Download as pdf or txt
You might also like
- Electronics For Electricians 7th Edition Herman Solutions ManualDocument13 pagesElectronics For Electricians 7th Edition Herman Solutions Manuallaurenstarkntmkfdjrqz100% (13)
- 100 Top Analog Electronics Questions and Answers PDF Analog Electronics QuestionsDocument8 pages100 Top Analog Electronics Questions and Answers PDF Analog Electronics QuestionsRavi Raj100% (1)
- APS Dynamics, 114 Dual Amplifier, 380W 0-2kHz PDFDocument15 pagesAPS Dynamics, 114 Dual Amplifier, 380W 0-2kHz PDFLulu Sweet ThingNo ratings yet
- Lica Unit2Document59 pagesLica Unit2Sri Prakash NarayanamNo ratings yet
- Design With Linear Integrated Circuits Experiment No: 1Document11 pagesDesign With Linear Integrated Circuits Experiment No: 1Nilesh SinghNo ratings yet
- Op Amp PresentationDocument23 pagesOp Amp PresentationAnonymous GTIfWmmENo ratings yet
- FALLSEM2018-19 - EEE3002 - ETH - TT423 - VL2018191002681 - Reference Material I - EEE 3002 - SlidesDocument56 pagesFALLSEM2018-19 - EEE3002 - ETH - TT423 - VL2018191002681 - Reference Material I - EEE 3002 - SlidesGG BENo ratings yet
- Operational Amplifier Study Notes For RRB Je SSC Je B6d5da06Document11 pagesOperational Amplifier Study Notes For RRB Je SSC Je B6d5da06yogi427No ratings yet
- 32792222Document193 pages32792222ajit704687No ratings yet
- Opamp PPT For Engineering First Year StudentsDocument33 pagesOpamp PPT For Engineering First Year Studentsdarshankumar999No ratings yet
- Analog IC CourseDocument167 pagesAnalog IC CourseAmitNo ratings yet
- EE 174 Fall 2019: Operational AmplifiersDocument36 pagesEE 174 Fall 2019: Operational AmplifiersKavyashreeMNo ratings yet
- Unit 2-2Document6 pagesUnit 2-2sivamuppalaneni29No ratings yet
- Opamp Midterm 1Document60 pagesOpamp Midterm 1Mohit ShuklaNo ratings yet
- DataDocument13 pagesDatathermoelectric C.ANo ratings yet
- Op-Amp Parameters: Input Bias CurrentDocument31 pagesOp-Amp Parameters: Input Bias CurrentMs. Bhavini KumawatNo ratings yet
- Unit 4 Opamp PDFDocument19 pagesUnit 4 Opamp PDFkrishna soniNo ratings yet
- Low Input Current Photodarlington Coupler: Features DescriptionDocument15 pagesLow Input Current Photodarlington Coupler: Features DescriptionStuxnetNo ratings yet
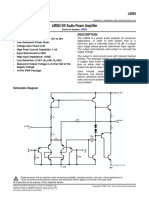
- LM384Document12 pagesLM384Luis TorresNo ratings yet
- LM - 384 PDFDocument11 pagesLM - 384 PDFDaniel Arcia JiménezNo ratings yet
- ALM-11036 - Planned Datasheet Rev1.0Document13 pagesALM-11036 - Planned Datasheet Rev1.0biastee7690No ratings yet
- Datasheet ECM 5658 Analog 4pgv1 A80501 PressDocument4 pagesDatasheet ECM 5658 Analog 4pgv1 A80501 Presslgreilly4No ratings yet
- Characteristics Curve For Practical Op-Amp & Basic of MultivibratorDocument35 pagesCharacteristics Curve For Practical Op-Amp & Basic of MultivibratorMy NotesNo ratings yet
- Operational AmplifierDocument5 pagesOperational Amplifiermanojkumar9No ratings yet
- Analog Circuits: A. A. Lande, E & TC DeptDocument96 pagesAnalog Circuits: A. A. Lande, E & TC DeptvmspraneethNo ratings yet
- Operational Amplifiers Basics, Characteristics, Types and ApplicationsDocument14 pagesOperational Amplifiers Basics, Characteristics, Types and ApplicationsSanjay BalwaniNo ratings yet
- Chapter 3 - Operational AmplifierDocument72 pagesChapter 3 - Operational AmplifierMOHAMMAD BANIN ISMANo ratings yet
- NMG Catalog 9AKK2017-109096 RevB EN 05-2019 LowresDocument20 pagesNMG Catalog 9AKK2017-109096 RevB EN 05-2019 Lowresvogid38712No ratings yet
- remote-multipurpose-io-module-rmp420Document2 pagesremote-multipurpose-io-module-rmp420313961848No ratings yet
- Lic Lab Manual FinyalDocument50 pagesLic Lab Manual FinyalAryan TejanNo ratings yet
- Introduction, PD & BridgeDocument14 pagesIntroduction, PD & BridgeFiery GryphonNo ratings yet
- CT1248-A2-RC: Current TransformerDocument2 pagesCT1248-A2-RC: Current Transformersaeed.shadmehri75No ratings yet
- OPAMP BishawnathDocument27 pagesOPAMP BishawnathAsheque IqbalNo ratings yet
- Operational AmplifiersDocument17 pagesOperational AmplifiersSukriti MugdhaNo ratings yet
- Design and Layout of 1.8V Two Stage CMOS Operational Amplifier (Unbuffered)Document5 pagesDesign and Layout of 1.8V Two Stage CMOS Operational Amplifier (Unbuffered)sudarshan poojaryNo ratings yet
- Analog Integrated Circuits LAB ManualDocument51 pagesAnalog Integrated Circuits LAB ManualVishurockNo ratings yet
- Operational AmplifiersDocument49 pagesOperational Amplifiersangelo rodriguezNo ratings yet
- Model Viva Questions For "Analog Electronics"Document24 pagesModel Viva Questions For "Analog Electronics"profmns100% (1)
- LICDocument33 pagesLICRavi RathodNo ratings yet
- Presentation Op Amp Till 16.01.2024Document32 pagesPresentation Op Amp Till 16.01.2024Harsh AgarwalNo ratings yet
- APW7142Document22 pagesAPW7142gsmaster4141No ratings yet
- Basics of OpampDocument29 pagesBasics of OpampPrakash Velayudham VNo ratings yet
- Lic QB - 2 Marks Unit I & IiDocument7 pagesLic QB - 2 Marks Unit I & Iisanthosh sekarNo ratings yet
- ALM-11036 - Planned Datasheet Rev1.3Document13 pagesALM-11036 - Planned Datasheet Rev1.3biastee7690No ratings yet
- Characteristics of Ideal Op-AmpDocument14 pagesCharacteristics of Ideal Op-AmpShubham MannaNo ratings yet
- OpAmp PDFDocument98 pagesOpAmp PDFAbhishek BahmaniNo ratings yet
- Surge GeneratorDocument5 pagesSurge Generatorpawan kumar raiNo ratings yet
- Dec005000 2016Document9 pagesDec005000 2016Adiyatma DjatnikaNo ratings yet
- LdicDocument27 pagesLdicSri ChandanaNo ratings yet
- Course Plan Unit - I: No(s) Key-Words ObjectivesDocument34 pagesCourse Plan Unit - I: No(s) Key-Words ObjectivesGauthiNo ratings yet
- Description: AC Input Dual OptocouplerDocument4 pagesDescription: AC Input Dual OptocouplerraveendraNo ratings yet
- ENHPDocument2 pagesENHPEddy SanchezNo ratings yet
- I 87017RCWDocument2 pagesI 87017RCWjuraNo ratings yet
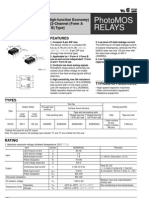
- NAIS DatasheetDocument3 pagesNAIS Datasheetshinning.amar5336No ratings yet
- 16 - Introduction To Signal ConditioningDocument32 pages16 - Introduction To Signal ConditioningKARTHIK S SNo ratings yet
- Magnetic Flow E&HDocument20 pagesMagnetic Flow E&HThanachai TengjirathanapaNo ratings yet
- Unit 2: Definition of IcDocument26 pagesUnit 2: Definition of Icsai kiranNo ratings yet
- lm6142 2Document29 pageslm6142 2clkent2022No ratings yet
- LM 6142Document30 pagesLM 6142شادي العمرNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Boat Maintenance Companions: Electrics & Diesel Companions at SeaFrom EverandBoat Maintenance Companions: Electrics & Diesel Companions at SeaNo ratings yet
- EC8453-Linear Integrated Circuits Department of ECE 2018-19Document26 pagesEC8453-Linear Integrated Circuits Department of ECE 2018-19senNo ratings yet
- High Performance, Bifet Operational Amplifiers Ad542/Ad544/Ad547Document12 pagesHigh Performance, Bifet Operational Amplifiers Ad542/Ad544/Ad547selocaNo ratings yet
- OP AmpsDocument13 pagesOP AmpsGepel OntanillasNo ratings yet
- ELEXDocument32 pagesELEXJmae BantilingNo ratings yet
- Synthetic-Ripple Modulator For Synchronous Buck ConverterDocument4 pagesSynthetic-Ripple Modulator For Synchronous Buck ConverterBishoo ShenoudaNo ratings yet
- Unit 2Document16 pagesUnit 2danishmaniNo ratings yet
- Dual 8-,10-,12-Bit High Bandwidth Multiplying Dacs With Serial Interface Ad5429/Ad5439/Ad5449Document32 pagesDual 8-,10-,12-Bit High Bandwidth Multiplying Dacs With Serial Interface Ad5429/Ad5439/Ad5449selocaNo ratings yet
- ASK Modulation PDFDocument4 pagesASK Modulation PDFjugal suggalaNo ratings yet
- A Low Cost Automastic Impedance BridgeDocument4 pagesA Low Cost Automastic Impedance Bridgedavorko_tNo ratings yet
- NptelDocument15 pagesNptelHarpreet SharmaNo ratings yet
- Ecelx31l Activity 1Document8 pagesEcelx31l Activity 1buri ket tamNo ratings yet
- AM5766Document10 pagesAM5766Kanthan Kanth0% (1)
- An 9737Document13 pagesAn 9737indah marthaNo ratings yet
- Si PD Circuit eDocument4 pagesSi PD Circuit eMichael MitchellNo ratings yet
- LDIC Word NewDocument221 pagesLDIC Word NewTarun PrasadNo ratings yet
- LM 3875Document22 pagesLM 3875iskarupNo ratings yet
- 1 - Burr-Brown App Note CompilationDocument813 pages1 - Burr-Brown App Note CompilationErmias Mesfin100% (2)
- 3.1 Operational Amplifiers-1Document142 pages3.1 Operational Amplifiers-1Ex6TenZNo ratings yet
- (Gray Meyer) Analysis and Design of Analog Integrated Circuits 5th CroppedDocument60 pages(Gray Meyer) Analysis and Design of Analog Integrated Circuits 5th CroppedvishalwinsNo ratings yet
- Chapter - 04 OscillatorsDocument46 pagesChapter - 04 OscillatorsBushra MamoudNo ratings yet
- Fastfet Op Amps: Low Cost, 80 MHZ Ad8033/Ad8034Document24 pagesFastfet Op Amps: Low Cost, 80 MHZ Ad8033/Ad8034dinaeroNo ratings yet
- CH 2 - Op-Amp ApplicationDocument52 pagesCH 2 - Op-Amp Applicationknighthood4all100% (3)
- Advance ElectronicsDocument8 pagesAdvance ElectronicswazidulNo ratings yet
- r19 Cse Syllabus UpdatedDocument216 pagesr19 Cse Syllabus Updatedputta ravikumarNo ratings yet
- UntitledDocument129 pagesUntitledSidharth KapoorNo ratings yet
- Feedback Amplifiers: Electronic Circuit IIDocument55 pagesFeedback Amplifiers: Electronic Circuit IIDeepa RangasamyNo ratings yet