZhouNo ratings yet
- Servo Motor Control Application On A Local Interconnect Network (LIN)Document31 pagesServo Motor Control Application On A Local Interconnect Network (LIN)Diego CadoreNo ratings yet
- Multiple Power Domains (MS Thesis Ivar Håkon Lysfjord)Document58 pagesMultiple Power Domains (MS Thesis Ivar Håkon Lysfjord)yanivscribdNo ratings yet
- Eio0000000064 03Document95 pagesEio0000000064 03BlakeNo ratings yet
- RRC Success Rate Degrade After Adding The Second SCCPCHDocument3 pagesRRC Success Rate Degrade After Adding The Second SCCPCHmosesNo ratings yet
- Chapter No.:-01 Introuuction: Pulse-Width Modulation (PWM), Modulation (PDM)Document63 pagesChapter No.:-01 Introuuction: Pulse-Width Modulation (PWM), Modulation (PDM)Pooja BanNo ratings yet
- Unit 4 - Power System Operation and ControlDocument25 pagesUnit 4 - Power System Operation and ControlSilas StephenNo ratings yet
- 3G 2G Selection Reselection HandoverDocument50 pages3G 2G Selection Reselection HandoverMohammed Nazim100% (1)
- The Control Unit Unit 4Document18 pagesThe Control Unit Unit 4SongYak YamNo ratings yet
- OS Concepts Chapter 1 Solutions To Practice Exercises Part 2Document2 pagesOS Concepts Chapter 1 Solutions To Practice Exercises Part 2Alfred FredNo ratings yet
- Ee8702-Unit 5Document21 pagesEe8702-Unit 5S MAHENDIRANNo ratings yet
- Ecu MappingDocument8 pagesEcu MappingVitor SegniniNo ratings yet
- 4G PagingDocument22 pages4G Pagingaslam_326580186No ratings yet
- GSM Based Distribution Transformer Monitoring and Controlling System Ijariie1748Document3 pagesGSM Based Distribution Transformer Monitoring and Controlling System Ijariie1748Velu SamyNo ratings yet
- Power Network Control ReportDocument7 pagesPower Network Control ReportTawanda Daniel DenguNo ratings yet
- Demand Management: Progressive Circuit Shut DownDocument4 pagesDemand Management: Progressive Circuit Shut DownhrstgaNo ratings yet
- Construction of Energy (KWH) Meter With GSM and IoTDocument88 pagesConstruction of Energy (KWH) Meter With GSM and IoT209x1a04j5No ratings yet
- The Control Unit (CU) Is A Component of A Computer's Central Processing 2Document6 pagesThe Control Unit (CU) Is A Component of A Computer's Central Processing 2TrixieNo ratings yet
- Optimization 3GDocument10 pagesOptimization 3Gkiller-kittiesNo ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- Mge 4Document17 pagesMge 4RUPAV TIWARINo ratings yet
- Flyer OASIS - MANILA TRANSPORTERDocument1 pageFlyer OASIS - MANILA TRANSPORTERNoryl John Mates SaturinasNo ratings yet
- TG0012 enDocument24 pagesTG0012 enDhexter VillaNo ratings yet
- Birinci Pozisyon Notalar Ve IsimleriDocument3 pagesBirinci Pozisyon Notalar Ve IsimleriEmre KözNo ratings yet
- T-Systems CPNI Policy Statement - Final 022717 PDFDocument2 pagesT-Systems CPNI Policy Statement - Final 022717 PDFFederal Communications Commission (FCC)No ratings yet
- Shaping The Way We Teach English:: Successful Practices Around The WorldDocument5 pagesShaping The Way We Teach English:: Successful Practices Around The WorldCristina DiaconuNo ratings yet
- 8 Lec 03 - Partnership Formation With BusinessDocument2 pages8 Lec 03 - Partnership Formation With BusinessNathalie GetinoNo ratings yet
- Absorption Costing PDFDocument10 pagesAbsorption Costing PDFAnonymous leF4GPYNo ratings yet
- Drill #1 With RationaleDocument12 pagesDrill #1 With RationaleRellie CastroNo ratings yet
- Installation, Operation and Maintenance Manual: Rotoclone LVNDocument23 pagesInstallation, Operation and Maintenance Manual: Rotoclone LVNbertan dağıstanlıNo ratings yet
- Data Sheet 68749835 Electronic Throttle BodyDocument3 pagesData Sheet 68749835 Electronic Throttle BodyDaniel AguirreNo ratings yet
- Risk Assessment - COVID 19 Restart of Activities Mina Justa-V3Document81 pagesRisk Assessment - COVID 19 Restart of Activities Mina Justa-V3Shmi HectorNo ratings yet
- Human Resource Management PrelimsDocument2 pagesHuman Resource Management PrelimsLei PalumponNo ratings yet
- Invoice: Qrt. No - : Cc-15, Civil Township Rourkela, Dist - (Sundargarh (Odisha) - 769012 GSTIN - 21ACWFS2234G1Z4Document2 pagesInvoice: Qrt. No - : Cc-15, Civil Township Rourkela, Dist - (Sundargarh (Odisha) - 769012 GSTIN - 21ACWFS2234G1Z4PUNYASHLOK PANDANo ratings yet
- Cutoff1 101020 0Document3 pagesCutoff1 101020 0ghi98183No ratings yet
- Goldilocks and The Three Bears Model Text 2Document5 pagesGoldilocks and The Three Bears Model Text 2api-407594542No ratings yet
- PDFDocument86 pagesPDFAnonymous GuMUWwGMNo ratings yet
- Power Point Skripsi UmarDocument12 pagesPower Point Skripsi UmarMuchamad Umar Chatab NasserieNo ratings yet
- GLS-LS40GW Specification 20200902Document5 pagesGLS-LS40GW Specification 20200902houyamelkandoussiNo ratings yet
- Product Data Sheet Ingenuity Core LRDocument16 pagesProduct Data Sheet Ingenuity Core LRCeoĐứcTrườngNo ratings yet
- User Manual of CUBOIDDocument50 pagesUser Manual of CUBOIDshahinur rahmanNo ratings yet
- Intro To ForsciDocument16 pagesIntro To ForsciChloe MaciasNo ratings yet
- Indercos2021 Fulltext Congress BookDocument294 pagesIndercos2021 Fulltext Congress BookDr Sneha's Skin and Allergy Clinic IndiaNo ratings yet
- ENISA Secure Software Engineering InitiativesDocument96 pagesENISA Secure Software Engineering InitiativesstrokenfilledNo ratings yet
























































































Download as docx, pdf, or txt
You might also like
- Musical Acoustics PDFDocument26 pagesMusical Acoustics PDFGino Mendoza0% (1)
- Renaissance Woman: Fat Loss, Muscle Growth & Performance Through Scientific EatingDocument20 pagesRenaissance Woman: Fat Loss, Muscle Growth & Performance Through Scientific EatingBenedict Ray Andhika33% (3)
- The Essentials of Psychodynamic PsychotherapyDocument6 pagesThe Essentials of Psychodynamic PsychotherapyMarthaRamirez100% (3)
- Professional Practice Session 1Document23 pagesProfessional Practice Session 1Dina HawashNo ratings yet
- Jolly Grammar Programme P1-6Document8 pagesJolly Grammar Programme P1-6Mandy Whorlow100% (3)
- Synthesis Outline + Essay TemplateDocument7 pagesSynthesis Outline + Essay TemplatefirdausNo ratings yet
- GM Can CommunicationDocument8 pagesGM Can Communicationcherokewag100% (1)
- Presentation CAN NMDocument15 pagesPresentation CAN NMPhong LêNo ratings yet
- PSOC Unit 5Document23 pagesPSOC Unit 5jagabeeee100% (1)
- Computer System Architecture MCA - 301Document10 pagesComputer System Architecture MCA - 301Mangesh MalvankarNo ratings yet
- ND1 Engine Control Unit (ECU) - 4Document7 pagesND1 Engine Control Unit (ECU) - 4Sameer RijalNo ratings yet
- LTE Paging MechanismDocument4 pagesLTE Paging MechanismmahmoudNo ratings yet
- A Generic Dss Model: Unit 8Document39 pagesA Generic Dss Model: Unit 8Deepa ShreeNo ratings yet
- Transient Stability Analysis Using MATLAB Simulink and Neural NetworkDocument6 pagesTransient Stability Analysis Using MATLAB Simulink and Neural NetworkTtrtRéśearćhCéntréNo ratings yet
- ND1 Engine Control Unit (ECU) - 4 - 2 - RemovedDocument6 pagesND1 Engine Control Unit (ECU) - 4 - 2 - RemovedSameer RijalNo ratings yet
- CanOpen PrimerDocument13 pagesCanOpen PrimerDumitru GheorgheNo ratings yet
- Chapter 6 Basic Signaling ProceduresDocument68 pagesChapter 6 Basic Signaling ProceduresEfosa AigbeNo ratings yet
- Ard Based Elevator Control SystemDocument7 pagesArd Based Elevator Control SystemIRJIENo ratings yet
- Final Project 2022nourDocument41 pagesFinal Project 2022nournour salahNo ratings yet
- Lecture 2Document58 pagesLecture 2ZelalemNo ratings yet
- Four Quadrant Speed Control of DC Motor With The Help of AT89S52 MicrocontrollerDocument12 pagesFour Quadrant Speed Control of DC Motor With The Help of AT89S52 MicrocontrollerpriyaNo ratings yet
- Automotive Electronic Diagnostics (Course 2)From EverandAutomotive Electronic Diagnostics (Course 2)Rating: 4 out of 5 stars4/5 (2)
- 5 Oeo107230 Lte Eran6.0 Cs Fallback Feature Issue 1.00Document34 pages5 Oeo107230 Lte Eran6.0 Cs Fallback Feature Issue 1.00Ali AlshwalNo ratings yet
- LTE Interview Questions Field, Planning and OptimisationDocument37 pagesLTE Interview Questions Field, Planning and Optimisationsalim hammadi100% (1)
- SPC ExchanceDocument12 pagesSPC ExchanceCis MarkNo ratings yet
- Embedded System Unit 5Document22 pagesEmbedded System Unit 5BalaNo ratings yet
- What Is An Electronic Speed Controller & How Does An ESC Work - Tyto RoboticsDocument11 pagesWhat Is An Electronic Speed Controller & How Does An ESC Work - Tyto Roboticssigmafranco8No ratings yet
- LTE KPI Optimization: RRC Success Rate: Common Failures in ERAB Setup PhaseDocument6 pagesLTE KPI Optimization: RRC Success Rate: Common Failures in ERAB Setup Phasededdi s samosirNo ratings yet
- Motor Speed Control Based On Temperature Using Can ProtocolDocument4 pagesMotor Speed Control Based On Temperature Using Can ProtocolseventhsensegroupNo ratings yet
- Electronic Space Division Switching: Networks-Dstn-By-Ramya-Ranjan-ChoudhuryDocument8 pagesElectronic Space Division Switching: Networks-Dstn-By-Ramya-Ranjan-ChoudhuryKARTHIKNo ratings yet
- IEEE 802.11 MAC Simulator With DCF and Power-Saving ModeDocument15 pagesIEEE 802.11 MAC Simulator With DCF and Power-Saving ModejanardhanabNo ratings yet
- Docs 13028992904f8bd9bf648f0Document15 pagesDocs 13028992904f8bd9bf648f0Verruumm AmineNo ratings yet
- System Acquisition in Cdma Mobile TerminalsDocument8 pagesSystem Acquisition in Cdma Mobile Terminalsswapnilthakur62No ratings yet
- SWIN Chapter 3 (2023)Document27 pagesSWIN Chapter 3 (2023)Magarsaa Qana'iiNo ratings yet
- Computer Integrated Design and ManufacturingDocument16 pagesComputer Integrated Design and ManufacturingPrajwal JaiswalNo ratings yet
- Electronic Space Division SwitchingDocument8 pagesElectronic Space Division SwitchingKARTHIKNo ratings yet
- 3.automated Transformer Coil Winding MachineDocument31 pages3.automated Transformer Coil Winding Machinecelphone533No ratings yet
- Power ModeDocument15 pagesPower ModeFenni Kristiani SarumahaNo ratings yet
- BY Umar Shuaibu (Roll No. 140125014)Document17 pagesBY Umar Shuaibu (Roll No. 140125014)Princy Merin JoseNo ratings yet
- AN4503.Power Management For KinetisDocument69 pagesAN4503.Power Management For KinetisyoonghmNo ratings yet
- Manual Td2310tu, Td2410tuDocument12 pagesManual Td2310tu, Td2410tujnsosa3No ratings yet
- POINT TO POINT LED SYSTEM WITH LPL GENERAL TECHNICAL DOCUMENT - Rev. 00 0213Document14 pagesPOINT TO POINT LED SYSTEM WITH LPL GENERAL TECHNICAL DOCUMENT - Rev. 00 0213Sanela BeganovicNo ratings yet
- Lte Erab Setup Phase Description and Common Failures PDFDocument8 pagesLte Erab Setup Phase Description and Common Failures PDFjoseNo ratings yet
- Erab Set Up Fail: LTE KPI Optimization: RRC Success RateDocument4 pagesErab Set Up Fail: LTE KPI Optimization: RRC Success Ratemadanmohan22No ratings yet
- AQM Test Report 21 08 2013Document3 pagesAQM Test Report 21 08 2013Mohamed YehiaNo ratings yet
- Microcontroller Based Closed-Loop Automatic Speed Control of DC Motor Using PWMDocument4 pagesMicrocontroller Based Closed-Loop Automatic Speed Control of DC Motor Using PWMSphasonke Daniel ZhouNo ratings yet
- Servo Motor Control Application On A Local Interconnect Network (LIN)Document31 pagesServo Motor Control Application On A Local Interconnect Network (LIN)Diego CadoreNo ratings yet
- Multiple Power Domains (MS Thesis Ivar Håkon Lysfjord)Document58 pagesMultiple Power Domains (MS Thesis Ivar Håkon Lysfjord)yanivscribdNo ratings yet
- Eio0000000064 03Document95 pagesEio0000000064 03BlakeNo ratings yet
- RRC Success Rate Degrade After Adding The Second SCCPCHDocument3 pagesRRC Success Rate Degrade After Adding The Second SCCPCHmosesNo ratings yet
- Chapter No.:-01 Introuuction: Pulse-Width Modulation (PWM), Modulation (PDM)Document63 pagesChapter No.:-01 Introuuction: Pulse-Width Modulation (PWM), Modulation (PDM)Pooja BanNo ratings yet
- Unit 4 - Power System Operation and ControlDocument25 pagesUnit 4 - Power System Operation and ControlSilas StephenNo ratings yet
- 3G 2G Selection Reselection HandoverDocument50 pages3G 2G Selection Reselection HandoverMohammed Nazim100% (1)
- The Control Unit Unit 4Document18 pagesThe Control Unit Unit 4SongYak YamNo ratings yet
- OS Concepts Chapter 1 Solutions To Practice Exercises Part 2Document2 pagesOS Concepts Chapter 1 Solutions To Practice Exercises Part 2Alfred FredNo ratings yet
- Ee8702-Unit 5Document21 pagesEe8702-Unit 5S MAHENDIRANNo ratings yet
- Ecu MappingDocument8 pagesEcu MappingVitor SegniniNo ratings yet
- 4G PagingDocument22 pages4G Pagingaslam_326580186No ratings yet
- GSM Based Distribution Transformer Monitoring and Controlling System Ijariie1748Document3 pagesGSM Based Distribution Transformer Monitoring and Controlling System Ijariie1748Velu SamyNo ratings yet
- Power Network Control ReportDocument7 pagesPower Network Control ReportTawanda Daniel DenguNo ratings yet
- Demand Management: Progressive Circuit Shut DownDocument4 pagesDemand Management: Progressive Circuit Shut DownhrstgaNo ratings yet
- Construction of Energy (KWH) Meter With GSM and IoTDocument88 pagesConstruction of Energy (KWH) Meter With GSM and IoT209x1a04j5No ratings yet
- The Control Unit (CU) Is A Component of A Computer's Central Processing 2Document6 pagesThe Control Unit (CU) Is A Component of A Computer's Central Processing 2TrixieNo ratings yet
- Optimization 3GDocument10 pagesOptimization 3Gkiller-kittiesNo ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- Mge 4Document17 pagesMge 4RUPAV TIWARINo ratings yet
- Flyer OASIS - MANILA TRANSPORTERDocument1 pageFlyer OASIS - MANILA TRANSPORTERNoryl John Mates SaturinasNo ratings yet
- TG0012 enDocument24 pagesTG0012 enDhexter VillaNo ratings yet
- Birinci Pozisyon Notalar Ve IsimleriDocument3 pagesBirinci Pozisyon Notalar Ve IsimleriEmre KözNo ratings yet
- T-Systems CPNI Policy Statement - Final 022717 PDFDocument2 pagesT-Systems CPNI Policy Statement - Final 022717 PDFFederal Communications Commission (FCC)No ratings yet
- Shaping The Way We Teach English:: Successful Practices Around The WorldDocument5 pagesShaping The Way We Teach English:: Successful Practices Around The WorldCristina DiaconuNo ratings yet
- 8 Lec 03 - Partnership Formation With BusinessDocument2 pages8 Lec 03 - Partnership Formation With BusinessNathalie GetinoNo ratings yet
- Absorption Costing PDFDocument10 pagesAbsorption Costing PDFAnonymous leF4GPYNo ratings yet
- Drill #1 With RationaleDocument12 pagesDrill #1 With RationaleRellie CastroNo ratings yet
- Installation, Operation and Maintenance Manual: Rotoclone LVNDocument23 pagesInstallation, Operation and Maintenance Manual: Rotoclone LVNbertan dağıstanlıNo ratings yet
- Data Sheet 68749835 Electronic Throttle BodyDocument3 pagesData Sheet 68749835 Electronic Throttle BodyDaniel AguirreNo ratings yet
- Risk Assessment - COVID 19 Restart of Activities Mina Justa-V3Document81 pagesRisk Assessment - COVID 19 Restart of Activities Mina Justa-V3Shmi HectorNo ratings yet
- Human Resource Management PrelimsDocument2 pagesHuman Resource Management PrelimsLei PalumponNo ratings yet
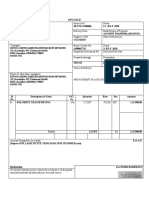
- Invoice: Qrt. No - : Cc-15, Civil Township Rourkela, Dist - (Sundargarh (Odisha) - 769012 GSTIN - 21ACWFS2234G1Z4Document2 pagesInvoice: Qrt. No - : Cc-15, Civil Township Rourkela, Dist - (Sundargarh (Odisha) - 769012 GSTIN - 21ACWFS2234G1Z4PUNYASHLOK PANDANo ratings yet
- Cutoff1 101020 0Document3 pagesCutoff1 101020 0ghi98183No ratings yet
- Goldilocks and The Three Bears Model Text 2Document5 pagesGoldilocks and The Three Bears Model Text 2api-407594542No ratings yet
- PDFDocument86 pagesPDFAnonymous GuMUWwGMNo ratings yet
- Power Point Skripsi UmarDocument12 pagesPower Point Skripsi UmarMuchamad Umar Chatab NasserieNo ratings yet
- GLS-LS40GW Specification 20200902Document5 pagesGLS-LS40GW Specification 20200902houyamelkandoussiNo ratings yet
- Product Data Sheet Ingenuity Core LRDocument16 pagesProduct Data Sheet Ingenuity Core LRCeoĐứcTrườngNo ratings yet
- User Manual of CUBOIDDocument50 pagesUser Manual of CUBOIDshahinur rahmanNo ratings yet
- Intro To ForsciDocument16 pagesIntro To ForsciChloe MaciasNo ratings yet
- Indercos2021 Fulltext Congress BookDocument294 pagesIndercos2021 Fulltext Congress BookDr Sneha's Skin and Allergy Clinic IndiaNo ratings yet
- ENISA Secure Software Engineering InitiativesDocument96 pagesENISA Secure Software Engineering InitiativesstrokenfilledNo ratings yet