Download as pdf or txt
You might also like
- MathWorks Interview ProcessDocument2 pagesMathWorks Interview ProcessPawan Singh100% (1)
- ADR Law of 2004Document8 pagesADR Law of 2004Anonymous MikI28PkJcNo ratings yet
- Semi-Active Structural Vibration Control With Magnetorheological Damper Based On Hybrid Fuzzy Sliding Mode ControllerDocument12 pagesSemi-Active Structural Vibration Control With Magnetorheological Damper Based On Hybrid Fuzzy Sliding Mode ControllerIAES International Journal of Robotics and AutomationNo ratings yet
- Active Vibration Damping in Hydraulic Construction MachineryDocument15 pagesActive Vibration Damping in Hydraulic Construction MachineryCristian QuituizacaNo ratings yet
- Predictive Control of Seismic Structures LuDocument22 pagesPredictive Control of Seismic Structures LuDiegoHenaoLeonNo ratings yet
- Mechatronics: Haoyong Yu, Sunan Huang, Gong Chen, Nitish ThakorDocument12 pagesMechatronics: Haoyong Yu, Sunan Huang, Gong Chen, Nitish ThakorebrahimpanNo ratings yet
- P19ENC BuildingsDocument30 pagesP19ENC BuildingsEduardo Nuñez CastellanosNo ratings yet
- 1 s2.0 S0307904X12001114 MainDocument24 pages1 s2.0 S0307904X12001114 Mainmohammad beheshtiNo ratings yet
- Performance Analysis of A Low-Speed High-Torque Hydrostatic Transmission UnitDocument61 pagesPerformance Analysis of A Low-Speed High-Torque Hydrostatic Transmission UnitbrunosamaeianNo ratings yet
- Editorial: Vibration and Control in Structures Under Single and Multiple HazardsDocument3 pagesEditorial: Vibration and Control in Structures Under Single and Multiple Hazardsalaga4000No ratings yet
- Fabrication of Electromagnetic DamperDocument9 pagesFabrication of Electromagnetic DamperIJRASETPublicationsNo ratings yet
- Semiactive ControlDocument8 pagesSemiactive ControlRui CbNo ratings yet
- Seismic Performance of 245 KV Current Transformer: September 2012Document7 pagesSeismic Performance of 245 KV Current Transformer: September 2012Farah Diba Pos-PosNo ratings yet
- Optimal Control and Performance of Variable Stiffness Devices For Structural ControlDocument6 pagesOptimal Control and Performance of Variable Stiffness Devices For Structural ControlTimotius Yonathan SunarsaNo ratings yet
- Sensors 22 04273 v2Document27 pagesSensors 22 04273 v2Sandro SouzaNo ratings yet
- Engineering Structures: SciencedirectDocument13 pagesEngineering Structures: Sciencedirectyasemin bürüngüzNo ratings yet
- Modeling of Soft Fluidic Actuators Using Fluid-Structure Interaction Simulations With Underwater ApplicationsDocument12 pagesModeling of Soft Fluidic Actuators Using Fluid-Structure Interaction Simulations With Underwater Applicationsgus.sukkasigNo ratings yet
- Mechanical Systems and Signal ProcessingDocument20 pagesMechanical Systems and Signal ProcessingVijay MylswamyNo ratings yet
- Modelo y Dinamismo de Una Turbina de BulboDocument21 pagesModelo y Dinamismo de Una Turbina de BulboJudith Ivett Cadena FernandezNo ratings yet
- 1 s2.0 S0957415821000830 MainDocument13 pages1 s2.0 S0957415821000830 MainBrunoNo ratings yet
- Variable Semi-Active Friction Dampers For Seismic Control of StructuresDocument31 pagesVariable Semi-Active Friction Dampers For Seismic Control of StructuresShreeyank SamudreNo ratings yet
- Structural Contr HLTH - 2018 - Zhang - Bidirectional Wind Response Control of 76 Story Benchmark Building Using ActiveDocument14 pagesStructural Contr HLTH - 2018 - Zhang - Bidirectional Wind Response Control of 76 Story Benchmark Building Using Activevishal.patelNo ratings yet
- Camerareadypaper-ICMIEE 2022 PaperID-065Document7 pagesCamerareadypaper-ICMIEE 2022 PaperID-065John Frank ValenzonaNo ratings yet
- 10 A Comparative Study of Two Common Pump-Controlled Hydraulic Circuits For Single Rod Actuator Actuators-12-00193Document13 pages10 A Comparative Study of Two Common Pump-Controlled Hydraulic Circuits For Single Rod Actuator Actuators-12-00193Ahmed ImamNo ratings yet
- Some Experimental Force Analysis For Automation ofDocument7 pagesSome Experimental Force Analysis For Automation ofTharinduNo ratings yet
- Hydraulic Systems Used For Pitch Control of Wind TDocument9 pagesHydraulic Systems Used For Pitch Control of Wind TMubtazNo ratings yet
- Energy Conversion and ManagementDocument13 pagesEnergy Conversion and ManagementMohammadreza NaghaviNo ratings yet
- Bladeless Wind Power Generation6Document7 pagesBladeless Wind Power Generation6Megha LakhawatNo ratings yet
- Earthq Engng Struct Dyn - 2013 - KammulaDocument20 pagesEarthq Engng Struct Dyn - 2013 - Kammulagopa dasNo ratings yet
- Experimental Aspects in The Vibration-Based Condition of Large HydrogeneratorsDocument15 pagesExperimental Aspects in The Vibration-Based Condition of Large HydrogeneratorsGeraldo Carvalho Brito Jr.No ratings yet
- Development of A Divergent Fluid Wall Damper For FDocument19 pagesDevelopment of A Divergent Fluid Wall Damper For FAhmed BadrNo ratings yet
- Torque Characteristics of Guide Vanes Protection Device of Francis Turbine in Hydropower PlantDocument16 pagesTorque Characteristics of Guide Vanes Protection Device of Francis Turbine in Hydropower PlantSaulo Salve PaggiaroNo ratings yet
- 2010-Fan C.C-Fluid Ind Inst Elim of Rot-B Sys With EM Exciter-Intl JMSDocument9 pages2010-Fan C.C-Fluid Ind Inst Elim of Rot-B Sys With EM Exciter-Intl JMSAlex CooperNo ratings yet
- Research On The Performance of Hydraulic Vibratory Hammer With Coupled Dynamic ModelDocument12 pagesResearch On The Performance of Hydraulic Vibratory Hammer With Coupled Dynamic ModelCHARLIE LEUNGNo ratings yet
- A Novel Fault Diagnosis Method Based On SWT andDocument29 pagesA Novel Fault Diagnosis Method Based On SWT andDamigo DiegoNo ratings yet
- 1 OnlineDocument21 pages1 OnlineBành Đức MinhNo ratings yet
- Design of A Wearable Perturbator For Human KneeDocument6 pagesDesign of A Wearable Perturbator For Human KneeYuNo ratings yet
- Computers & Fluids: M. Sergio Campobasso, Andreas Piskopakis, Jernej Drofelnik, Adrian JacksonDocument20 pagesComputers & Fluids: M. Sergio Campobasso, Andreas Piskopakis, Jernej Drofelnik, Adrian JacksonRomizNo ratings yet
- 2008 Truong QFTDocument20 pages2008 Truong QFTCumhur ÖzbaşNo ratings yet
- Derakhshandeh, J.F. (2016)Document15 pagesDerakhshandeh, J.F. (2016)Fernando Augusto Alves MendesNo ratings yet
- Computer Aided Civil Eng - 2015 - Hejazi - Analytical Model For Viscous Wall DampersDocument19 pagesComputer Aided Civil Eng - 2015 - Hejazi - Analytical Model For Viscous Wall Damperskguse2bNo ratings yet
- Investigation On The Design of Double-Stage Scissor Lifts Based On Parametric Dimension TechniqueDocument19 pagesInvestigation On The Design of Double-Stage Scissor Lifts Based On Parametric Dimension TechniqueGogyNo ratings yet
- Feasibility of Implementing Water Tank As Passive Tuned Mass DamperDocument8 pagesFeasibility of Implementing Water Tank As Passive Tuned Mass Damperjay76123123No ratings yet
- Classification of Wear State For A Positive Displacement Pump Using Deep Machine LearningDocument19 pagesClassification of Wear State For A Positive Displacement Pump Using Deep Machine LearningScience DirectNo ratings yet
- Seismic Protection of RC Frames Using Friction Dampers: A.K. SinhaDocument11 pagesSeismic Protection of RC Frames Using Friction Dampers: A.K. SinhaIAEME PublicationNo ratings yet
- Suspension Test RigDocument13 pagesSuspension Test RigPoonam Mankar100% (1)
- Comparative Study On Seismic Behavior of High-Rise Steel Building With and Without Friction Damper and Fluid Viscous Damper A ReviewDocument7 pagesComparative Study On Seismic Behavior of High-Rise Steel Building With and Without Friction Damper and Fluid Viscous Damper A ReviewIJRASETPublicationsNo ratings yet
- 4648 12994 1 SMvalidationDocument5 pages4648 12994 1 SMvalidationLeonardo RempelNo ratings yet
- 1 s2.0 S0266892020301016 MainDocument13 pages1 s2.0 S0266892020301016 MainRahul ChaudharyNo ratings yet
- Study and Analysis of Different Types of Dampers in Reducing The Vibration of StructureDocument9 pagesStudy and Analysis of Different Types of Dampers in Reducing The Vibration of StructureDivya MahalsekarNo ratings yet
- Structural Control System For Elevated Water Tank: Research PaperDocument4 pagesStructural Control System For Elevated Water Tank: Research PaperJOSMRIVERC100% (1)
- Experimental Vibration Level Analysis of A Francis TurbineDocument10 pagesExperimental Vibration Level Analysis of A Francis TurbineManel MontesinosNo ratings yet
- Applsci 11 04149 v2Document16 pagesApplsci 11 04149 v2Candra Ismail AlhakimNo ratings yet
- Soil Dynamics and Earthquake Engineering: Yiyao Jiang, Zhipeng Zhao, Ruifu Zhang, Dario de Domenico, Chao PanDocument10 pagesSoil Dynamics and Earthquake Engineering: Yiyao Jiang, Zhipeng Zhao, Ruifu Zhang, Dario de Domenico, Chao PanDhirendra Kumar PandeyNo ratings yet
- Computational Study To Assess The Influence of Overlap Ratio On Static Torque Characteristics of A Vertical Axis Wind TurbineDocument9 pagesComputational Study To Assess The Influence of Overlap Ratio On Static Torque Characteristics of A Vertical Axis Wind TurbineFAZAL ELLAHINo ratings yet
- Design and Analysis of Hydraulic Arm With GripperDocument6 pagesDesign and Analysis of Hydraulic Arm With GripperIJRASETPublicationsNo ratings yet
- Control of Flow Separation Over Naca 0015 Airfoil Using Synthetic Jet ActuatorsDocument13 pagesControl of Flow Separation Over Naca 0015 Airfoil Using Synthetic Jet ActuatorsVijayan SnNo ratings yet
- Robotics and Autonomous Systems: SciencedirectDocument14 pagesRobotics and Autonomous Systems: SciencedirectAmany KhaledNo ratings yet
- 3D Revolute JointDocument30 pages3D Revolute Jointhoaxyti76No ratings yet
- Lajss 2012 1 644854 1 737194Document18 pagesLajss 2012 1 644854 1 737194CristoferNo ratings yet
- Use of Viscous Dampers and Shock Transmission Units in The Seismic Protection of BuildingsDocument15 pagesUse of Viscous Dampers and Shock Transmission Units in The Seismic Protection of BuildingsAnju ParmarNo ratings yet
- Earthquake isolation method with variable natural frequencyFrom EverandEarthquake isolation method with variable natural frequencyNo ratings yet
- Hydraulic Cylinders: HC-01 A - UKDocument190 pagesHydraulic Cylinders: HC-01 A - UKEyasu demsewNo ratings yet
- Chapter 3 - Charging - SystemDocument59 pagesChapter 3 - Charging - SystemEyasu demsewNo ratings yet
- Car CarburetorsDocument20 pagesCar CarburetorsEyasu demsewNo ratings yet
- Preview ANSI+AGMA+2116-A05+ (R2011)Document7 pagesPreview ANSI+AGMA+2116-A05+ (R2011)Eyasu demsewNo ratings yet
- Bachelor Thesis: Czech Technical University in Prague Faculty of Mechanical Engineering Department of Process EngineeringDocument48 pagesBachelor Thesis: Czech Technical University in Prague Faculty of Mechanical Engineering Department of Process EngineeringEyasu demsewNo ratings yet
- BT JackDocument96 pagesBT JackEyasu demsewNo ratings yet
- Carburetor Work Booklet Week 12Document10 pagesCarburetor Work Booklet Week 12Eyasu demsewNo ratings yet
- CH - 1 Introduction To Pneumatics and Hydraulics SystemDocument60 pagesCH - 1 Introduction To Pneumatics and Hydraulics SystemEyasu demsewNo ratings yet
- Elyas FFFFFFFFFFFFFFFFFDocument44 pagesElyas FFFFFFFFFFFFFFFFFEyasu demsewNo ratings yet
- Dmu Report and ProjectDocument61 pagesDmu Report and ProjectEyasu demsewNo ratings yet
- Debre Markos University Institute of Technology: School of Mechanical & Industrial EngineeringDocument80 pagesDebre Markos University Institute of Technology: School of Mechanical & Industrial EngineeringEyasu demsewNo ratings yet
- Chinsaw 6Document47 pagesChinsaw 6Eyasu demsewNo ratings yet
- Math1011 - AssignmentDocument2 pagesMath1011 - AssignmentEyasu demsewNo ratings yet
- Chapter 5Document27 pagesChapter 5Eyasu demsewNo ratings yet
- Chapter 6Document37 pagesChapter 6Eyasu demsewNo ratings yet
- Manual HemocytometryDocument80 pagesManual HemocytometryEyasu demsewNo ratings yet
- Derivatives and Its ApplicationDocument32 pagesDerivatives and Its ApplicationFitawrary Alene TeferaNo ratings yet
- Chapter 4Document14 pagesChapter 4Eyasu demsew0% (1)
- Critical Short NotesDocument139 pagesCritical Short NotesEyasu demsewNo ratings yet
- Hematology Chap 12Document30 pagesHematology Chap 12Eyasu demsewNo ratings yet
- Packed Cell Volume (PCV)Document24 pagesPacked Cell Volume (PCV)Eyasu demsewNo ratings yet
- Chapter 3Document14 pagesChapter 3Eyasu demsewNo ratings yet
- Resume Awang AsykalDocument1 pageResume Awang AsykalAWANG ASYKAL AWANG AHMADNo ratings yet
- MAR 851 - Advanced Marine Engines & Power Plants NEWDocument71 pagesMAR 851 - Advanced Marine Engines & Power Plants NEWViolet PellyNo ratings yet
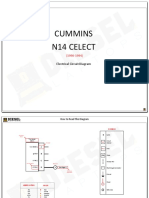
- Cummins N14 Celect: Electrical Circuit DiagramDocument9 pagesCummins N14 Celect: Electrical Circuit DiagramDiego Lira100% (1)
- Customer Satisfaction With Supermarket Retail ShoppingDocument4 pagesCustomer Satisfaction With Supermarket Retail ShoppingsankarpgsNo ratings yet
- Bidding ConditionsDocument6 pagesBidding ConditionsSonu SoniNo ratings yet
- Fortuner 15ym Spec Sheets - FinalDocument7 pagesFortuner 15ym Spec Sheets - Finalapi-3748395No ratings yet
- Working CapitalDocument39 pagesWorking CapitalHema LathaNo ratings yet
- Appendix C Steam TablesDocument8 pagesAppendix C Steam TablesWin Alfalah Nasution100% (1)
- Work Section BOQ-NRM2Document2 pagesWork Section BOQ-NRM2Arsalan AhmadNo ratings yet
- ACCOUNTING FOR CORPORATIONS-Basic ConsiderationsDocument41 pagesACCOUNTING FOR CORPORATIONS-Basic ConsiderationsMarriel Fate Cullano100% (2)
- Idx PDFDocument7 pagesIdx PDFflashtronNo ratings yet
- Rickly AquaCMD BrochureDocument2 pagesRickly AquaCMD BrochureCompras FisicoquimicoNo ratings yet
- Business Idea Contest OverviewDocument2 pagesBusiness Idea Contest OverviewBryan MendozaNo ratings yet
- Lesson 4a. Officer-Violator RelationshipDocument3 pagesLesson 4a. Officer-Violator RelationshipalliahnahNo ratings yet
- Obana Vs CaDocument4 pagesObana Vs Cada_sein32No ratings yet
- Limits, Fits and TolerancesDocument17 pagesLimits, Fits and TolerancesSarswati SuryawanshiNo ratings yet
- Automatic Blind Rivet Making PlantDocument4 pagesAutomatic Blind Rivet Making PlantsmarjanNo ratings yet
- Benítez Et Al 2012Document7 pagesBenítez Et Al 2012Gladys González GonzálezNo ratings yet
- Cheat Codes For Pokemon Mystery Dungeon - Explorers of Time On Nintendo DS - Codejunkies US4Document2 pagesCheat Codes For Pokemon Mystery Dungeon - Explorers of Time On Nintendo DS - Codejunkies US4degraded 4resterNo ratings yet
- The Role of SAI in Combating CorruptionDocument21 pagesThe Role of SAI in Combating CorruptionAdem SylejmaniNo ratings yet
- Draft Resolution 1.0Document5 pagesDraft Resolution 1.0Priya SubramanianNo ratings yet
- Self Care Deficit NCPDocument3 pagesSelf Care Deficit NCPJUSTIN ALZATENo ratings yet
- POETSPoster Aircraft 3Document2 pagesPOETSPoster Aircraft 3Khương Lê DuyNo ratings yet
- Global Marketing Important Questions Unit WiseDocument5 pagesGlobal Marketing Important Questions Unit Wisevaidyam rahulNo ratings yet
- Obdprog mt401 Pro Mileage Correction ToolDocument6 pagesObdprog mt401 Pro Mileage Correction ToolYounes YounesNo ratings yet
- Triplex HotDocument20 pagesTriplex HotСергей КартавицкийNo ratings yet
- Letters, Memoranda, Email, and Other Media For EngineersDocument5 pagesLetters, Memoranda, Email, and Other Media For EngineersOsama RashaydaNo ratings yet
- Comparative Study of Public and Private Telecom Wireless Services in IndiaDocument4 pagesComparative Study of Public and Private Telecom Wireless Services in Indiajonny bravoNo ratings yet