Download as pdf or txt
You might also like
- Innovation Landscape brief: Electric-vehicle smart chargingFrom EverandInnovation Landscape brief: Electric-vehicle smart chargingNo ratings yet
- Term Project ProposalDocument7 pagesTerm Project ProposalKartikeya PandeyNo ratings yet
- Applied SciencesDocument21 pagesApplied SciencesIvan StojanovNo ratings yet
- Design of A Microgrid Architecture For Rental E-BiDocument13 pagesDesign of A Microgrid Architecture For Rental E-BiAhmed MoosaniNo ratings yet
- The Parker Project: Cross-Brand Service Testing Using V2GDocument13 pagesThe Parker Project: Cross-Brand Service Testing Using V2Gkaustubh arekarNo ratings yet
- An Optimal Charging/discharging Strategy For Smart Electrical Car ParksDocument9 pagesAn Optimal Charging/discharging Strategy For Smart Electrical Car ParksAustin Okoth OmondiNo ratings yet
- Electronics 11 03175Document19 pagesElectronics 11 03175Nonthakorn BoonrakchatNo ratings yet
- 990b Project PlanDocument5 pages990b Project PlanAshish VoraNo ratings yet
- Template JAMEA-OTH YyyDocument6 pagesTemplate JAMEA-OTH YyyYousup AliNo ratings yet
- 1 s2.0 S0306261922001416 MainDocument14 pages1 s2.0 S0306261922001416 MainAlexandra Hoyos R.No ratings yet
- Electric Vehicle Charging Choices Modeling and Implications For Smart Charging ServicesDocument21 pagesElectric Vehicle Charging Choices Modeling and Implications For Smart Charging ServicesPRITI DASNo ratings yet
- Ev Charging 1Document33 pagesEv Charging 1Tech TronieNo ratings yet
- Energy-Efficiency Optimization and Control For EleDocument15 pagesEnergy-Efficiency Optimization and Control For EleTomek GNo ratings yet
- Optimal Energy Management For A Grid Connected PV-battery SystemDocument14 pagesOptimal Energy Management For A Grid Connected PV-battery SystemSuraj KanojiaNo ratings yet
- Comparison of Intelligent Charging Algorithms For EV To Reduce Peak Load and Demand VariabilityDocument10 pagesComparison of Intelligent Charging Algorithms For EV To Reduce Peak Load and Demand VariabilityAdriana Q.No ratings yet
- Towards A Holistic Approach For Problems in The Energy and Mobility DomainDocument9 pagesTowards A Holistic Approach For Problems in The Energy and Mobility DomainNaresh BhandariNo ratings yet
- Energies: Electric Vehicle Charging Strategy For Isolated Systems With High Penetration of Renewable GenerationDocument21 pagesEnergies: Electric Vehicle Charging Strategy For Isolated Systems With High Penetration of Renewable GenerationAlberto RiosNo ratings yet
- Charging and Discharging of Electric Vehicles in PDocument31 pagesCharging and Discharging of Electric Vehicles in PmrtazaaltaaiNo ratings yet
- Evaluating The Impact of Electric Vehicles On The Smart GridDocument4 pagesEvaluating The Impact of Electric Vehicles On The Smart GridRutvik DholiyaNo ratings yet
- Internet of Things Enabled Electric Vehicles in Smart CitiesDocument8 pagesInternet of Things Enabled Electric Vehicles in Smart Citiespushpa lathaNo ratings yet
- InTech-Batteries Charging Systems For Electric and Plug in Hybrid Electric VehiclesDocument20 pagesInTech-Batteries Charging Systems For Electric and Plug in Hybrid Electric VehiclesM VetriselviNo ratings yet
- Sustainability 10 01324Document20 pagesSustainability 10 01324SHIVI TRIPATHINo ratings yet
- The Concept of Ev S Intelligent Integrated Station and Its Energy FlowDocument29 pagesThe Concept of Ev S Intelligent Integrated Station and Its Energy FlowHorváth PéterNo ratings yet
- Isc2 2016 7580797Document6 pagesIsc2 2016 7580797ashadoitNo ratings yet
- Energies 05 04665 PDFDocument18 pagesEnergies 05 04665 PDFeng_ahmed4444No ratings yet
- Plug-In Hybrid Electric Vehicles and Smart Grid: Investigations Based On A Micro-SimulationDocument23 pagesPlug-In Hybrid Electric Vehicles and Smart Grid: Investigations Based On A Micro-SimulationAchraf BouraNo ratings yet
- 10 35378-Gujs 554206-1121835Document19 pages10 35378-Gujs 554206-1121835Nahil ShakerNo ratings yet
- Resoconto Casi StudioDocument13 pagesResoconto Casi StudioMichele FerrantiNo ratings yet
- Un Enfoque Teórico Del Juego de Campo Medio para La Carga de Vehículos EléctricosDocument10 pagesUn Enfoque Teórico Del Juego de Campo Medio para La Carga de Vehículos EléctricosJULIETTE XIMENA SANCHEZ HUERTASNo ratings yet
- Incorporating Demand Response of Electri PDFDocument11 pagesIncorporating Demand Response of Electri PDFMuhammad ApriNo ratings yet
- CHARGINGs11276 019 01993 WDocument14 pagesCHARGINGs11276 019 01993 WbatuhanNo ratings yet
- Integration of Renewable Energy Sources and Electric Vehicles in V2G Network PDFDocument28 pagesIntegration of Renewable Energy Sources and Electric Vehicles in V2G Network PDFALEX AGUSTO TORRE HUAMANNo ratings yet
- Game Theory Based Charging Solution For Networked Electric Vehicles: A Location-Aware ApproachDocument13 pagesGame Theory Based Charging Solution For Networked Electric Vehicles: A Location-Aware ApproachgkpNo ratings yet
- Smart Charging of Electric Vehicles With Photovoltaic Power and Vehicle-To-Grid Technology in A Microgrid A Case StudyDocument11 pagesSmart Charging of Electric Vehicles With Photovoltaic Power and Vehicle-To-Grid Technology in A Microgrid A Case StudyEngEzequielNo ratings yet
- Energies 15 07243 v3Document26 pagesEnergies 15 07243 v3Tran DanteNo ratings yet
- Batteries Charging Systems For Electric and Plug-In Hybrid Electric VehiclesDocument19 pagesBatteries Charging Systems For Electric and Plug-In Hybrid Electric VehiclesAmit RamvatNo ratings yet
- Optimal Sizing of Renewable Energy Powered Hydrogen and Electric Vehicle Charging Station HEVCSDocument16 pagesOptimal Sizing of Renewable Energy Powered Hydrogen and Electric Vehicle Charging Station HEVCSSaumitriNo ratings yet
- Optimal Charging Schedule of Electric Vehicle Using Evolutionary Programming To Minimise CostsDocument15 pagesOptimal Charging Schedule of Electric Vehicle Using Evolutionary Programming To Minimise CostsAsmaa NasserNo ratings yet
- Energies: Electric Vehicles' User Charging Behaviour Simulator For A Smart CityDocument20 pagesEnergies: Electric Vehicles' User Charging Behaviour Simulator For A Smart CityStanley Y, H, CHIUNo ratings yet
- Energy Policy: Sarah G. Nurre, Russell Bent, Feng Pan, Thomas C. SharkeyDocument14 pagesEnergy Policy: Sarah G. Nurre, Russell Bent, Feng Pan, Thomas C. SharkeySumit RathorNo ratings yet
- IJRPR10905Document9 pagesIJRPR10905sarveshchudeNo ratings yet
- Optimal Planing of Eletrical Vehicle StationsDocument12 pagesOptimal Planing of Eletrical Vehicle StationsJoão PintoNo ratings yet
- Electric Vehicle Thesis PDFDocument4 pagesElectric Vehicle Thesis PDFWriteMyPaperForMeUK100% (4)
- Energies: Vehicle Electrification: New Challenges and Opportunities For Smart GridsDocument20 pagesEnergies: Vehicle Electrification: New Challenges and Opportunities For Smart GridsMahabub HaiderNo ratings yet
- Reducing of Energy Consumption in Public Transport - Results of Experimental Exploitation of Super Capacitor Energy Bank in Gdynia Trolleybus SystemDocument8 pagesReducing of Energy Consumption in Public Transport - Results of Experimental Exploitation of Super Capacitor Energy Bank in Gdynia Trolleybus SystemMikolajNo ratings yet
- Energies 13 00039 v2Document23 pagesEnergies 13 00039 v2Nurul Ain RosdiNo ratings yet
- Optimum Design of A Hybrid Renewable Energy SystemDocument21 pagesOptimum Design of A Hybrid Renewable Energy SystemsahiiiiNo ratings yet
- Probabilistic Agent-Based Model of Electric Vehicle Charging Demand To Analyse The Impact On Distribution NetworksDocument28 pagesProbabilistic Agent-Based Model of Electric Vehicle Charging Demand To Analyse The Impact On Distribution NetworksLam VuNo ratings yet
- A Coordinated Charging Model For Electric Vehicles in A Smart Grid Using Whale Optimization AlgorithmDocument8 pagesA Coordinated Charging Model For Electric Vehicles in A Smart Grid Using Whale Optimization AlgorithmAsmaa NasserNo ratings yet
- Fuzzy Based Ev Charging With Reduced Power Fluctuation Under Renewable Power Consumption ConstraintDocument16 pagesFuzzy Based Ev Charging With Reduced Power Fluctuation Under Renewable Power Consumption ConstraintkesavantNo ratings yet
- Energy Conversion and Management: Masoud Honarmand, Alireza Zakariazadeh, Shahram JadidDocument11 pagesEnergy Conversion and Management: Masoud Honarmand, Alireza Zakariazadeh, Shahram JadidKiranNo ratings yet
- Modelling of Electric Vehicle Charging Station and Controlled by Fuzzy Logic Controller With Different Modes of OperationDocument15 pagesModelling of Electric Vehicle Charging Station and Controlled by Fuzzy Logic Controller With Different Modes of OperationvijayakumarNo ratings yet
- Potential Application of Solar Energy Systems For Electrified Urban Transportation SystemsDocument17 pagesPotential Application of Solar Energy Systems For Electrified Urban Transportation SystemsMikolajNo ratings yet
- Optimal Electric Vehicle Charging Station Placing With Integration of Renewable EnergyDocument5 pagesOptimal Electric Vehicle Charging Station Placing With Integration of Renewable EnergyNiyarjyoti dasNo ratings yet
- Applied Energy: Chiara Fiori, Kyoungho Ahn, Hesham A. RakhaDocument12 pagesApplied Energy: Chiara Fiori, Kyoungho Ahn, Hesham A. RakhaJosé GonzálezNo ratings yet
- Smart EV Charging: A Global Review of Promising PracticesDocument13 pagesSmart EV Charging: A Global Review of Promising PracticesAkshay GattuNo ratings yet
- Mathematics 11 02586 v2Document26 pagesMathematics 11 02586 v2Kylo RenNo ratings yet
- E3sconf Icregcsd2023 01006Document12 pagesE3sconf Icregcsd2023 01006kanchanmshinde2000No ratings yet
- Electric Power Systems Research: Ebrahim Mortaz, Jorge ValenzuelaDocument9 pagesElectric Power Systems Research: Ebrahim Mortaz, Jorge ValenzuelasdfsdfNo ratings yet
- Synergies Between E-Mobility and PhotovoltaicDocument30 pagesSynergies Between E-Mobility and PhotovoltaicMikel MendezNo ratings yet
- Integrated Energy Scheduling and Routing For A Network of Mobile ProsumersDocument12 pagesIntegrated Energy Scheduling and Routing For A Network of Mobile ProsumersAtiquzzaman ShomaNo ratings yet
- ProblemsDocument9 pagesProblemsoctober87No ratings yet
- Demand Side Management-Literature Review and Performance ComparisonDocument11 pagesDemand Side Management-Literature Review and Performance Comparisonoctober87No ratings yet
- Adaptive Hierarchical Energy Management Design For A Plug-In Hybrid Electric VehicleDocument10 pagesAdaptive Hierarchical Energy Management Design For A Plug-In Hybrid Electric Vehicleoctober87No ratings yet
- Em 909Document4 pagesEm 909october87No ratings yet
- Engineering Design Research Methodology - 7.5 ECTS - PHD Course - Product Development Research LabDocument8 pagesEngineering Design Research Methodology - 7.5 ECTS - PHD Course - Product Development Research Laboctober87No ratings yet
- 2 RectifierDocument12 pages2 Rectifieroctober87No ratings yet
- Role of Optimization Techniques in MicrogridDocument22 pagesRole of Optimization Techniques in Microgridoctober87No ratings yet
- Em 330Document5 pagesEm 330october87No ratings yet
- Em 182Document6 pagesEm 182october87No ratings yet
- COMMUNICATION3Document3 pagesCOMMUNICATION3october87No ratings yet
- A Wireless Controller To Enhance DynamicDocument9 pagesA Wireless Controller To Enhance Dynamicoctober87No ratings yet
- Blockchain TechnologiesDocument13 pagesBlockchain Technologiesoctober87No ratings yet
- Modeling and Control of Building-Integrated Microgrids For Optimal EnergyDocument21 pagesModeling and Control of Building-Integrated Microgrids For Optimal Energyoctober87No ratings yet
- COMMUNICATION1Document10 pagesCOMMUNICATION1october87No ratings yet
- 21 Virtual Synchronous Generator A Control Strategy ToDocument7 pages21 Virtual Synchronous Generator A Control Strategy Tooctober87No ratings yet
- Optimization Model For Expansion Planning of Distribution SystemDocument7 pagesOptimization Model For Expansion Planning of Distribution Systemoctober87No ratings yet
- Micro Grid Stabilization Using The Virtual Synchronous Machine (VISMADocument6 pagesMicro Grid Stabilization Using The Virtual Synchronous Machine (VISMAoctober87No ratings yet
- Investigation of The Virtual SynchronousDocument6 pagesInvestigation of The Virtual Synchronousoctober87No ratings yet
- Comparison of Methods For Implementing Virtual Synchronous Machine OnDocument6 pagesComparison of Methods For Implementing Virtual Synchronous Machine Onoctober87No ratings yet
- Experimental Verification of Virtual InertiaDocument6 pagesExperimental Verification of Virtual Inertiaoctober87No ratings yet
- COMMUNICATIONDocument9 pagesCOMMUNICATIONoctober87No ratings yet
- IET Seiscon GamsDocument7 pagesIET Seiscon Gamsoctober87No ratings yet
- Faria 2013Document9 pagesFaria 2013october87No ratings yet
- A Technical Review On Control Strategies ForDocument6 pagesA Technical Review On Control Strategies Foroctober87No ratings yet
- Electric Power Systems Research: SciencedirectDocument12 pagesElectric Power Systems Research: Sciencedirectoctober87No ratings yet
- Module 2Document37 pagesModule 2october87No ratings yet
- Shunt Power Active Filter Control Under Non Ideal Voltages ConditionsDocument6 pagesShunt Power Active Filter Control Under Non Ideal Voltages Conditionsoctober87No ratings yet
- Module 1Document38 pagesModule 1october87No ratings yet
- Fall in Electricity Markets Prices in March Due To The Coronavirus Crisis - AleaSoft Energy ForecastingDocument14 pagesFall in Electricity Markets Prices in March Due To The Coronavirus Crisis - AleaSoft Energy Forecastingoctober87No ratings yet
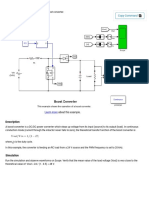
- Boost Converter - MATLAB & SimulinkDocument2 pagesBoost Converter - MATLAB & Simulinkoctober87No ratings yet
- Electric Vehicle ChargingDocument119 pagesElectric Vehicle Charginggeogho67% (3)
- Session 2Document35 pagesSession 2Asif MahmudNo ratings yet
- Manisha.G-Remote Monitoring of Electric Vehicle Charging Stations in Smart Campus Parking LotDocument5 pagesManisha.G-Remote Monitoring of Electric Vehicle Charging Stations in Smart Campus Parking LotAnil KumarNo ratings yet
- A Review On Vehicle To GridDocument13 pagesA Review On Vehicle To GridYasir ButtNo ratings yet
- Thesis Tiago Meintjes 81190Document112 pagesThesis Tiago Meintjes 81190Rodrigo MoraisNo ratings yet
- List PaperDocument3 pagesList PaperKharisma AdamNo ratings yet
- The DC Fast Charging Architecture For Implementing Vehicle-To-Grid Technology Within A Micro-GridDocument7 pagesThe DC Fast Charging Architecture For Implementing Vehicle-To-Grid Technology Within A Micro-GridIJRASETPublicationsNo ratings yet
- Vehicle To GridDocument3 pagesVehicle To GridGreeshma PuttannaNo ratings yet
- PLC in Energy MarketsDocument15 pagesPLC in Energy MarketsKarim SenhajiNo ratings yet
- IRENA Innovation Outlook EV Smart Charging 2019 PDFDocument138 pagesIRENA Innovation Outlook EV Smart Charging 2019 PDFkamaleshsNo ratings yet
- Electric Vehicles ChallengesDocument16 pagesElectric Vehicles ChallengesKhushboo GediyaNo ratings yet
- Untitled FormDocument5 pagesUntitled FormNamo NamoNo ratings yet
- A Review On Topologies For Fast Charging Stations For Electric VehiclesDocument6 pagesA Review On Topologies For Fast Charging Stations For Electric VehiclesYuvraj PrabhakarNo ratings yet
- Tüv Rheinland 170111 - TR Ev ServicesDocument9 pagesTüv Rheinland 170111 - TR Ev ServicesHaroon ShaikhNo ratings yet
- 2009 Annual Report PDFDocument370 pages2009 Annual Report PDFMd Kaleem100% (1)
- Integrated Converter With G2V V2G and DC V2V Charging Capabilities For Switched Reluctance Motor Drive-Train Based EV ApplicationDocument14 pagesIntegrated Converter With G2V V2G and DC V2V Charging Capabilities For Switched Reluctance Motor Drive-Train Based EV ApplicationhemaNo ratings yet
- EV SynopsisDocument10 pagesEV Synopsissuresh mpNo ratings yet
- Warning Messages Explanation: (1) Critical ExcessDocument2 pagesWarning Messages Explanation: (1) Critical ExcessPedro Vitor IldefonsoNo ratings yet
- Autonomous Disributed v2gDocument6 pagesAutonomous Disributed v2gEva ViskadourakiNo ratings yet
- Sae 11UPDD0512Document44 pagesSae 11UPDD0512Lokesh SierraNo ratings yet
- WEF 2019 - A Vision For A Sustainable Battery Value Chain in 2030 PDFDocument52 pagesWEF 2019 - A Vision For A Sustainable Battery Value Chain in 2030 PDFFabian HafnerNo ratings yet
- Renault CEO Calls For Auto European Plan To Protect Against Onslaught of EVs From China'Document19 pagesRenault CEO Calls For Auto European Plan To Protect Against Onslaught of EVs From China'Maria MeranoNo ratings yet
- Electrical Vehicle Workshop UKPN PDFDocument42 pagesElectrical Vehicle Workshop UKPN PDFDaniel PrataNo ratings yet
- Anju ProjectDocument76 pagesAnju ProjectPujita kushwahaNo ratings yet
- Transcript Digital Grid Unleashed A Value Chain Facing DisruptionDocument12 pagesTranscript Digital Grid Unleashed A Value Chain Facing DisruptionAhmed FoaudNo ratings yet
- Design of Low Power Charging Station For Electrical VehicleDocument20 pagesDesign of Low Power Charging Station For Electrical VehicleClassic PrintersNo ratings yet
- Smart EV Charging Station ProjectDocument18 pagesSmart EV Charging Station Projectsagar swamiNo ratings yet
- Vehicle To Grid Technology:A Review: (Ym - Zhou, Xy - Li) @siat - Ac.cnDocument6 pagesVehicle To Grid Technology:A Review: (Ym - Zhou, Xy - Li) @siat - Ac.cnEhtisham ZiaNo ratings yet
- Electric Vehicle Theory For Future Applications by DR A B Rajib Hazarika PHD FRAS AESDocument148 pagesElectric Vehicle Theory For Future Applications by DR A B Rajib Hazarika PHD FRAS AESDrabrajib HazarikaNo ratings yet