Download as pdf or txt
You might also like
- Cs229 Midterm Aut2015Document21 pagesCs229 Midterm Aut2015JMDP5No ratings yet
- Stanford University CS 229, Autumn 2014 Midterm ExaminationDocument23 pagesStanford University CS 229, Autumn 2014 Midterm ExaminationErico ArchetiNo ratings yet
- Practice Midterm 2 SolDocument26 pagesPractice Midterm 2 SolZeeshan Ali SayyedNo ratings yet
- Play Based ExplorationGuideDocument52 pagesPlay Based ExplorationGuideRashid Ahmedov100% (1)
- Chapter 4a Riskmin-Reg - Commented4Document54 pagesChapter 4a Riskmin-Reg - Commented4DreamlessNo ratings yet
- Chapter 04b Riskmin-Class - Commented2Document30 pagesChapter 04b Riskmin-Class - Commented2DreamlessNo ratings yet
- Chapter 5 Univariate-ModellingDocument81 pagesChapter 5 Univariate-ModellingDreamlessNo ratings yet
- ML 2022 Sheet 03Document1 pageML 2022 Sheet 03dummyNo ratings yet
- Fixed Points For Multivalued Contractions in B-Metric Spaces With Applications To FractalsDocument12 pagesFixed Points For Multivalued Contractions in B-Metric Spaces With Applications To FractalsBrenton MorrisonNo ratings yet
- Stanford University CS 229, Autumn 2015 Midterm ExaminationDocument25 pagesStanford University CS 229, Autumn 2015 Midterm ExaminationZeeshan Ali SayyedNo ratings yet
- Chapter 5 - Excursion B-Splines - Commented2Document47 pagesChapter 5 - Excursion B-Splines - Commented2DreamlessNo ratings yet
- Computational Statistics: Simulation of Probability Distributions: Classical MethodsDocument35 pagesComputational Statistics: Simulation of Probability Distributions: Classical MethodsAchraf K-MoreNo ratings yet
- Multivariate Probability: 1 Discrete Joint DistributionsDocument10 pagesMultivariate Probability: 1 Discrete Joint DistributionshamkarimNo ratings yet
- 2223hk1 Slide02 ML2022Document34 pages2223hk1 Slide02 ML2022san crisNo ratings yet
- Mathematics - I-Subsidiary Course Code: MATH123: Dr. Sumit Kaur Bhatia Skbhatia@amity - EduDocument18 pagesMathematics - I-Subsidiary Course Code: MATH123: Dr. Sumit Kaur Bhatia Skbhatia@amity - EduMitesh KumarNo ratings yet
- Machine Learning Assignment 1 Basic Concepts: Due: 27 March 2015, 15:00pmDocument3 pagesMachine Learning Assignment 1 Basic Concepts: Due: 27 March 2015, 15:00pmpasomagaNo ratings yet
- A Bayesian Perspective On Generalization and Stochastic Gradient DescentDocument4 pagesA Bayesian Perspective On Generalization and Stochastic Gradient DescentRahul MishraNo ratings yet
- Assignment2 PDFDocument2 pagesAssignment2 PDFlaraNo ratings yet
- BayesianCourse - Session13 (Ajuste Bayesiano)Document16 pagesBayesianCourse - Session13 (Ajuste Bayesiano)Luis PinedaNo ratings yet
- ML 2022 Sheet 02Document2 pagesML 2022 Sheet 02dummyNo ratings yet
- cs228 HW 1Document6 pagescs228 HW 1AnnieNo ratings yet
- A Generalized Common Fixed Point of Multi-Valued Maps in B-Metric SpaceDocument10 pagesA Generalized Common Fixed Point of Multi-Valued Maps in B-Metric SpaceBrenton MorrisonNo ratings yet
- Assign 1Document5 pagesAssign 1darkmanhiNo ratings yet
- Naïve Bayes Classifier: April 25, 2006Document19 pagesNaïve Bayes Classifier: April 25, 2006aaminjNo ratings yet
- 3 Bayesian Deep LearningDocument33 pages3 Bayesian Deep LearningNishanth ManikandanNo ratings yet
- Extension Principle Hand OutDocument31 pagesExtension Principle Hand OutbaydarbasarNo ratings yet
- Statistical Learning MethodsDocument28 pagesStatistical Learning MethodsGomathi ShanmugamNo ratings yet
- Homework 1 - Theoretical Part: IFT 6390 Fundamentals of Machine Learning Ioannis MitliagkasDocument6 pagesHomework 1 - Theoretical Part: IFT 6390 Fundamentals of Machine Learning Ioannis MitliagkasRochak AgarwalNo ratings yet
- CS 229, Summer 2020 Problem Set #1Document14 pagesCS 229, Summer 2020 Problem Set #1nhungNo ratings yet
- ML Section14 GMM emDocument53 pagesML Section14 GMM emdummyNo ratings yet
- Entropy 22 00603 v3Document18 pagesEntropy 22 00603 v3Ahmed FenneurNo ratings yet
- Lectures 1Document98 pagesLectures 1Shy RonnieNo ratings yet
- E9 205 - Machine Learning For Signal Processing: Practice For Midterm Exam # 1Document8 pagesE9 205 - Machine Learning For Signal Processing: Practice For Midterm Exam # 1Uday GulghaneNo ratings yet
- Midterm 2014Document23 pagesMidterm 2014Zeeshan Ali SayyedNo ratings yet
- Bayesian Decision Theory and Learning: Jayanta Mukhopadhyay Dept. of Computer Science and EnggDocument56 pagesBayesian Decision Theory and Learning: Jayanta Mukhopadhyay Dept. of Computer Science and EnggUtkarsh PatelNo ratings yet
- Variationaal Inequalities Approaches To Minimization Problems With Constraints of Generalized Mixed Eequilibria and Variational InclusionDocument20 pagesVariationaal Inequalities Approaches To Minimization Problems With Constraints of Generalized Mixed Eequilibria and Variational InclusionSIDDHARTH MITRANo ratings yet
- Lecture 19Document9 pagesLecture 19B SRINATH ACHARYNo ratings yet
- ML 2022 Sheet 05Document2 pagesML 2022 Sheet 05dummyNo ratings yet
- Denoising Autoencoders tr1316Document16 pagesDenoising Autoencoders tr1316penetsNo ratings yet
- Dempster-Shafer's Basic Probability Assignment Based On Fuzzy Membership FunctionsDocument9 pagesDempster-Shafer's Basic Probability Assignment Based On Fuzzy Membership Functionshenri joel jrNo ratings yet
- Learning From Data: 5: The Linear ModelDocument49 pagesLearning From Data: 5: The Linear ModelHamed AryanfarNo ratings yet
- Recitation Decision Trees Adaboost 02-09-2006Document30 pagesRecitation Decision Trees Adaboost 02-09-2006Dany AlbaNo ratings yet
- ML 2022 Sheet 04Document2 pagesML 2022 Sheet 04dummyNo ratings yet
- University of Edinburgh College of Science and Engineering School of InformaticsDocument5 pagesUniversity of Edinburgh College of Science and Engineering School of InformaticsfusionNo ratings yet
- Lecture 4Document42 pagesLecture 4Vishal kumar SawNo ratings yet
- Ch2 Supervised LearningDocument17 pagesCh2 Supervised LearningRikiNo ratings yet
- CS 229, Autumn 2017 Problem Set #2: Supervised Learning IIDocument6 pagesCS 229, Autumn 2017 Problem Set #2: Supervised Learning IInxp HeNo ratings yet
- 10.3934 Math.2022456 (2022)Document18 pages10.3934 Math.2022456 (2022)Muhammad NazamNo ratings yet
- Lecture 2: Gibb's, Data Processing and Fano's Inequalities: 2.1.1 Fundamental Limits in Information TheoryDocument6 pagesLecture 2: Gibb's, Data Processing and Fano's Inequalities: 2.1.1 Fundamental Limits in Information TheoryAbhishek PrakashNo ratings yet
- Homework 1Document7 pagesHomework 1Muhammad MurtazaNo ratings yet
- Ps 1Document5 pagesPs 1Emre UysalNo ratings yet
- AssigmentsDocument12 pagesAssigmentsShakuntala Khamesra100% (1)
- PSet 8Document2 pagesPSet 8Alexander QuNo ratings yet
- Midterm SolutionDocument6 pagesMidterm SolutionbrsbyrmNo ratings yet
- SGM With Random FeaturesDocument25 pagesSGM With Random Featuresidan kahanNo ratings yet
- HW3Document2 pagesHW3SNo ratings yet
- Information Theory and Machine LearningDocument21 pagesInformation Theory and Machine Learninghoai_thu_15No ratings yet
- Bayesian Learning: Berrin YanikogluDocument64 pagesBayesian Learning: Berrin YanikogluRabia Babar KhanNo ratings yet
- Reading List 2020 21Document8 pagesReading List 2020 21septian_bbyNo ratings yet
- MidtermDocument1 pageMidterm孫利東No ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Chapter 5 - Excursion B-Splines - Commented2Document47 pagesChapter 5 - Excursion B-Splines - Commented2DreamlessNo ratings yet
- Chapter 5 Univariate-ModellingDocument81 pagesChapter 5 Univariate-ModellingDreamlessNo ratings yet
- Chapter 4a Riskmin-Reg - Commented4Document54 pagesChapter 4a Riskmin-Reg - Commented4DreamlessNo ratings yet
- Chapter 04b Riskmin-Class - Commented2Document30 pagesChapter 04b Riskmin-Class - Commented2DreamlessNo ratings yet
- 02-Classification - Commented2Document22 pages02-Classification - Commented2DreamlessNo ratings yet
- 100 cau tim loi saiDocument2 pages100 cau tim loi saibuibambooNo ratings yet
- Hearing Loss - Types, Degree and ConfigurationDocument2 pagesHearing Loss - Types, Degree and ConfigurationNicoleAlexandraNo ratings yet
- Adobe Corporate Office, NoidaDocument7 pagesAdobe Corporate Office, NoidaChaahat SoniNo ratings yet
- NO Nama Notar KelasDocument14 pagesNO Nama Notar KelastyasNo ratings yet
- Aakash Set1 AnsDocument40 pagesAakash Set1 AnsDivya VatsaNo ratings yet
- Advance Material - Concrewall PDFDocument22 pagesAdvance Material - Concrewall PDFPalvi VaidyaNo ratings yet
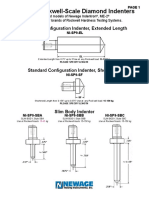
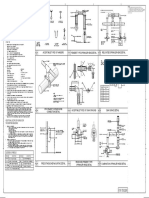
- Custom Rockwell Scale Diamond IndentersDocument2 pagesCustom Rockwell Scale Diamond IndentersDiego SilvaNo ratings yet
- For Tender: NotesDocument5 pagesFor Tender: NotesTeam RelentlessNo ratings yet
- Advanced Soil Mechanics PDFDocument272 pagesAdvanced Soil Mechanics PDFDjordje RaljicNo ratings yet
- Paper Endapan MineralDocument14 pagesPaper Endapan MineralMuplihan Komi TararapNo ratings yet
- Suzlon S95 - 2.1 MW Receives Type Certification Delivers 102% of Estimated Power CurveDocument2 pagesSuzlon S95 - 2.1 MW Receives Type Certification Delivers 102% of Estimated Power CurveAdriano MunizNo ratings yet
- BV422 Pressure Reducing-Sustaining ValveDocument4 pagesBV422 Pressure Reducing-Sustaining ValveFAIYAZ AHMEDNo ratings yet
- CTS-V Conversion PDFDocument7 pagesCTS-V Conversion PDFAnonymous XbqU3gYDmNo ratings yet
- (Routledge Handbooks) Rahman, Mohammad Sajjadur - Riaz, Ali - Routledge Handbook of Contemporary Bangladesh-Taylor & Francis LTD (2016)Document469 pages(Routledge Handbooks) Rahman, Mohammad Sajjadur - Riaz, Ali - Routledge Handbook of Contemporary Bangladesh-Taylor & Francis LTD (2016)Aparajita RoyNo ratings yet
- Osama Khedr Mohamed Hanafy: AddressDocument3 pagesOsama Khedr Mohamed Hanafy: AddressKhalid HafezNo ratings yet
- Rajiv Gandhi University of Knowledge Technologies, BasarDocument3 pagesRajiv Gandhi University of Knowledge Technologies, BasarAMRUTHWAR SWAROOPANo ratings yet
- Drop Bomb Dummy MK1 USA 1918Document9 pagesDrop Bomb Dummy MK1 USA 1918FrancescoNo ratings yet
- Geosoft - Exploring With Data - TargetDocument7 pagesGeosoft - Exploring With Data - TargetkataukongNo ratings yet
- Achievement Test T.L.E Grade 9Document7 pagesAchievement Test T.L.E Grade 9Paul Gian Urrutia100% (2)
- Course Outline ParasitologyDocument6 pagesCourse Outline ParasitologyNichole SilverioNo ratings yet
- W. B. Yeats Memoirs AutobiographyDocument316 pagesW. B. Yeats Memoirs Autobiographynalpas80% (5)
- (VonRoll) Windings Wire PDFDocument24 pages(VonRoll) Windings Wire PDFNicolás Felipe Reyes CerdaNo ratings yet
- In Philips Professional LED Lighting Catalogue 2012Document94 pagesIn Philips Professional LED Lighting Catalogue 2012theseusgarcia1100% (1)
- Hartley PDFDocument226 pagesHartley PDFRocky AgustyaNo ratings yet
- Solution Manual For Project Management A Systems Approach To Planning Scheduling and Controlling 11th Edition Harold R KerznerDocument34 pagesSolution Manual For Project Management A Systems Approach To Planning Scheduling and Controlling 11th Edition Harold R Kerznerhardnessoutsleepkvuyj100% (16)
- Pc30Mr Pc35Mr: Compact Hydraulic ExcavatorDocument20 pagesPc30Mr Pc35Mr: Compact Hydraulic ExcavatorWarunaNo ratings yet
- The Stay Alive GuideDocument82 pagesThe Stay Alive GuideTaylor PiersonNo ratings yet
- Lecture-04 Maintenance of Rotatory and Stationary EquipmentDocument38 pagesLecture-04 Maintenance of Rotatory and Stationary EquipmentMohammad ShafiNo ratings yet
- Data Sheet For Special Check Valve (Non-Slam) : Dahej Petrochemical ComplexDocument2 pagesData Sheet For Special Check Valve (Non-Slam) : Dahej Petrochemical ComplexSteve WanNo ratings yet