Download as pdf or txt
You might also like
- Stress Tables and Stress Calculating EquipmentDocument28 pagesStress Tables and Stress Calculating EquipmentXDXDXD45% (11)
- Shellvoy 6 (Searchable)Document20 pagesShellvoy 6 (Searchable)sharkpm100% (1)
- Cargo Handling and Stowage: A Guide for Loading, Handling, Stowage, Securing, and Transportation of Different Types of Cargoes, Except Liquid Cargoes and GasFrom EverandCargo Handling and Stowage: A Guide for Loading, Handling, Stowage, Securing, and Transportation of Different Types of Cargoes, Except Liquid Cargoes and GasRating: 5 out of 5 stars5/5 (11)
- Troubleshooting 414E, 416E, 420E, 422E, 428E, 430E, 432E, 434E, 442E and 444E Backhoe Loaders - C - 0Document4 pagesTroubleshooting 414E, 416E, 420E, 422E, 428E, 430E, 432E, 434E, 442E and 444E Backhoe Loaders - C - 0Cesar Arturo Pajuelo Espinoza100% (3)
- Tax Invoice/Bill of Supply/Cash Memo: (Original For Recipient)Document1 pageTax Invoice/Bill of Supply/Cash Memo: (Original For Recipient)maaathanNo ratings yet
- Microcontroller Based Automatic Traffic Light ControllerDocument17 pagesMicrocontroller Based Automatic Traffic Light ControllerAmina AnsariNo ratings yet
- Aircraft Weight and Balance Handbook: FAA-H-8083-1AFrom EverandAircraft Weight and Balance Handbook: FAA-H-8083-1ARating: 5 out of 5 stars5/5 (1)
- Panama Canal Regulations PDFDocument107 pagesPanama Canal Regulations PDFmaaathanNo ratings yet
- Android Studio and SDK Tools - Android StudioDocument9 pagesAndroid Studio and SDK Tools - Android StudioJean claude onanaNo ratings yet
- Cable and Circuit TypesDocument72 pagesCable and Circuit TypesChanel Maglinao100% (4)
- Eat OnDocument160 pagesEat OnWashington MazziniNo ratings yet
- BKI 2009 Vol 2 Section 1Document8 pagesBKI 2009 Vol 2 Section 1Nida I. FarihahNo ratings yet
- Subdivision and StabilityDocument2 pagesSubdivision and Stabilityeyes_shield89No ratings yet
- Preparation of Loading ManualsDocument43 pagesPreparation of Loading ManualsReza BabriNo ratings yet
- Bulk Carriers Alternate Hold LoadingDocument5 pagesBulk Carriers Alternate Hold LoadingMehul Neha BishtNo ratings yet
- RINA - Trim & Stability BookletDocument5 pagesRINA - Trim & Stability Bookletkevin kurnia marpaungNo ratings yet
- SECTION - 1 General DifinitionDocument7 pagesSECTION - 1 General DifinitionGig MacoNo ratings yet
- Carriage of Containers On Bulk CarriersDocument6 pagesCarriage of Containers On Bulk CarriersCydrek EvoraNo ratings yet
- Seamanship Ii Stress Tables and Stress Calculating EquipmentDocument29 pagesSeamanship Ii Stress Tables and Stress Calculating EquipmentCleanard Hidalgo100% (1)
- RINA 2009 Bulk Carriers - Allowable Hold Mass Curves - Bureau Veritas - FINALDocument16 pagesRINA 2009 Bulk Carriers - Allowable Hold Mass Curves - Bureau Veritas - FINALKonstantis_chNo ratings yet
- Vvol II 2017 Rules For Hull2017 32 209Document178 pagesVvol II 2017 Rules For Hull2017 32 209engineering jrNo ratings yet
- General Intact Stability Criteria For All ShipsDocument7 pagesGeneral Intact Stability Criteria For All ShipsGiorgi KandelakiNo ratings yet
- As CL Ac Rev6Document19 pagesAs CL Ac Rev6Tammam HassanNo ratings yet
- MMC 387 Mandatory Implementation of The Amendments To The 2011 ESP Code Rev. MR 2Document6 pagesMMC 387 Mandatory Implementation of The Amendments To The 2011 ESP Code Rev. MR 2Saransh MotwaniNo ratings yet
- What Is International Grain CodeDocument3 pagesWhat Is International Grain CodeJames JarabeloNo ratings yet
- 380 Part A e 2023Document45 pages380 Part A e 2023adamos.georgiosNo ratings yet
- IACS - Strength of ShipsDocument266 pagesIACS - Strength of ShipsMorgan100% (2)
- Intact Stability and Stability in The Damaged ConditionDocument14 pagesIntact Stability and Stability in The Damaged Conditionhrish732No ratings yet
- Assignment For Class 2 COCDocument24 pagesAssignment For Class 2 COCSam BillimoriaNo ratings yet
- Capt. Sanga AssignmentDocument24 pagesCapt. Sanga AssignmentRecca Pirrip100% (1)
- S11 Longitudinal Strength Standard S11: Fs Are As Shown in Fig. 1Document13 pagesS11 Longitudinal Strength Standard S11: Fs Are As Shown in Fig. 1poovendanNo ratings yet
- Block LoadingDocument3 pagesBlock Loadingagite1212No ratings yet
- Naval Arch 2 Complete NotesDocument34 pagesNaval Arch 2 Complete Notes8569yashhiwaraleNo ratings yet
- IrsDocument15 pagesIrsSandeep WankhedeNo ratings yet
- smk4532 GaDocument2 pagessmk4532 GaHugo FerreiraNo ratings yet
- Accommodation Ladder Inspection RequirementsDocument5 pagesAccommodation Ladder Inspection RequirementsansarALLAAHNo ratings yet
- Class+Notation 2012 Rev1Document10 pagesClass+Notation 2012 Rev1Melina SimamoraNo ratings yet
- TB Rule Reference Original 1st January 2014 Issue Pdf2304Document385 pagesTB Rule Reference Original 1st January 2014 Issue Pdf2304Carmen IchimNo ratings yet
- Definition of Oil'': 1 Definitions (Reg. 1.1)Document4 pagesDefinition of Oil'': 1 Definitions (Reg. 1.1)chacha javierNo ratings yet
- Stability Precious NoteDocument48 pagesStability Precious NoteAung Htet KyawNo ratings yet
- ZKDKDKDDocument1 pageZKDKDKDshortdumbellNo ratings yet
- What Is International Grain CodeDocument3 pagesWhat Is International Grain CodeJames JarabeloNo ratings yet
- How Gas Carriers Are Classified As Per Its Survival CapabilitiesDocument6 pagesHow Gas Carriers Are Classified As Per Its Survival Capabilitiessidadams2No ratings yet
- Preparation For LoadingDocument6 pagesPreparation For LoadingBiplab SharmaNo ratings yet
- Appendix 10: Stability Information BookDocument3 pagesAppendix 10: Stability Information BookNAUTASNo ratings yet
- Section 23 Intact and Damage Stability: I - Part 6 GL 2010 Page 23-1Document8 pagesSection 23 Intact and Damage Stability: I - Part 6 GL 2010 Page 23-1JAAK2005No ratings yet
- Excellent Notes For Intact and Damage StabilityDocument15 pagesExcellent Notes For Intact and Damage Stabilitynishant100% (2)
- Stability Theory IIDocument36 pagesStability Theory IIFazl GhoriNo ratings yet
- GL Marine Operations IV-6-10Document14 pagesGL Marine Operations IV-6-10ruovNo ratings yet
- Stowage and Lashing of ContainersDocument54 pagesStowage and Lashing of Containersalfonxxl100% (1)
- Iacs Url 5Document9 pagesIacs Url 5xatzaraNo ratings yet
- ZhdehdeDocument1 pageZhdehdeshortdumbellNo ratings yet
- Calculation Form For Grain LoadingDocument11 pagesCalculation Form For Grain Loadingthwin phyo100% (1)
- Yachts December 2014: Guide For Building and ClassingDocument11 pagesYachts December 2014: Guide For Building and ClassingzebegaNo ratings yet
- 380 Erstl A Egstl A 2017Document38 pages380 Erstl A Egstl A 2017Erwin GunawanNo ratings yet
- ANCSYSENG004Document21 pagesANCSYSENG004Tom MoritzNo ratings yet
- Stability Talkie TalkieDocument43 pagesStability Talkie TalkieAhtashamuddin NizamudinNo ratings yet
- Stability Information Manual - FormatoDocument42 pagesStability Information Manual - FormatoelavayenNo ratings yet
- Part10 PDFDocument60 pagesPart10 PDFCua TranNo ratings yet
- Stability Talkie TalkieDocument46 pagesStability Talkie TalkieSakthi Javelin100% (1)
- Damage StabilityDocument4 pagesDamage StabilityBhushan PawaskarNo ratings yet
- 3Cl Aquino. Julius D. Rigel Read The Following Questions and Pass Your Answer Individually. 1. What Is International Grain Code (IGC) ?Document3 pages3Cl Aquino. Julius D. Rigel Read The Following Questions and Pass Your Answer Individually. 1. What Is International Grain Code (IGC) ?MARINO III SAYSONNo ratings yet
- High-Speed Craft: Guide For Building and ClassingDocument5 pagesHigh-Speed Craft: Guide For Building and ClassingAlessandra ChavesNo ratings yet
- Assessment of Ballast Water Management PlansDocument12 pagesAssessment of Ballast Water Management PlansmariodalNo ratings yet
- Proclamation 1258 — Rules for the Measurement of Vessels for the Panama CanalFrom EverandProclamation 1258 — Rules for the Measurement of Vessels for the Panama CanalNo ratings yet
- Naval Mechanical Engineering: Gas Turbine Propulsion, Auxiliary, and Engineering Support SystemsFrom EverandNaval Mechanical Engineering: Gas Turbine Propulsion, Auxiliary, and Engineering Support SystemsNo ratings yet
- International Regulations for Preventing Collisions at SeaFrom EverandInternational Regulations for Preventing Collisions at SeaNo ratings yet
- Hydro Marine Standard ItemsDocument9 pagesHydro Marine Standard ItemsmaaathanNo ratings yet
- NominationDocument3 pagesNominationmaaathanNo ratings yet
- Aalco Metals LTD - Aluminium Alloy DNV Certified Marine Extrusions Extrusions - 419Document3 pagesAalco Metals LTD - Aluminium Alloy DNV Certified Marine Extrusions Extrusions - 419maaathanNo ratings yet
- Bts - Ets - E210349 Plan Dsme2238 Bwts Retrofit (H.00123-E-113)Document2 pagesBts - Ets - E210349 Plan Dsme2238 Bwts Retrofit (H.00123-E-113)maaathanNo ratings yet
- RestrictedDocument5 pagesRestrictedmaaathanNo ratings yet
- BWTS Sampling Procedure V1Document5 pagesBWTS Sampling Procedure V1maaathanNo ratings yet
- Fabrication Inspection Checklist PDFDocument5 pagesFabrication Inspection Checklist PDFmaaathanNo ratings yet
- RestrictedDocument7 pagesRestrictedmaaathanNo ratings yet
- 2020.06.11 - 15-25-181143 Corrigendum - 2Document7 pages2020.06.11 - 15-25-181143 Corrigendum - 2maaathanNo ratings yet
- Diving AccessoriesDocument18 pagesDiving AccessoriesmaaathanNo ratings yet
- Salvage Bags PDFDocument4 pagesSalvage Bags PDFmaaathanNo ratings yet
- Em Pmi375 T800 PDFDocument6 pagesEm Pmi375 T800 PDFmaaathanNo ratings yet
- Total Range: Expand Your Efficiency HorizonsDocument40 pagesTotal Range: Expand Your Efficiency Horizonsmaaathan100% (1)
- HPV Hydrostatics Run2Document6 pagesHPV Hydrostatics Run2maaathanNo ratings yet
- Em Pmi375 T800 PDFDocument6 pagesEm Pmi375 T800 PDFmaaathanNo ratings yet
- Main Foundation Leg Will Clash With Fire Pump Valve RouteDocument1 pageMain Foundation Leg Will Clash With Fire Pump Valve RoutemaaathanNo ratings yet
- United States Patent: Caro Et AlDocument13 pagesUnited States Patent: Caro Et AlmaaathanNo ratings yet
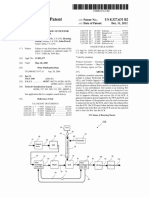
- United States Patent: (12) (10) Patent No.: US 8,075,651 B2Document11 pagesUnited States Patent: (12) (10) Patent No.: US 8,075,651 B2maaathanNo ratings yet
- Modification For New Panama Canal Transit PDFDocument1 pageModification For New Panama Canal Transit PDFmaaathanNo ratings yet
- Modification For New Panama Canal Transit PDFDocument1 pageModification For New Panama Canal Transit PDFmaaathanNo ratings yet
- D05-00-167P FX150plus Specification SheetDocument7 pagesD05-00-167P FX150plus Specification SheetJuanNo ratings yet
- PI 15.20 DraftDocument924 pagesPI 15.20 DraftsrishynNo ratings yet
- msd-8910 frm28850Document2 pagesmsd-8910 frm28850teromandosNo ratings yet
- Intel® Core™ I5-4210u Processor PDFDocument3 pagesIntel® Core™ I5-4210u Processor PDFZoran MarkovicNo ratings yet
- Ardiuno Relay InterfacingDocument5 pagesArdiuno Relay InterfacingKarthikeyan TNo ratings yet
- Huawei - Drive Test TrainingDocument53 pagesHuawei - Drive Test TrainingIwan Arinta100% (9)
- Sensors Dan ActuatorDocument21 pagesSensors Dan ActuatorMarsius SihombingNo ratings yet
- Chapter 2 - Networking & TelecommunicationDocument32 pagesChapter 2 - Networking & TelecommunicationMonalissa SmileNo ratings yet
- CMP 18Document46 pagesCMP 18ovmlcabreraNo ratings yet
- A Beginner's Guide To Using IRAFDocument94 pagesA Beginner's Guide To Using IRAFAnonymous yZdHImNo ratings yet
- Fasteners Lecture 11-20-03Document67 pagesFasteners Lecture 11-20-03laponggaNo ratings yet
- Pro Cut 25 ManualDocument2 pagesPro Cut 25 ManualMauricio Sanchez Jr.No ratings yet
- Simio Installation NotesDocument3 pagesSimio Installation Notesep915197No ratings yet
- Autologic Product CatalogDocument11 pagesAutologic Product Catalogmn_sundaraamNo ratings yet
- Exocad Ids Flyer Whatsnew en ScreenDocument9 pagesExocad Ids Flyer Whatsnew en Screenvaleriu vatamanNo ratings yet
- CW-DSC-005 - Offshore Installation InstructionDocument32 pagesCW-DSC-005 - Offshore Installation InstructionMichel NgiangiNo ratings yet
- ST101 Kiln Over-Temperature TripDocument2 pagesST101 Kiln Over-Temperature TripDave WalkerNo ratings yet
- يزن فراس - الكترونيكDocument8 pagesيزن فراس - الكترونيكYazoon RahaweeNo ratings yet
- TVC Hyundai HF-2004 Chassis CH-16CA PDFDocument45 pagesTVC Hyundai HF-2004 Chassis CH-16CA PDFJosé BenavidesNo ratings yet
- I61132001G1-8 Hix5622Document2 pagesI61132001G1-8 Hix5622Mariem Sameh Ben LimemNo ratings yet
- NE40E-X Series Products Hardware: ForewordDocument29 pagesNE40E-X Series Products Hardware: ForewordHarish100% (1)
- Performance Vs Load Vs StressDocument2 pagesPerformance Vs Load Vs StresssujadilipNo ratings yet
- Pressman CH 10 Architectural StyleDocument44 pagesPressman CH 10 Architectural Stylerajianand2No ratings yet
- P5S800 VMDocument3 pagesP5S800 VMgeorgedragosNo ratings yet
- DVR User ManualDocument102 pagesDVR User ManualLussandro IlhaNo ratings yet