Download as docx, pdf, or txt
You might also like
- VESERA, Job Thesis ProposalDocument13 pagesVESERA, Job Thesis ProposalJob VeseraNo ratings yet
- SeminarDocument26 pagesSeminarAnzal ShanavasNo ratings yet
- Intership 2 (4-1)Document21 pagesIntership 2 (4-1)Srihari SrinivasanNo ratings yet
- Ventilator Report EditedDocument31 pagesVentilator Report Editednirajaadithya.dasireddiNo ratings yet
- Line Following Robt-1Document50 pagesLine Following Robt-1HariniNo ratings yet
- Solar CultivatorDocument41 pagesSolar CultivatorAnonymous ytZsBOVNo ratings yet
- Energy Efficiency of Mimo Ofdm System: A Project ReportDocument72 pagesEnergy Efficiency of Mimo Ofdm System: A Project ReportJaco MarketlandNo ratings yet
- Garbage SegregationDocument25 pagesGarbage Segregationeraasim64No ratings yet
- Satrack DocumentDocument40 pagesSatrack DocumentVamshi Dhar PoreddyNo ratings yet
- Pulse CompressionDocument55 pagesPulse CompressionMeena KNo ratings yet
- "Border Security Using Wireless Intigrated Network Sensor": (Exam No:)Document7 pages"Border Security Using Wireless Intigrated Network Sensor": (Exam No:)Amol GaikwadNo ratings yet
- Visvesvaraya Technological University: "Jnana Sangama", Belagavi-590018, KarnatakaDocument21 pagesVisvesvaraya Technological University: "Jnana Sangama", Belagavi-590018, KarnatakaPrajwal GowdaNo ratings yet
- GouravMisra ProjectThesis EngineeringDocument69 pagesGouravMisra ProjectThesis EngineeringAml LimaNo ratings yet
- SHAFreelast1 Space OpticDocument25 pagesSHAFreelast1 Space OpticSUMITH K SNo ratings yet
- Design of Broad Band and High Gain Microstrip Antenna Using MetamaterialsDocument58 pagesDesign of Broad Band and High Gain Microstrip Antenna Using MetamaterialsAli SalehNo ratings yet
- Final Project ReportsDocument44 pagesFinal Project ReportsJaco MarketlandNo ratings yet
- Technical Seminar Report-SampleDocument23 pagesTechnical Seminar Report-Samplearram mounika03No ratings yet
- Lidar: Seminar Report OnDocument5 pagesLidar: Seminar Report OnsureshjayarajNo ratings yet
- Reinforcement Learning For Autonomous Robots: Seminar Report ONDocument4 pagesReinforcement Learning For Autonomous Robots: Seminar Report ONNirmal KANo ratings yet
- Electronic Scan Weather Radar Scan StratDocument212 pagesElectronic Scan Weather Radar Scan StratRambabu KumarNo ratings yet
- Microstrip Pacth Antenna For X-Band Application ReportDocument34 pagesMicrostrip Pacth Antenna For X-Band Application ReportPriyanshu SinghNo ratings yet
- Last ReportDocument19 pagesLast ReportPratik SaindanePatilNo ratings yet
- CCCCCCCC CCCC: C CCCCCCCCCCCCCCCCCCCCCCCDocument16 pagesCCCCCCCC CCCC: C CCCCCCCCCCCCCCCCCCCCCCCPhanendra VarmaNo ratings yet
- BOOKLET RTFM KRNDocument75 pagesBOOKLET RTFM KRNJay SuryawanshiNo ratings yet
- Major Project Report 7bDocument74 pagesMajor Project Report 7bADDU MRUDHULANo ratings yet
- Group 10Document55 pagesGroup 10Tanuj SharmaNo ratings yet
- Wireless Sensor NetworkDocument85 pagesWireless Sensor NetworkRupam Vaghasiya83% (6)
- Report 04Document53 pagesReport 04mallasujith02No ratings yet
- Implementation of A Child Rescue System From BorewellDocument8 pagesImplementation of A Child Rescue System From BorewellaavulaganeshcseNo ratings yet
- Sree Rama Engineering College: Iot Based Environment Pollution Monitoring SystemDocument32 pagesSree Rama Engineering College: Iot Based Environment Pollution Monitoring SystemPrashun PalNo ratings yet
- MGCP ReportDocument28 pagesMGCP Reportmamidiajaykumar6544No ratings yet
- Telepresence RobotDocument22 pagesTelepresence RobotWØRLD HÖPZNo ratings yet
- Image Captioning Using Deep LearningDocument46 pagesImage Captioning Using Deep LearningSunitha ManamNo ratings yet
- Wireless Senswor NetworkingDocument22 pagesWireless Senswor Networkingmilandixit01No ratings yet
- A Technical Seminar Report ON: Mention The Topic HereDocument27 pagesA Technical Seminar Report ON: Mention The Topic Hereranjith Kumar boorlaNo ratings yet
- Microwave Link Design ECE ELEC05 Camonias Raymundo Cunanan Ibañez Fernandez Marban PDFDocument101 pagesMicrowave Link Design ECE ELEC05 Camonias Raymundo Cunanan Ibañez Fernandez Marban PDFVin VinNo ratings yet
- A&U DM DOC Mini ProDocument49 pagesA&U DM DOC Mini ProPriyaNo ratings yet
- Infrared Wireless HeadphonesDocument25 pagesInfrared Wireless HeadphonesKumar R Ranjan100% (1)
- 3D Mapping of Selected Regions Using NavIC ReceiversDocument12 pages3D Mapping of Selected Regions Using NavIC ReceiversInternational Journal of Innovative Science and Research Technology100% (1)
- JCGHVKL/JBKHJGHHDocument34 pagesJCGHVKL/JBKHJGHHsonu sk100% (1)
- Enhancedsteganographicmethodusing LSBParityandspreadspectrumtechniquefor Audio SignalsDocument82 pagesEnhancedsteganographicmethodusing LSBParityandspreadspectrumtechniquefor Audio SignalsMohammad HamoudeNo ratings yet
- Automatic Garbage Intimator Final ReportDocument28 pagesAutomatic Garbage Intimator Final ReportPola AshutoshNo ratings yet
- Ultrasonic Based Distance Measurement SystemDocument24 pagesUltrasonic Based Distance Measurement Systemyash bahetiNo ratings yet
- Jagath Seminor ReportDocument26 pagesJagath Seminor Reportpraveenkumar smNo ratings yet
- Madhu7 PDFDocument86 pagesMadhu7 PDFSubhanjali MyneniNo ratings yet
- MPR Seminar Report 1Document22 pagesMPR Seminar Report 1abhiramks222No ratings yet
- Deatiled Synopsis (C)Document12 pagesDeatiled Synopsis (C)Stack manNo ratings yet
- Visvesvaraya Technological University: "Photonics"Document16 pagesVisvesvaraya Technological University: "Photonics"Vision DCET0% (1)
- Remote SensingDocument21 pagesRemote SensingMathan KumarNo ratings yet
- Weather ForecastDocument56 pagesWeather ForecastAakash Ńąmðév100% (1)
- Low Power Wireless Sensor Network - DocumentDocument30 pagesLow Power Wireless Sensor Network - Documentvivek gangwar100% (5)
- DCCPDFDocument20 pagesDCCPDFKirti MahajanNo ratings yet
- Documents - Pub - Spectrum Sensing Techniques For Cognitive Radio Sensor Radio Sensor NetworkDocument75 pagesDocuments - Pub - Spectrum Sensing Techniques For Cognitive Radio Sensor Radio Sensor NetworkAla AgrebiNo ratings yet
- Design of Microstrip Log Periodic Antenna For Wireless ApplicationsDocument36 pagesDesign of Microstrip Log Periodic Antenna For Wireless ApplicationsSubhanjali MyneniNo ratings yet
- Automated Railway Announcement Using Zigbee ProtocolDocument18 pagesAutomated Railway Announcement Using Zigbee Protocolsree2728No ratings yet
- Report EV2 2020CN06Document12 pagesReport EV2 2020CN06MM SamarNo ratings yet
- Echolocation and Blind Navigation System: Mini Project ReportDocument29 pagesEcholocation and Blind Navigation System: Mini Project Reportlekshmidevi mNo ratings yet
- Compact Planar Inverted-F Antenna For Microsats Omnidirectional CommunicationsDocument40 pagesCompact Planar Inverted-F Antenna For Microsats Omnidirectional CommunicationsKalyan Reddy AnuguNo ratings yet
- Remote Sensing & Geospatial Technologies Dictionary: Grow Your Vocabulary, #55From EverandRemote Sensing & Geospatial Technologies Dictionary: Grow Your Vocabulary, #55No ratings yet
- Multidimensional Systems: Signal Processing and Modeling Techniques: Advances in Theory and ApplicationsFrom EverandMultidimensional Systems: Signal Processing and Modeling Techniques: Advances in Theory and ApplicationsNo ratings yet
- Linearization and Efficiency Enhancement Techniques for Silicon Power Amplifiers: From RF to mmWFrom EverandLinearization and Efficiency Enhancement Techniques for Silicon Power Amplifiers: From RF to mmWNo ratings yet
- 1 s2.0 S030147971730052X Main PDFDocument14 pages1 s2.0 S030147971730052X Main PDFApp CrackNo ratings yet
- Landsat 8 (L8) LEVEL 1 (L1) Data Format Control Book (DFCB) : Department of The Interior U.S. Geological SurveyDocument32 pagesLandsat 8 (L8) LEVEL 1 (L1) Data Format Control Book (DFCB) : Department of The Interior U.S. Geological SurveyApp CrackNo ratings yet
- Landsat 7 Press KitDocument32 pagesLandsat 7 Press KitBob Andrepont100% (1)
- Remote Sensing 'S Recent and Future Contributions To Landscape EcologyDocument13 pagesRemote Sensing 'S Recent and Future Contributions To Landscape EcologyArturo BlueNo ratings yet
- Practical Handbook For Remote Sensing - Geog 327Document88 pagesPractical Handbook For Remote Sensing - Geog 327Antoinette WiafeNo ratings yet
- Geospatial Analysis of The Impacts of Jibia Dam in Nigeria On Its Surrounding EnvironmentDocument8 pagesGeospatial Analysis of The Impacts of Jibia Dam in Nigeria On Its Surrounding EnvironmentAZOJETE UNIMAIDNo ratings yet
- Exploring The Spatio-Temporal Patterns of Normalised Difference Vegetation Index (NDVI) in Varanasi An Analysis of Vegetation DynamicsDocument6 pagesExploring The Spatio-Temporal Patterns of Normalised Difference Vegetation Index (NDVI) in Varanasi An Analysis of Vegetation DynamicsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- CONESCAPAN 2022 Paper 24741Document6 pagesCONESCAPAN 2022 Paper 24741HICHAM LAHMAIDINo ratings yet
- Mcknights Physical Geography A Landscape Appreciation 11th Edition Hess Test BankDocument49 pagesMcknights Physical Geography A Landscape Appreciation 11th Edition Hess Test BankMarkManntjaid100% (13)
- Extraction of Water-Body Area From High-ResolutionDocument9 pagesExtraction of Water-Body Area From High-ResolutionNiyaz KhanNo ratings yet
- Fundamentals Aquatic WebDocument62 pagesFundamentals Aquatic WebApolinar TabañeraNo ratings yet
- 7134 41183 3 PBDocument18 pages7134 41183 3 PBdavik davikNo ratings yet
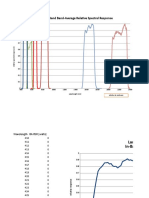
- Landsat 7 In-Band Band-Average Relative Spectral Response: Wavelength (NM)Document39 pagesLandsat 7 In-Band Band-Average Relative Spectral Response: Wavelength (NM)Maxi MoreyNo ratings yet
- USING REMOTE SENSING FOR LINEAMENT EXTRACTION IN Al MAGHRABAH AREADocument6 pagesUSING REMOTE SENSING FOR LINEAMENT EXTRACTION IN Al MAGHRABAH AREAnikolina00iri0No ratings yet
- Spatio-Temporal Analysis of Forest Changes in Contrasting Land Use Regimes of Zanzibar, TanzaniaDocument11 pagesSpatio-Temporal Analysis of Forest Changes in Contrasting Land Use Regimes of Zanzibar, TanzaniaNiccolò UngaroNo ratings yet
- Thesis On Land Use ChangeDocument9 pagesThesis On Land Use Changeelizabethsnyderdesmoines100% (2)
- 2022 Subraeluetal - LandDocument30 pages2022 Subraeluetal - LandAldrian BarbasanNo ratings yet
- Main ProjectDocument15 pagesMain ProjectRajesh KotianNo ratings yet
- Monitoring Water Quality Using Satellite Image ProcessingDocument49 pagesMonitoring Water Quality Using Satellite Image ProcessingτNo ratings yet
- Geo MatrixDocument24 pagesGeo MatrixUlil AzmiNo ratings yet
- Mohammed Aslam, B. Mahalingam PDFDocument7 pagesMohammed Aslam, B. Mahalingam PDFJournal of Global ResourcesNo ratings yet
- 10 Automatic Detection of Forest Disturbance by SatelliteDocument2 pages10 Automatic Detection of Forest Disturbance by SatelliteBăh ŢăraneeNo ratings yet
- On The Verge of Photography Non-Represen PDFDocument306 pagesOn The Verge of Photography Non-Represen PDFbruno_vianna_1No ratings yet
- Aster: User's GuideDocument104 pagesAster: User's GuideLawrence San CristobalNo ratings yet
- Python QGISDocument6 pagesPython QGISMariel NúñezNo ratings yet
- Environmental ChallengesDocument20 pagesEnvironmental ChallengesAbdulla - Al KafyNo ratings yet
- Application of Gis and Remote Sensing in Disaster Management: A Critical Review of Flood ManagementDocument5 pagesApplication of Gis and Remote Sensing in Disaster Management: A Critical Review of Flood ManagementJamhur SudjanaNo ratings yet
- Novianti - 2021 - Klasifikasi Landsat - Palembang Menggunakan Google EarthDocument11 pagesNovianti - 2021 - Klasifikasi Landsat - Palembang Menggunakan Google EarthdlouhenNo ratings yet
- 1 s2.0 S2667010021002055 MainDocument8 pages1 s2.0 S2667010021002055 MainAyatullah KhanNo ratings yet