Professional Documents
Culture Documents
Banve A0 Final
Banve A0 Final
Uploaded by
Hoàng NgọcOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Banve A0 Final
Banve A0 Final
Uploaded by
Hoàng NgọcCopyright:
Available Formats
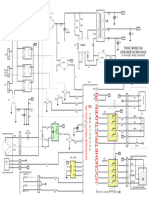
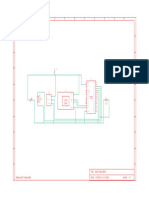
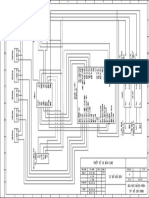
SƠ ĐỒ KHỐI KHỐI NGUỒN
Power X1
L1
Data Signal 1 1
2 N1 2
X5 X2
220VAC 1 1 1 X4
Meanwell 12V 29A 220VAC Meanwell 24V 50A 1 L
1 L 24V 1
2 2 2 2 N
X2 X3 X4 2 N GND 2 Colibri 7
Proximity Sensor X9
Led 100 PC Colibri 7 X3
LJ12A3
1 L 24V 1 24V 1 X6
1 L
2 N GND 2 GND 2
X10 2 N
Camera 705 color Mega 2560 X6
Led 100
24V 1 24V 1
GND GND 2 X7
2
Camera 712 mono Driver EM415S Driver EM415S Driver EM422S Driver EM422S 1 L
X7 X11
2 N
24V 1 24V 1
Camera 705 Color
Stepper motor Stepper motor Stepper motor Stepper motor GND 2 GND 2
X12 X8
20CM003 20CM003 42CM06 42CM06 X8
Meanwell 12V 29A 1 L
24V 1 2 N
GND 2 Camera 712 Mono
X13
Meanwell 24V 50A
KHỐI ĐiỀU KHIỂN
5V
IOREF AERF
RESET RESET GND KHỐI ĐỘNG LỰC
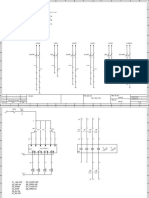
D3 3.3V PCINT7/PWM13 1 Driver EM415S X9 Driver EM415S X10
CD1206-S01575 R5 5V PCINT6/PWM12 2 J1 PUL+ VCC 1 PUL+ VCC 1
5V J1 J2
10K PUL- GND 2 PUL- GND 2
GND PCINT5/PWM11 3
1 20CM003 1 20CM003
GND PCINT4/PWM10 1 2 DIR+ A+ A+ 2 DIR+ A+ A+
RESET Vin PWM9 2 J2 3
DIR- A- A- M M1
3
DIR- A- A- M M2
RESET C5 GND GND PWM8 3
B+ B+
BUTTON 22p XTAL2 XTAL2 PWM7 1 ENA+ B+ ENA+ B+
B- B-
XTAL1 XTAL1 PWM6 2 J3 ENA- B- ENA- B-
PWM5 3 GND GND
GND
ADC0 PWM4 1
ADC1 INT5/PWM3 2 J4
ADC2 INT4/PWM2 3
C6 ADC3 TX0/PWM1 PS/O22
15p
Driver EM422S X11 Driver EM422S X12
ADC4/TCK RX0/PWM0 PUL+ VCC 1 PUL+ VCC 1
ADC5/TMS J3 J4
X1 R6 XTAL2 PUL- GND 2 PUL- GND 2
8MHz 1M ADC6/TDO PCINT10/TXD3 1 42CM06 1 42CM06
XTAL1 A+ A+
ADC7/TDI PCINT9/RXD3 2 DIR+ A+ 2 DIR+ A+
C7 ADC8/PCINT16 TXD20
3
DIR- A- A- M M3
3
DIR- A- A- M M4
15p
ADC9/PCINT17 RXD2 B+ B+
GND ENA+ B+ ENA+ B+
ADC10/PCINT18 IN3/TXD1 B- B-
ENA- B- ENA- B-
ADC11/PCINT19 INT2/RXD1
GND GND
ADC12/PCINT20 INT1/SDA
ADC13/PCINT21 INT0/SCL
ADC14/PCINT22
ADC15/PCINT23
Mega 2560 KHỐI CẢM BIẾN
PS/K1 Black Vout
X5
1 USB 2.0 Type B
1 Brown VCC LJ12A3-4-Z
Blue GND
2
Computer USB MCU 2
X13 NGHIÊN CỨU THIẾT KẾ MÁY QUÉT TIÊU BẢN ĐỒ ÁN TỐT NGHIỆP
Chức năng Họ và tên Chữ ký Ngày Số lượng Khối lượng Tỷ lệ
Laptop Dell Arduino Mega 2560 Thiết kế Nguyễn Hoàng Lâm
1
BẢN VẼ ĐIỆN
Hướng dẫn Phùng Trí Công Tờ: 01 Số tờ: 01
Duyệt Đại Học Bách Khoa
TP HCM
Mục tiêu:
- Nghiên cứu, tìm hiểu quy trình ứng dụng của
NGHIÊN CỨU THIẾT KẾ MÁY QUÉT máy quét tiêu bản
- Thiết kế cơ khí cho máy quét tiêu bản
TIÊU BẢN
- Thiết kế hệ thống điện cho máy quét tiêu bản
- Mô phỏng nguyên lý hoạt động của máy quét tiêu bản
LỰA CHỌN PHƯƠNG ÁN LỰA CHỌN PHƯƠNG ÁN LỰA CHỌN PHƯƠNG ÁN
CƠ KHÍ ĐIỆN ĐI U KHI N
Đ NG CƠ CƠ C U D N Đ NG CƠ C U THA TÁC B ĐI U KHI N NGUỒN ĐIỆN CẢM BIẾN GIA DIỆN ĐI U KHI N TR NH TỰ H T Đ NG HỆ THỐNG
Yêu cầu Yêu cầu Yêu cầu Yêu cầu
Yêu cầu Yêu cầu Yêu cầu Yêu cầu
- Cung cấp đủ momen xoắn - Đáp ứng đúng nhu cầu - Cấp xung điều khiển động cơ
- Độ bền cao - Giao diện có đầy đủ các chức - Tối ưu hóa thời gian
- Kiểm soát tốc độ và vị trí chuyển động của từng trục - Giao tiếp được với máy tính - Nguồn điện ổn định - Hoạt động ổn định năng
- Đảm bảo hiệu suất - Đảm bảo an toàn
với độ chính xác cao - Hiệu suất hoạt động cao - Nhỏ gọn - Đủ cung cấp duy trì điện cho - Độ bền cao
- Giá thành phù hợp - Điều khiển toàn bộ hệ thống - Cho ra kết quả tốt nhất
- Nhỏ gọn - Giá thành phù hợp - Ổn định, ít bị nhiễu các thiết bị - Đảm bảo an toàn - Nhỏ gọn
- Dễ dàng sử dụng - Dễ dàng thực hiện, thao tác
1 Động cơ Servo 1 Cơ cấu vít me 1 Tay gắp khí nén 1 Vi điều khiển 1 Nguồn điện 220V 1 Cảm biến tiệm cận 1 Lập trình giao diện 1 Quét số lượng tiêu bản trước
Ưu điểm: Ưu điểm: Ưu điểm: Ưu điểm: khi tiến hành chụp ảnh
Ưu điểm: Ưu điểm:
- Cung cấp tốc độ cao và vị - Độ chính xác cao - Giá thành thấp Ưu điểm: - Hoạt động ổn định trong
- Giá thành rẻ -Tùy biến thêm chức năng Ưu điểm:
trí chính xác - Hiệu xuất truyền tải cao - Giao tiếp được với máy tính - Sử dụng được các thiết bị với nhiều môi trường khác nhau
- Công suất hoạt động cao -Giao diện phù hợp với mục - Hiệu chỉnh được đường hàn
Nhược điểm: - Ít ăn mòn, hoạt động lâu dài - Hỗ trợ nhiều chuẩn giao tiếp công suất lớn - Hoạt động đơn giản
Nhược điểm: đích sử dụng - Kiểm tra được sai sót trước
- Servo giá thành cao Nhược điểm: Nhược điểm: - Lấy điện trực tiếp từ ổ điện - Độ bền cao
- Giới hạn trong việc điều Nhược điểm: khi tiến hành quét
- Dễ bị nhiễu - Giá thành cao - Không tương thích với một số Nhược điểm: Nhược điểm:
khiển vị trí và lực -Chương trình phức tạp Nhược điểm:
-Điều khiển phức tạp - Không phù hợp cho độ dài thiết bị công nghiệp - Gây nguy hiểm nếu bị rò điện - Giới hạn về khoảng cách hoạt
- Cần nguồn cung cấp khí nén -Thiếu tính năng đặc biệt hãng - Tốn nhiều thời gian
hành trình lớn động
2 Động cơ bước 2 PLC
2 Nguồn tổ ong 2 V 10A 2 Sử dụng phần mềm của hãng 2 Song song giữa việc quét số
Ưu điểm: Ưu điểm: 2 Modun Máy ảnh lượng và tiến hành chụp ảnh
Ưu điểm: 2 Thanh răng bánh răng 2 Tay gắp thuỷ lực Ưu điểm:
- Giao tiếp dễ dàng với các - Ít gây nguy hiểm
- Điều khiển chính xác Ưu điểm: Ưu điểm: Ưu điểm: - Được hỗ trợ từ hãng
thiết bị công nghiệp - Thích hợp với các động cơ - Giá thành rẻ hơn so với Ưu điểm:
- Đơn giản quá trình điều khiển - Hiệu suất truyền tải cao - Công suất gắp lớn - Tương thích tốt với robot
- Độ chính xác cao bước, cảm biến camera công nghiệp - Rút ngắn được thời gian
- Giá thành hợp lý - Tải trọng lớn - Thích hợp cho ứng dụng nặng - Đầy đủ các chức năng
Nhược điểm: Nhược điểm: - Điều chỉnh được các thông số - Nhược điểm:
Nhược điểm: Nhược điểm: Nhược điểm: Nhược điểm:
- Giá thành cao Nhược điểm: - Dễ xảy ra sai số
- Xảy ra hiện tượng trượt bước - Giá thành cao - Chi phí bảo trì cao - Phát sinh thêm chi phí so với - Giá thành cao, không hỗ trợ
- Kích thước lớn - Thiếu độ bền và khả năng - Lập trình phức tạp
- Xảy ra hiện tượng ăn mòn - Không phù hợp cho môi dùng điện trực tiếp các robot cũ
khi làm việc trong thời gian dài trường sạch sẽ và y tế chống chịu đủ để sử dụng
Động cơ AC Kết luận: chọn phương án 1, cả trong môi trường công nghiệp
Ưu điểm: 2 phương án đều đáp ứng được Kết luận: chọn phương án 2, vì Kết luận: chọn phương án 2, vì
- Giá thành rẻ yêu cầu, vì VĐK nhỏ gọn và giá sử dụng động cơ bước và cảm tương thích tốt với các thiết bị Kết luận: chọn phương án 1,
Máy ảnh công nghiệp thời gian xử lý không quá lâu,
- Độ chính xác thấp thành rẻ hơn nên lựa chọn biến
Truyền động đai Tay gắp điện Ưu điểm:
- Kết hợp được hộp số bước an toàn cho hệ thống
Ưu điểm: - Độ chính xác cao, độ phân
Nhược điểm:
- Giá thành thấp Ưu điểm: giải ảnh cao và ít nhiễu
- Dùng điện 220V nên nếu bị
- Kích thước bộ truyền dễ thay đổi - Tốc độ cao - Điều chỉnh được các thông số
nhiễu rất nguy hiểm
Nhược điểm: - Điều khiển linh hoạt Nhược điểm:
- Xảy ra hiện tượng giãn đai theo Nhược điểm: - Giá thành cao
thời gian - Giá thành cao
Kết luận: Chọn động cơ bước
- Công suất gắp thấp
đảm bảo sai số ,thiết bị không
quay nhanh và tối ưu chi phí Kết luận: chọn phương án 1, vì
cảm biến tiệm cận phù hợp với
Truyền động bánh răng Tay gắp nam châm các tiêu chí đặt ra
Ưu điểm:
Ưu điểm: - Hoạt động trong không gian hẹp
- Kích thước nhỏ - Đơn giản và hiệu suất cao
- Sức tải lớn
- Kinh phí bảo trì thấp
- Độ bền lớn và tuổi thọ cao
Nhược điểm:
Nhược điểm:
- Sản phẩm có thể bị văng nếu di Ghi chú
- Gây tiếng ồn khi hoạt động
chuyển quá nhanh
- Chỉ gắp được sản phẩm có từ tính Phương án được chọn
Kết luận: Phương án không được chọn
- Chọn phương án 1 cho trục Kết luận:
chuyển động X-Y vì thiết bị cần độ Sử dụng tap gắp nam châm vì sản
chính xác lớn, hoạt động lâu dài và phẩm ở trong không gian hẹp
không cần chịu tải nặng
- Chọn phương án 2 cho tụ lọc vì
cần điều chỉnh kích thước bộ lọc
cho phù hợp
- Chọn bộ truyền bánh răng cho
măm xoay vì cần kích thước nhỏ
gọn và độ bền cao NGHIÊN CỨU THIẾT KẾ MÁY QUÉT TIÊU BẢN ĐỒ ÁN TỐT NGHIỆP
Chức năng Họ và tên Chữ ký Ngày Số lượng Khối lượng Tỷ lệ
Thiết kế Nguyễn Hoàng Lâm
BẢN VẼ LỰA CHỌN 1
Hướng dẫn Phùng Trí Công PHƯƠNG ÁN Tờ: 01 Số tờ: 01
Duyệt Đại Học Bách Khoa
TP HCM
Đếm số lượng tiêu bản được Di chuyển cơ cấu thao tác Di chuyển tiêu bản tới
Chương trình chính Thiết lập thiết bị
đặt vào khung tới vị trí tiêu bản vị trí chụp ảnh
Thiết lập thiết bị Đếm số lượng tiêu bản Di chuyển cơ cấu thao Di chuyển tiêu bản tới
Bắt đầu
được đặt vào khung tác tới vị trí tiêu bản vị trí chụp ảnh
Di chuyển cảm biến theo
Thiết lập loại đèn huỳnh Tính toán số xung cần Tính toán số xung cần
Thiết lập thiết bị quang cho từng tiêu bản trục X đi qua từng vị trí
thiết cho động cơ bước thiết cho động cơ bước
đặt tiêu bản
Cảm biến xác nhận tiêu
Đếm số lượng tiêu bản Thiết lập loại kính lọc Di chuyển cơ cấu thao tác Di chuyển cơ cấu thao tác
bản có ở vị trí hiện tại và
được đặt vào khung trên tụ lọc từng tiêu bản theo trục X theo trục X
lưu lại giá trị vị trí
Thiết lập loại vật kính
Di chuyển cơ cấu thao tác S Di chuyển cơ cấu thao tác Di chuyển cơ cấu thao tác
trên măm xoay cho từng Đủ 10 vị trí ?
tới vị trí tiêu bản theo trục Y theo trục Y
loại tiêu bản
Đ
Di chuyển tiêu bản tới vị Trở về chương Trở về chương Trở về chương Trở về chương
trí chụp ảnh trình chính trình chính trình chính trình chính
Phát sáng đèn
huỳnh quang
Xoay tụ lọc Xoay măm xoay Tiến hành chụp ảnh Di chuyển tiêu bản về
vị trí ban đầu
Xoay măm xoay
Xoay tụ lọc Xoay măm xoay Tiến hành chụp ảnh Di chuyển tiêu bản về
vị trí ban đầu
Xoay tụ lọc
Arduino cấp xung, điều Chụp ảnh sau khi các
Arduino cấp xung, điều Tính toán số xung cần
khiển động cơ xoay thiết bị khác đã được
khiển động cơ xoay tụ lọc set up thiết cho động cơ bước
măm xoay
Tắt đèn huỳnh quang
Xoay kính lọc tới vị trí Xoay vật kính tới vị Di chuyển cơ cấu thao tác
Gửi ảnh lên server
đã chọn trước đó trí đã chọn trước đó theo trục X
Tiến hành chụp ảnh
Trở về chương Trở về chương Trở về chương Di chuyển cơ cấu thao tác
trình chính trình chính trình chính theo trục Y
Di chuyển tiêu bản về vị
trí ban đầu
Trở về chương
trình chính
S Đủ số lượng
tiêu bản
Đ
Kết thúc NGHIÊN CỨU THIẾT KẾ MÁY QUÉT TIÊU BẢN ĐỒ ÁN TỐT NGHIỆP
Chức năng Họ và tên Chữ ký Ngày Số lượng Khối lượng Tỷ lệ
Thiết kế Nguyễn Hoàng Lâm
BẢN VẼ LƯU ĐỒ 1
Hướng dẫn Phùng Trí Công GIẢI THUẬT Tờ: 01 Số tờ: 01
Duyệt Đại Học Bách Khoa
TP HCM
105
1 Chi tiet A ( 2:1 )
B
3
Chi tiet B ( 2:1 )
4
5
124
6 A
148
C 7
60
Chi tiet D ( 2:1 )
9
Chi tiet C ( 2:1 )
69
10
815
162
Chi tiet E ( 2:1 ) Chi tiet F ( 2:1 )
E
11
40
12
110
Chi tiet G ( 2:1 ) Chi tiet H ( 2:1 )
G
F
121
140 17
10 65 178 93 55 10
414 177
80 76
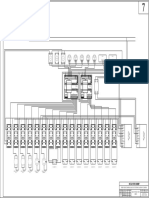
14 Slide 10
13 Slide Holder 10
12 Tấm đế 1
11 Khung giữ hộp đựng Slide 1
10 Hộp đựng Slide 1
9 Đèn Led 100 1
13 14 8 Măm xoay 1
52
7 Đèn huỳnh quang Colibri 7 1
6 Cơ cấu vít me X-Y 1
82 5 Bu lông lục giác đầu dù M3x10 1
4 Tụ lọc 1
3 Ke góc 40x40 16
76
2 Khung nhôm định hình 40x40x390 4
45
1 Khung nhôm định hình 40x40x700 4
STT Ký hiệu Tên gọi SL Vật liệu Ghi chú
NGHIÊN CỨU THIẾT KẾ MÁY QUÉT TIÊU BẢN ĐỒ ÁN TỐT NGHIỆP
Chức năng Họ và tên Chữ ký Ngày Số lượng Khối lượng Tỷ lệ
Thiết kế Nguyễn Hoàng Lâm
BẢN VẼ LẮP 1 1:3
Hướng dẫn Phùng Trí Công MÁY QUÉT TIÊU BẢN Tờ: 01 Số tờ: 01
Duyệt Đại Học Bách Khoa
TP HCM
266 26 27 28 29 30 31 32 33 34
1 3 10 27 26 7
173
2 40 102 88 90 90 E-E ( 2:1 )
3 D ∅22 H7
C F
∅8 k6
4
E D-D ( 2:1 )
35 ∅5 H7/k6
5
84
36
6
10
37
7 38
20
60
8
20
9
10
C C
35
G ∅8 k6
∅22 H7
25
93 72
21
230
B 22 75 30 75
Chi tiet F ( 2:1 )
A A
16 23 Chi tiet E ( 2:1 )
15 15 10 24
5 60 77 83 5
C-C ( 1:1 )
8
25 E
26
40
27
563
376
10
10
7 13 7
Chi tiet G ( 2:1 )
25 5x25=125 3 D
470
25x16=400
180
A
80
10 11 12 13 14 15 16 17 18 19
D
R10
R9
0
E
39 40 41 42 43 44 45
F-F ( 1:1 )
B
20 55 67
A 20 10
20
7 27 10 F F
11 20 11
Chi tiet B ( 4:1 )
43 Chi tiet A ( 4:1 )
38
46 21 20 21
47
48
49 G G
B-B ( 2:1 )
A-A ( 2:1 )
G-G ( 1:1 )
∅116 k6
∅12 k6
∅12 k6
25 Trục vít me ∅8 1
∅16 k6
24 Tấm gá thanh trượt 4 1
15 124 30 56 23 Hộp gá đai ốc vít me ∅8 1
22 Đai ốc vít me ∅8 1
212 21 Bu lông lục giác đầu dù M4x10 4
20 Tấm gá thanh trượt 3 1
19 Thanh trượt 2 1
18 Bu lông lục giác đầu dù M3x40 8
49 6
Chi tiet B ( 2:1 ) 48
Vật kính hiển vi
Bánh răng bị dẫn 1
17
16
Con trượt
Hộp gá đai ốc vít me ∅5
2
1
47 Bánh răng dẫn động 1 Thép tấm SS400 15 Đai ốc vít me ∅5 1
46 Tấm gá động cơ 1 Thép tấm SS400 14 Thanh nhôm định hình 40x80x200 1
45 Khung măm xoay 1 Thép tấm SS400
Chi tiet A ( 2:1 ) 44 Bu lông lục giác đầu cầu M12x6 2 Inox 304
13
12
Bulong lục giác đầu dù M3x10
Tấm gá thanh trượt 2
4
1 Thép tấm SS400
Chi tiet C ( 2:1 ) Chi tiet D ( 2:1 ) 43 Bu lông + vòng đệm + đai ốc M3x15 2 Inox 304 11 Trục vít me ∅5 1
o
42 Tấm gá 15 1 Thép tấm SS400 10 Cơ cấu thao tác 1 Thép hộp
A
41 Bu lông + vòng đệm + đai ốc M3x10 4 Inox 304 9 Thanh trượt 1 1
B B
40 Bu lông lục giác đầu dù M3x6 4 Inox 304 8 Thanh nhôm định hình 40x80x455 1
39 20CM003 Động cơ bước Leadshine 20CM003 1 7 Vòng bi 8mm 2
∅17 H7
∅5 k6
38 Tấm gá kính nghiêng 45o 1 Thép tấm SS400 6 Tấm gá thanh trượt 1 1
∅17 H7
37 Khung tụ lọc 3
∅5 k6
1 Thép tấm SS400 5 Nối trục M5xM8 1
36 Khung tụ lọc 2 1 Thép tấm SS400 4 Vít trí M4 4
35 Khung tụ lọc 1 1 Thép tấm SS400 3 Tấm gá động cơ 2 Thép tấm SS400
34 Trục ∅8 1 Thép C45 2 Bu lông lục giác đầu dù M3x6 8 Inox 304
33 Bu lông + vòng đệm + đai ốc M3x30 2 Inox 304 1 20CM003 Động cơ bước Leadshine 20CM003 2
32 5M40-16 Bánh đai bị dẫn 40 răng 1
STT Ký hiệu Tên gọi SL Vật liệu Ghi chú
31 ĐĨa xoay 1 Thép tấm SS400
30 HTD 310-5M Dây đai răng 1 NGHIÊN CỨU THIẾT KẾ MÁY QUÉT TIÊU BẢN ĐỒ ÁN TỐT NGHIỆP
29 5M12-16 Bánh đai răng dẫn 12 răng 1 Chức năng Họ và tên Chữ ký Ngày Số lượng Khối lượng Tỷ lệ
Thiết kế Nguyễn Hoàng Lâm
∅8 k6 28 42CM006 Động cơ bước Leadshine 42CM006 1 BẢN VẼ LẮP 1 1:3
∅22 H7
A 27 Bu lông lục giác đầu dù M3x6 4 Inox 304 Hướng dẫn Phùng Trí Công CƠ CẤU VÍT ME X-Y Tờ: 01 Số tờ: 01
26 Bu lông lục giác đầu dù M3x10 12 Inox 304 Duyệt Đại Học Bách Khoa
STT Ký hiệu Tên gọi SL Vật liệu Ghi chú TP HCM
You might also like
- 2 Gen - 1 Ats - So Do AtsDocument1 page2 Gen - 1 Ats - So Do AtsQUANG NGONo ratings yet
- Tien 4-1 Okuma Wiring DiagramDocument1 pageTien 4-1 Okuma Wiring DiagramcoronaqcNo ratings yet
- Sol 10Document1 pageSol 10Corrado BrianteNo ratings yet
- 5 .Phuong Phap Dau Day Trong Mach Dieu Khien - PBL3Document10 pages5 .Phuong Phap Dau Day Trong Mach Dieu Khien - PBL3NganNo ratings yet
- Bản vẽ điệnDocument1 pageBản vẽ điệnMinh Lâm QuốcNo ratings yet
- Đề 1 EE2110 cuối kỳ 2021 2 1Document1 pageĐề 1 EE2110 cuối kỳ 2021 2 1maihoangquocan2003No ratings yet
- Nguyên lí hoạt động của các linh kiện điện tử cơ bản và một số mạch ứng dụngDocument4 pagesNguyên lí hoạt động của các linh kiện điện tử cơ bản và một số mạch ứng dụngLê Đăng KhoaNo ratings yet
- 1 2Document1 page1 2đạtNo ratings yet
- Sơ Đ BBĐ AC-ACDocument1 pageSơ Đ BBĐ AC-ACĐông NguyễnNo ratings yet
- 1-15 MergedDocument15 pages1-15 MergedDong BuiNo ratings yet
- Dem Lui Khong Dong Bo 26.11Document26 pagesDem Lui Khong Dong Bo 26.11Lê Duy HiệuNo ratings yet
- 08 Toshiba 2chieuDocument1 page08 Toshiba 2chieuNelson BoneNo ratings yet
- Sơ đồ đấu nối điệnDocument1 pageSơ đồ đấu nối điệnbn conga2015No ratings yet
- Bài 5Document12 pagesBài 5Nguyễn HùngNo ratings yet
- BÁO CÁO THÍ NGHIỆMDocument19 pagesBÁO CÁO THÍ NGHIỆManhkietsuper123No ratings yet
- Đề 1Document4 pagesĐề 1maiducbinh.lop9a8No ratings yet
- OTL VisaiDocument46 pagesOTL VisaiNguyễn HuyNo ratings yet
- Chuong 8 - Ung Dung Cua Cac Bo BD DTCS 1Document29 pagesChuong 8 - Ung Dung Cua Cac Bo BD DTCS 1Văn TiếnNo ratings yet
- Thuc-Tap-Co-Ban - BC - (Cuuduongthancong - Com)Document5 pagesThuc-Tap-Co-Ban - BC - (Cuuduongthancong - Com)Trường Nguyễn TiếnNo ratings yet
- Bản Vẽ Tủ Test VCB,LBS Cập Nhật 31032022Document8 pagesBản Vẽ Tủ Test VCB,LBS Cập Nhật 31032022The GunnersNo ratings yet
- SOC210 Thiên NamDocument11 pagesSOC210 Thiên NamĐạt Vũ ÍchNo ratings yet
- Banvedien SUA11Document1 pageBanvedien SUA11Trọng hậu TrầnNo ratings yet
- Ban Ve Nhi Thu - Cho MoiDocument47 pagesBan Ve Nhi Thu - Cho MoiBùi Thanh SơnNo ratings yet
- Banveso 7Document1 pageBanveso 7Nhân Nguyễn Khoa QuangNo ratings yet
- Mạch điều khiển biến tầnDocument1 pageMạch điều khiển biến tầnNam Đẹp TraiNo ratings yet
- Bài thực hành số 3. Thiết kế giao diện đo lường và điều khiển trên máy tính bằng Visual Studio 2010Document5 pagesBài thực hành số 3. Thiết kế giao diện đo lường và điều khiển trên máy tính bằng Visual Studio 2010Lâm PhạmNo ratings yet
- Nhà Thông MinhDocument1 pageNhà Thông Minhthebao.uttNo ratings yet
- Xây dựng hệ Stereo Camera: Báo CáoDocument9 pagesXây dựng hệ Stereo Camera: Báo CáoThông VõNo ratings yet
- 90VN 90VU X11/5D X11/4D +24V: Power Supply CNC / PLCDocument1 page90VN 90VU X11/5D X11/4D +24V: Power Supply CNC / PLCLê Kim HàoNo ratings yet
- So Do Mach - 1Document6 pagesSo Do Mach - 1duchiduongNo ratings yet
- T19E040Document12 pagesT19E040Hong Nguyen MaiNo ratings yet
- M CH Đ NG L C - NewDocument1 pageM CH Đ NG L C - Newninh trầnNo ratings yet
- M CH L C 1 ModelDocument1 pageM CH L C 1 ModelNam Đẹp TraiNo ratings yet
- Kiem Tra Lan 2Document2 pagesKiem Tra Lan 2Lê Tuấn AnhNo ratings yet
- Bao Cao Do An Tot Nghiep - Tham KhaoDocument31 pagesBao Cao Do An Tot Nghiep - Tham KhaoHùng TrầnNo ratings yet
- 5Document1 page5Tuấn Nguễn VănNo ratings yet
- stm8 De4Document1 pagestm8 De4sắn LêNo ratings yet
- Thiết Kế Mạch Điện Tử 1 - TC - CK1 - 21-22 - 7h30 - 10-1-2022Document2 pagesThiết Kế Mạch Điện Tử 1 - TC - CK1 - 21-22 - 7h30 - 10-1-2022Phạm Thị Thu HàNo ratings yet
- Luoi Dien 06b - Đư NG Dây DàiDocument15 pagesLuoi Dien 06b - Đư NG Dây DàiNguyễn Thế ViệtNo ratings yet
- BientanDocument1 pageBientanTran Tiep Phuc NguyenNo ratings yet
- Chương 6Document4 pagesChương 6Nguyen Dang KhoaNo ratings yet
- Diep A1 5Document1 pageDiep A1 5M MNo ratings yet
- BTL Cad CamDocument21 pagesBTL Cad CamKenshin BkNo ratings yet
- Bài tập tính trụcDocument4 pagesBài tập tính trụcThinh NguyenNo ratings yet
- Ky Thuat VI Dieu Khien - de ThiDocument3 pagesKy Thuat VI Dieu Khien - de ThiLê Mạnh KhánhNo ratings yet
- Bai Tap Cad - Cam d20dtDocument21 pagesBai Tap Cad - Cam d20dtMinh ĐoànNo ratings yet
- C3-So Do Va Nguyen Ly Hoat DongDocument7 pagesC3-So Do Va Nguyen Ly Hoat DongPhiPhiNo ratings yet
- Bài 11Document1 pageBài 11huuduongbpqnNo ratings yet
- TT Dien Dien Tu 1 ProteusDocument33 pagesTT Dien Dien Tu 1 Proteus07-Vũ Hoàng AnhNo ratings yet
- E-00-101 SDNL TONG THE R6-ModelDocument1 pageE-00-101 SDNL TONG THE R6-ModelHướng Trần MinhNo ratings yet
- 8. Thiết kế trụcDocument3 pages8. Thiết kế trụctrung uyên nguyễnNo ratings yet
- Đề 6Document5 pagesĐề 6maiducbinh.lop9a8No ratings yet
- TT Dien Dien Tu 1 ProteusDocument33 pagesTT Dien Dien Tu 1 ProteusNghi LeNo ratings yet
- bản vẽ sơ đồ nối dâyDocument1 pagebản vẽ sơ đồ nối dâyPhongNo ratings yet
- TT Dien Dien Tu 1 ProteusDocument34 pagesTT Dien Dien Tu 1 ProteusDuong NamNo ratings yet
- HT DienDocument1 pageHT DienQuốc HuyNo ratings yet
- bản vẽ đấu nốiDocument1 pagebản vẽ đấu nốiDuy Huấn HoàngNo ratings yet
- Page04 - Main PowerDocument1 pagePage04 - Main PowerLê Kim HàoNo ratings yet
- 300-450 bản dịchDocument151 pages300-450 bản dịchbuichivu04No ratings yet