Download as pdf or txt
You might also like
- Parte Manual Focus Rs 2016 5Document96 pagesParte Manual Focus Rs 2016 5Garikoitz FranciscoeneNo ratings yet
- UART Vs I2C Vs SPIDocument49 pagesUART Vs I2C Vs SPIKishore KishuNo ratings yet
- 1-Custom Undetectable Macro DevelopmentDocument10 pages1-Custom Undetectable Macro DevelopmentSaw GyiNo ratings yet
- Unit - 5 Serial CommunicationDocument51 pagesUnit - 5 Serial CommunicationM.venkateshNo ratings yet
- CommunicationDocument23 pagesCommunicationBarbie VeniNo ratings yet
- Embedded Systems Communication ProtocolsDocument23 pagesEmbedded Systems Communication Protocolsaparna046btece20No ratings yet
- IOT ProtocolsDocument66 pagesIOT ProtocolsAttota Appa RaoNo ratings yet
- ES Unit-5Document67 pagesES Unit-5palaji pradeepNo ratings yet
- Uart, Spi & I2cDocument12 pagesUart, Spi & I2cdeepakacharya424No ratings yet
- Basics of Uart CommunicationDocument7 pagesBasics of Uart CommunicationkarljamesccNo ratings yet
- Technical Seminar UARTDocument23 pagesTechnical Seminar UARTcharan467100% (1)
- Slides Lezione 7-2 Introduction To Uart CommunicationDocument6 pagesSlides Lezione 7-2 Introduction To Uart CommunicationChampu LaalNo ratings yet
- USARTDocument6 pagesUSARTAnoop S PillaiNo ratings yet
- Untitled PresentationDocument22 pagesUntitled PresentationNITHYASREE K RNo ratings yet
- Es IiiDocument12 pagesEs IiiGopinathan MNo ratings yet
- UART ProtocolDocument6 pagesUART Protocolvimal rajNo ratings yet
- UartDocument3 pagesUartGokul Kuthati100% (2)
- Basics of UART CommunicationDocument6 pagesBasics of UART Communicationshader12 shadeNo ratings yet
- Basics of The Communication ProtocolDocument19 pagesBasics of The Communication ProtocolNEETHU PRAKASH100% (1)
- Basics of The Communication ProtocolDocument19 pagesBasics of The Communication ProtocolNEETHU PRAKASHNo ratings yet
- Multi Channel UartDocument46 pagesMulti Channel UartSriram Pavan Kumar100% (1)
- Basics of UART CommunicationDocument17 pagesBasics of UART Communicationtuan.ebook3No ratings yet
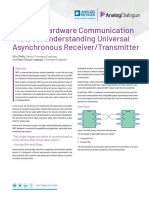
- UART - A Hardware Communication Protocol Understanding Universal Asynchronous Receiver - Transmitter - Analog DevicesDocument9 pagesUART - A Hardware Communication Protocol Understanding Universal Asynchronous Receiver - Transmitter - Analog DevicesBiancaa RNo ratings yet
- B. Tech ProjectDocument52 pagesB. Tech ProjectSanthosh KammamNo ratings yet
- Uart A Hardware Communication ProtocolDocument5 pagesUart A Hardware Communication ProtocolChintu Keshav100% (1)
- Project Report UartDocument35 pagesProject Report UartSushant MongiaNo ratings yet
- Unit - 4: 4.1. Serial Data Communication - BasicsDocument16 pagesUnit - 4: 4.1. Serial Data Communication - BasicsRAJU VALLEPUNo ratings yet
- Universal - Asynchronous - Receiver-Transmitter - ENDocument12 pagesUniversal - Asynchronous - Receiver-Transmitter - ENArturo Yanez S.G.No ratings yet
- Chapter 4Document30 pagesChapter 4udgam pandeyNo ratings yet
- Embedded Systems - Day 4Document37 pagesEmbedded Systems - Day 4199SARAS MISHRANo ratings yet
- "Universal Asynchronous Receiver and Transmitter" (UART) : A Project Report OnDocument24 pages"Universal Asynchronous Receiver and Transmitter" (UART) : A Project Report Ondasari himajaNo ratings yet
- UART Communication Protocol - How It Works - Codrey ElectronicsDocument14 pagesUART Communication Protocol - How It Works - Codrey ElectronicsPhogat Ashish100% (1)
- Unit-V Communication InterfaceDocument16 pagesUnit-V Communication Interfacesreekantha2013No ratings yet
- Management-Design and Implementation of UART-Mahesh GiriDocument6 pagesManagement-Design and Implementation of UART-Mahesh GiriBESTJournalsNo ratings yet
- UART Communication: 2023EV167 Department of EceDocument7 pagesUART Communication: 2023EV167 Department of EceNITHYASREE K RNo ratings yet
- Uart (Universal Asynchronous Receiver Transmitter) ProtocolDocument3 pagesUart (Universal Asynchronous Receiver Transmitter) Protocolshilpa8a8s100% (1)
- Fundamentals of Microcontroller & Its Application: Unit-IvDocument17 pagesFundamentals of Microcontroller & Its Application: Unit-IvRajan PatelNo ratings yet
- Rfid Tag and ReaderDocument8 pagesRfid Tag and ReaderKavin SengodanNo ratings yet
- CommunicationsDocument24 pagesCommunicationsMohamed RashidNo ratings yet
- Unit 6 MCDocument44 pagesUnit 6 MCkaustubhNo ratings yet
- CURS 6 Protocoale FireDocument38 pagesCURS 6 Protocoale FireCosmina DulhanNo ratings yet
- Synchronizing Two FPGA's For A Reliable Communication: Mercy SubaramanDocument4 pagesSynchronizing Two FPGA's For A Reliable Communication: Mercy SubaramanIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- Task 6Document13 pagesTask 6Vishnu SasidharanNo ratings yet
- 2023EV167 Department of Ece: UART CommunicationDocument7 pages2023EV167 Department of Ece: UART CommunicationNITHYASREE K RNo ratings yet
- 8251 UsartDocument32 pages8251 UsartVedant BohraNo ratings yet
- 5.UART Serial Communication Module Design and SimulationDocument4 pages5.UART Serial Communication Module Design and Simulationvenkatahari babuNo ratings yet
- Data Communication: CT101 - Computing SystemsDocument23 pagesData Communication: CT101 - Computing SystemsMuneeb AhmadNo ratings yet
- Design and Implementation of Uart On Soc PDFDocument6 pagesDesign and Implementation of Uart On Soc PDFMaharaj MmayaNo ratings yet
- Serial CommunicationsDocument23 pagesSerial CommunicationsPhuoc Trung Tran100% (1)
- Experiment-6: Ishaan AggarwalDocument6 pagesExperiment-6: Ishaan Aggarwalvishal sharmaNo ratings yet
- 8251 Material PDFDocument31 pages8251 Material PDFskarthikpriyaNo ratings yet
- Data TransmissionDocument15 pagesData TransmissionLemar C. ManarpaacNo ratings yet
- Serial InterfaceDocument19 pagesSerial InterfaceHafizNo ratings yet
- Chapter 3 - Serial Interfacing With Microprocessor Based SystemDocument28 pagesChapter 3 - Serial Interfacing With Microprocessor Based SystemSuroj BurlakotiNo ratings yet
- UART Interface To A Computer Using ARM MicrocontrollerDocument8 pagesUART Interface To A Computer Using ARM Microcontrollerhariskhalid1100% (2)
- MODULE 4: 8051 Serial Port Programming in Assembly and C: Microcontroller Notes:18EE52Document51 pagesMODULE 4: 8051 Serial Port Programming in Assembly and C: Microcontroller Notes:18EE52SuprithaNo ratings yet
- Comm ProtocalDocument6 pagesComm ProtocalMalli Naidu KarpurapuNo ratings yet
- Serial One 20Document18 pagesSerial One 20dominique fortierNo ratings yet
- Serial Communication Protocol:: Data Bit Communication Channel Computer Bus Parallel CommunicationDocument24 pagesSerial Communication Protocol:: Data Bit Communication Channel Computer Bus Parallel CommunicationAshalatha MadasuNo ratings yet
- Microprocessor & Microcontrollers: Serial CommunicationDocument36 pagesMicroprocessor & Microcontrollers: Serial CommunicationAbdul Rehman AfzalNo ratings yet
- Computer Networking: An introductory guide for complete beginners: Computer Networking, #1From EverandComputer Networking: An introductory guide for complete beginners: Computer Networking, #1Rating: 4.5 out of 5 stars4.5/5 (2)
- ABB Motors and Technical Data Sheet - DOL Generators: No. Data Unit RemarksDocument1 pageABB Motors and Technical Data Sheet - DOL Generators: No. Data Unit Remarksarash esmaeiliNo ratings yet
- LATS Engineering Tools LeafletDocument3 pagesLATS Engineering Tools LeafletFellipe BarbosaNo ratings yet
- The Cockroach Theory For Self Development - by Sundar Pichai - BitsnapperDocument3 pagesThe Cockroach Theory For Self Development - by Sundar Pichai - BitsnapperQurban LakhanNo ratings yet
- Arduino Based Digital Temperature Sensor With 7-Segment Displays-1 DOCUMENTATIONDocument21 pagesArduino Based Digital Temperature Sensor With 7-Segment Displays-1 DOCUMENTATIONchandramahesh736No ratings yet
- SEEL4343 - Chapter 3-Part1Document18 pagesSEEL4343 - Chapter 3-Part1farhatulNo ratings yet
- 212 - MIS107 Ia1 - Set2Document4 pages212 - MIS107 Ia1 - Set2Warla Rahman MahaNo ratings yet
- VirtualizationDocument66 pagesVirtualizationSoham MundhvaNo ratings yet
- LTE Connected Users Dimensioning GuidelineDocument37 pagesLTE Connected Users Dimensioning Guidelinengonigomo100% (1)
- Readme WinCC Professional V11 SP2Document52 pagesReadme WinCC Professional V11 SP2breynneroNo ratings yet
- 2018PSLEM025 ArchivageDocument190 pages2018PSLEM025 ArchivageBrayan GonzalezNo ratings yet
- Khartoum Masterplan Phase-1Document82 pagesKhartoum Masterplan Phase-1Beya BoueNo ratings yet
- Serial Pheripheral InterfaceDocument12 pagesSerial Pheripheral InterfaceK.R.RaguramNo ratings yet
- Koc4 Actual User ApprovalDocument19 pagesKoc4 Actual User ApprovalachyuthsapukNo ratings yet
- Akamai Connect Q&ADocument5 pagesAkamai Connect Q&AJuan Miguel Mogollon ParedesNo ratings yet
- The 8051 Microcontroller & Embedded Systems: Muhammad Ali Mazidi, Janice Mazidi & Rolin MckinlayDocument50 pagesThe 8051 Microcontroller & Embedded Systems: Muhammad Ali Mazidi, Janice Mazidi & Rolin MckinlayAkshwin KisoreNo ratings yet
- APS ThinsulatorsDocument3 pagesAPS ThinsulatorsBobbie RuckNo ratings yet
- Avh-X7700bt Update Instruction Ver853 PDFDocument3 pagesAvh-X7700bt Update Instruction Ver853 PDFLaloPianoNo ratings yet
- Basic Korean GrammarDocument2 pagesBasic Korean GrammarKenneth John RaotraotNo ratings yet
- Installing and Routing Cables BWS 1600GDocument30 pagesInstalling and Routing Cables BWS 1600GCristian NeacsuNo ratings yet
- Kraft Food Australia Case Analysis: Maricris M. Usita Oliver M. Dimaano Marcelo C. MendozaDocument7 pagesKraft Food Australia Case Analysis: Maricris M. Usita Oliver M. Dimaano Marcelo C. MendozaKhris UsitaNo ratings yet
- Arjun Appadurai - Cultural Diversity A Conceptual PlatformDocument8 pagesArjun Appadurai - Cultural Diversity A Conceptual PlatformFelipe GibsonNo ratings yet
- Document From Shubham ParsewarDocument15 pagesDocument From Shubham ParsewarakshayNo ratings yet
- DS TALEXX C003 enDocument2 pagesDS TALEXX C003 enPhilNo ratings yet
- 42pfl3508g 78 Fhi BRP PDFDocument3 pages42pfl3508g 78 Fhi BRP PDFram79co100% (1)
- JCP 2023 - Program Book - Technical SessionDocument6 pagesJCP 2023 - Program Book - Technical Sessiondataid112No ratings yet
- VargoDocument7 pagesVargoapi-288464193No ratings yet
- IngurubeDocument42 pagesIngurubeEmmanuel ConsolationNo ratings yet
- Az 500Document3 pagesAz 500Boris MasturovNo ratings yet