Download as pdf or txt
You might also like
- Ford As-Built Tire Calculator v3.0Document38 pagesFord As-Built Tire Calculator v3.0Mantenimiento Diesel100% (2)
- 01 Presentation AlstomDocument16 pages01 Presentation Alstomrakesh.parmar100% (1)
- On The Safety of Connected Cruise Control: Analysis and Synthesis With Control Barrier FunctionsDocument6 pagesOn The Safety of Connected Cruise Control: Analysis and Synthesis With Control Barrier FunctionsDaniele MarconiNo ratings yet
- Uncertainty, Efficiency, and Stability of Mixed Traffic Flow - Stochastic Model-Based Analyses-10.1177 - 03611981231215338Document22 pagesUncertainty, Efficiency, and Stability of Mixed Traffic Flow - Stochastic Model-Based Analyses-10.1177 - 036119812312153382331600No ratings yet
- Pressure Traffic Signal Control With Fixed and Adaptive Routing For Urban Vehicular NetworksDocument10 pagesPressure Traffic Signal Control With Fixed and Adaptive Routing For Urban Vehicular Networksnaumanhaider007No ratings yet
- Resilient and Safe Platooning Control of Connected Automated Vehicles Against Intermittent Denial-of-Service AttacksDocument18 pagesResilient and Safe Platooning Control of Connected Automated Vehicles Against Intermittent Denial-of-Service AttacksQing WuNo ratings yet
- Impact of Cyber-AttacksDocument12 pagesImpact of Cyber-Attacksrajvi yadavNo ratings yet
- Spatial-Dependent Robust Control Strategy For On-Ramp MergingDocument15 pagesSpatial-Dependent Robust Control Strategy For On-Ramp Merging2331600No ratings yet
- Ploeg 2011 Design and Experimental Evaluation of Cooperative Adaptive Cruise Control (Proceedings)Document6 pagesPloeg 2011 Design and Experimental Evaluation of Cooperative Adaptive Cruise Control (Proceedings)Enkhbaatar TumenjargalNo ratings yet
- Sensors: A Hybrid Planning Approach Based On MPC and Parametric Curves For Overtaking ManeuversDocument19 pagesSensors: A Hybrid Planning Approach Based On MPC and Parametric Curves For Overtaking ManeuversrayNo ratings yet
- V2X-Based Decentralized Cooperative Adaptive Cruise Control in The Vicinity of IntersectionsDocument15 pagesV2X-Based Decentralized Cooperative Adaptive Cruise Control in The Vicinity of Intersections张晗钰No ratings yet
- Sensors 22 07501Document14 pagesSensors 22 07501omar aliNo ratings yet
- Conference WONS23hjkilDocument8 pagesConference WONS23hjkilnujithra.kesavanNo ratings yet
- Dynamic Resource Reservation Based Collision and Deadlock Prevention For Multi-AGVsDocument12 pagesDynamic Resource Reservation Based Collision and Deadlock Prevention For Multi-AGVsIchiware StoreNo ratings yet
- Formation Control For Multiple Connected and AutomDocument6 pagesFormation Control For Multiple Connected and AutomErickson OngNo ratings yet
- An Ecological Adaptive Cruise Control For Mixed Traffic and Its Stabilization EffectDocument11 pagesAn Ecological Adaptive Cruise Control For Mixed Traffic and Its Stabilization EffectS AbrarNo ratings yet
- Effect of Signal Coordination On The Traffic Operation of Urban CorridorDocument12 pagesEffect of Signal Coordination On The Traffic Operation of Urban CorridorZainab A. AbdulstaarNo ratings yet
- A Lane Merge Coordination Model For A V2X Scenario: Luis Sequeira, Adam Szefer, Jamie Slome and Toktam MahmoodiDocument6 pagesA Lane Merge Coordination Model For A V2X Scenario: Luis Sequeira, Adam Szefer, Jamie Slome and Toktam Mahmoodiمصعب جاسمNo ratings yet
- A Platoon Based Cooperative Eco-Driving Model For Mixed Automated and Human-Driven Vehicles at A Signalised IntersectionDocument20 pagesA Platoon Based Cooperative Eco-Driving Model For Mixed Automated and Human-Driven Vehicles at A Signalised Intersection张晗钰No ratings yet
- IJCAI TransportationDocument5 pagesIJCAI TransportationAhmed WadeNo ratings yet
- Machines 12 00165Document18 pagesMachines 12 00165jamel-shamsNo ratings yet
- Biomimetics 09 00125Document18 pagesBiomimetics 09 00125Trần Mỹ LiênNo ratings yet
- Accident Analysis and Prevention: SciencedirectDocument11 pagesAccident Analysis and Prevention: Sciencedirectnikky72No ratings yet
- V2I-Aided Platooning Systems With Delay AwarenessDocument12 pagesV2I-Aided Platooning Systems With Delay AwarenessMichal MagulaNo ratings yet
- 1 s2.0 S0743731522000636 MainDocument14 pages1 s2.0 S0743731522000636 MainVinniNo ratings yet
- A Vehicle-To-Infrastructure Communication Based Algorithm For Urban Traffic ControlDocument6 pagesA Vehicle-To-Infrastructure Communication Based Algorithm For Urban Traffic ControlPrīncess NōOrNo ratings yet
- Development of A Signal-Free Intersection Control System For CAVs and Corridor Level Impact AssessmentDocument16 pagesDevelopment of A Signal-Free Intersection Control System For CAVs and Corridor Level Impact AssessmentChristian Kyle BeltranNo ratings yet
- 1 s2.0 S0968090X23001808 MainDocument23 pages1 s2.0 S0968090X23001808 MainOnat KeskinNo ratings yet
- Enhanced Spring Clustering in Vanets With Obstruction ConsiderationsDocument6 pagesEnhanced Spring Clustering in Vanets With Obstruction ConsiderationsRajkumar JainNo ratings yet
- Robust Network-Wide Bus Scheduling With Transfer SynchronizationsDocument11 pagesRobust Network-Wide Bus Scheduling With Transfer SynchronizationsLiangbin cuiNo ratings yet
- Polling-Systems-Based Autonomous Vehicle Coordination in Traffic Intersections With No Traffic SignalsDocument15 pagesPolling-Systems-Based Autonomous Vehicle Coordination in Traffic Intersections With No Traffic Signals2331600No ratings yet
- Autonomous Vehicle Platoons in Urban Road Networks A Joint Distributed Reinforcement Learning and Model Predictive Control ApproachDocument16 pagesAutonomous Vehicle Platoons in Urban Road Networks A Joint Distributed Reinforcement Learning and Model Predictive Control Approachthanhtan_tvuNo ratings yet
- Sustainability 15 01381 v3Document11 pagesSustainability 15 01381 v3Michael Quispe BasilioNo ratings yet
- Mice 12702Document20 pagesMice 12702Vismar OchoaNo ratings yet
- 1 s2.0 S0045790622006863 MainDocument15 pages1 s2.0 S0045790622006863 Mainroi.ho2706No ratings yet
- V2X Communication Between CAVs and UAVsDocument11 pagesV2X Communication Between CAVs and UAVsJohn SmithNo ratings yet
- Moose Test PaperDocument21 pagesMoose Test PaperAbdul Ahad MokhtarNo ratings yet
- Citation Distributed MPC For Multi-Vehicle Systems Moving in FormationDocument12 pagesCitation Distributed MPC For Multi-Vehicle Systems Moving in FormationTony Y.No ratings yet
- IET Intelligent Trans Sys - 2020 - Wang - Longitudinal and Lateral Control of Autonomous Vehicles in Multi Vehicle DrivingDocument13 pagesIET Intelligent Trans Sys - 2020 - Wang - Longitudinal and Lateral Control of Autonomous Vehicles in Multi Vehicle Drivingtensazangetsu691No ratings yet
- Cooperative Driving of Automated Vehicles Using B-Splines For Trajectory PlanningDocument11 pagesCooperative Driving of Automated Vehicles Using B-Splines For Trajectory PlanningMostafa GhajarNo ratings yet
- Connected Autonomous Vehicles For Improving Mixed Traffic Efficiency in Unsignalized IntersectionDocument5 pagesConnected Autonomous Vehicles For Improving Mixed Traffic Efficiency in Unsignalized IntersectionMohammed ArshadNo ratings yet
- Integrated Variable Speed Limits and Lane-Changing Control For Freeway Lane-Drop BottlenecksDocument12 pagesIntegrated Variable Speed Limits and Lane-Changing Control For Freeway Lane-Drop BottlenecksRio DandyNo ratings yet
- Supply Chain Analytics - 19mia1102Document6 pagesSupply Chain Analytics - 19mia1102Bandi Rajesh Reddy 19MIA1102No ratings yet
- Research Article: A Study On Vehicle Connectivity For Vanets Adopting Beamforming Antenna ArrayDocument7 pagesResearch Article: A Study On Vehicle Connectivity For Vanets Adopting Beamforming Antenna ArrayTanveer AhmadNo ratings yet
- 1 s2.0 S2666546821000641 MainDocument9 pages1 s2.0 S2666546821000641 MainSidharth MaheshNo ratings yet
- The Adaptive Recommendation Segment Mechanism To Reduce Traffic Congestion in Smart CityDocument4 pagesThe Adaptive Recommendation Segment Mechanism To Reduce Traffic Congestion in Smart Citymohamed salamaNo ratings yet
- Composite Platoon Trajectory Planning Strategy For Intersection Throughput MaximizationDocument15 pagesComposite Platoon Trajectory Planning Strategy For Intersection Throughput Maximization张晗钰No ratings yet
- A System Dynamics Model For Routing and Scheduling of Cross-Dock and Transportation in Reverse Logistics Network of Perishable GoodsDocument17 pagesA System Dynamics Model For Routing and Scheduling of Cross-Dock and Transportation in Reverse Logistics Network of Perishable GoodsabuchoriNo ratings yet
- No 7Document29 pagesNo 7Dana Marsetiya UtamaNo ratings yet
- ACC 2018 FinalDocument7 pagesACC 2018 Finalliubwin2000No ratings yet
- IET Smart Cities - 2024 - Kong - A Comprehensive High Level Automated Driving Assistance System With IntegratedDocument15 pagesIET Smart Cities - 2024 - Kong - A Comprehensive High Level Automated Driving Assistance System With Integrated5stxtvgpzfNo ratings yet
- An Integrated Ride Matching and Vehicle Rebalancing M 2023 Computers OperaDocument15 pagesAn Integrated Ride Matching and Vehicle Rebalancing M 2023 Computers OperaSoumojit KumarNo ratings yet
- Learning Eco-Driving Strategies at Signalized InteDocument9 pagesLearning Eco-Driving Strategies at Signalized InteAbdelRahman SamahaNo ratings yet
- Unsupervised Lane-Change Identification For On-RamDocument8 pagesUnsupervised Lane-Change Identification For On-RamErickson OngNo ratings yet
- Transportation Research Part C: Qiangqiang Guo, Li Li, Xuegang (Jeff) BanDocument22 pagesTransportation Research Part C: Qiangqiang Guo, Li Li, Xuegang (Jeff) Banion cioriciNo ratings yet
- Speed and Heading Control-Based Collision Avoidance For A Ship Towing SystemDocument14 pagesSpeed and Heading Control-Based Collision Avoidance For A Ship Towing SystemAhmad luthfi asrorNo ratings yet
- A Hybrid Genetic Algorithm On Routing and Scheduling For Vehicle-Assisted Multi-Drone Parcel DeliveryDocument10 pagesA Hybrid Genetic Algorithm On Routing and Scheduling For Vehicle-Assisted Multi-Drone Parcel DeliveryThalapathy VijayNo ratings yet
- Neural Network Surrogate Models For Aerodynamic Analysis in Truck Platoons Implications On Autonomous Freight DeliveryDocument10 pagesNeural Network Surrogate Models For Aerodynamic Analysis in Truck Platoons Implications On Autonomous Freight DeliveryrublasterNo ratings yet
- NeginRahnamaei 3Document12 pagesNeginRahnamaei 3Negin RahNo ratings yet
- Yu and Shen (2020)Document10 pagesYu and Shen (2020)wyp2414305315No ratings yet
- Turning the Right Corner: Ensuring Development through a Low-Carbon Transport SectorFrom EverandTurning the Right Corner: Ensuring Development through a Low-Carbon Transport SectorNo ratings yet
- Wa0003.Document1 pageWa0003.noam890988No ratings yet
- 2017 Marble Falls Soapbox Classic Racing RulesDocument3 pages2017 Marble Falls Soapbox Classic Racing Rulescphammond83No ratings yet
- Case Study Isbt 43Document26 pagesCase Study Isbt 43Sakshi RawatNo ratings yet
- Truck Ban MMDA - OdtDocument13 pagesTruck Ban MMDA - Odtトレンティーノ アップルNo ratings yet
- Transit Pre Flight Task Card Issue 02 (ATR 72-212A)Document6 pagesTransit Pre Flight Task Card Issue 02 (ATR 72-212A)Rahul Unnikrishnan100% (1)
- Road Transport: Berlin (/bɜ R Lɪn/ BurDocument14 pagesRoad Transport: Berlin (/bɜ R Lɪn/ BurSandeep Madhusudan SahooNo ratings yet
- Automated Assembling of Electric Motors With Hairpin Technology - LowDocument2 pagesAutomated Assembling of Electric Motors With Hairpin Technology - Lowjianfeng wangNo ratings yet
- Boeing 737-800 - Mexicana de Aviacion - 1 100Document12 pagesBoeing 737-800 - Mexicana de Aviacion - 1 100shinoypuntoNo ratings yet
- Zaher Flight To IstanbulDocument1 pageZaher Flight To IstanbulSaleh Saafan7No ratings yet
- MSRTC TicketDocument1 pageMSRTC TicketJaydeep PatilNo ratings yet
- 4wd SystemDocument31 pages4wd SystemManuales Transmisiones AutomaticasNo ratings yet
- ALDAR OSH EHS Alert - Common Hazards Associated With Tipper Truck OperationsDocument1 pageALDAR OSH EHS Alert - Common Hazards Associated With Tipper Truck OperationsVenkadesh Periathambi100% (2)
- Introduction To Aerospace Engineering AER 1110: Airplane Structure SystemDocument51 pagesIntroduction To Aerospace Engineering AER 1110: Airplane Structure SystemAhmed abdelgalilNo ratings yet
- Causes and Effects of UrbanizationDocument9 pagesCauses and Effects of UrbanizationHIRA SHABBIR100% (2)
- Licensing Case Studies - Tourism Sector (Final)Document75 pagesLicensing Case Studies - Tourism Sector (Final)MBASTUDENTPUPNo ratings yet
- FMVSS 203Document2 pagesFMVSS 203Tomáš RybaNo ratings yet
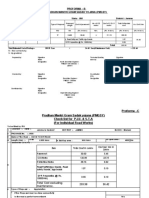
- Proforma - B Pradhan Mantri Gram Sadak Yojana (Pmgsy) : Package Summary Package No:-JK05 - State: - J&K District: JammuDocument40 pagesProforma - B Pradhan Mantri Gram Sadak Yojana (Pmgsy) : Package Summary Package No:-JK05 - State: - J&K District: JammuTarun GuptaNo ratings yet
- Puhinui Station Auckland Transport Paper 2018Document19 pagesPuhinui Station Auckland Transport Paper 2018Ben RossNo ratings yet
- SBSVDocument11 pagesSBSVFERNANDO TORQUATO LEITENo ratings yet
- REGIONAL TRANSPORTATION DISTRICT Standard Drawings PDFDocument96 pagesREGIONAL TRANSPORTATION DISTRICT Standard Drawings PDFİlker Yılmaz TürkerNo ratings yet
- Faculty of Business and Communication: SMP 32203 Supply Chain Management Year 2 Semester 2 2022/2023Document11 pagesFaculty of Business and Communication: SMP 32203 Supply Chain Management Year 2 Semester 2 2022/2023Song ZechariahNo ratings yet
- New War of Currents Case Study SolutionDocument4 pagesNew War of Currents Case Study SolutionAkshat ChauhanNo ratings yet
- Panel 2 - Greener Is BetterDocument7 pagesPanel 2 - Greener Is BetterOliwia PierzgalskaNo ratings yet
- Traffic Control DevicesDocument5 pagesTraffic Control DevicesDIMariaAUnitedNo ratings yet
- Golf-Vii-Pa-Pricelist (EFFECTIVE FROM 23.5.2019) PDFDocument58 pagesGolf-Vii-Pa-Pricelist (EFFECTIVE FROM 23.5.2019) PDFAnonymous IbtxGd7my20% (1)
- Delhi Metro Rail Corporation LTDDocument7 pagesDelhi Metro Rail Corporation LTDGaurav RajwarNo ratings yet
- CruzeDocument2 pagesCruzeParthi GovinNo ratings yet
- 97F 53motorhomeDocument224 pages97F 53motorhomerukford1No ratings yet