Download as pdf or txt
You might also like
- Final Exam Formula SheetDocument3 pagesFinal Exam Formula SheetMohab SamehNo ratings yet
- Unit 4 SLO1-6Document36 pagesUnit 4 SLO1-6shashwatNo ratings yet
- LD5 Mano Ch5Document37 pagesLD5 Mano Ch5Amr HefnyNo ratings yet
- DLC Unit 3Document83 pagesDLC Unit 3kkr kkrNo ratings yet
- Flip Flops and Application: Japan Malaysia Technical Institute (Jmti) TKEDocument34 pagesFlip Flops and Application: Japan Malaysia Technical Institute (Jmti) TKEFadly ShafiqNo ratings yet
- Synchronous Sequential Ckts by Lakshmi NarayanaDocument30 pagesSynchronous Sequential Ckts by Lakshmi NarayanaMurali Krishna100% (1)
- Lecture 03Document30 pagesLecture 03Sadi RifatNo ratings yet
- Lecture 1Document35 pagesLecture 1زياد عبدالله عبدالحميدNo ratings yet
- Chapter 4 - Sequential Circuits: Logic and Computer Design FundamentalsDocument21 pagesChapter 4 - Sequential Circuits: Logic and Computer Design Fundamentalsmahbub mitulNo ratings yet
- Chapter #6: Sequential Logic DesignDocument48 pagesChapter #6: Sequential Logic DesignmasteroffateNo ratings yet
- Class10 31 05 2018Document22 pagesClass10 31 05 2018Mohamed El FellahiNo ratings yet
- Cs8351 Digital Principles and System Design: Unit Iii Synchronous Sequential LogicDocument185 pagesCs8351 Digital Principles and System Design: Unit Iii Synchronous Sequential LogicsundariNo ratings yet
- Sequential Logic: Unit-IDocument86 pagesSequential Logic: Unit-IMonika RawatNo ratings yet
- Digital Electronics Unit VDocument36 pagesDigital Electronics Unit VtalkwithgamersNo ratings yet
- Lecture 8 - Sequantial Logic Circuits - 2014Document32 pagesLecture 8 - Sequantial Logic Circuits - 2014DineshNo ratings yet
- Module 4 - Seq Circuits 1Document55 pagesModule 4 - Seq Circuits 1Nithish KannaaNo ratings yet
- Module 2 - Sequential CircuitsDocument10 pagesModule 2 - Sequential Circuitsshreeshailshivappapadadali2004No ratings yet
- Combinational and SequentialCircuitsDocument40 pagesCombinational and SequentialCircuitsbrieabrhaNo ratings yet
- 02 01 Latch & Flip FlopDocument77 pages02 01 Latch & Flip FlopBINJADNo ratings yet
- Chapter 6 - Sequential Logics (EEEg4302) 2Document31 pagesChapter 6 - Sequential Logics (EEEg4302) 2Toli fiqeeNo ratings yet
- Unit 4Document20 pagesUnit 4SongYak YamNo ratings yet
- Chapter Objectives:: Ee 120 Lecture Notes Chapte R 5: Sequential Logic Circuits 5.1Document13 pagesChapter Objectives:: Ee 120 Lecture Notes Chapte R 5: Sequential Logic Circuits 5.1Christian MoyaNo ratings yet
- DF GTU Study Material Presentations Unit-3Document54 pagesDF GTU Study Material Presentations Unit-3bhavanitelecom123No ratings yet
- DPSD 20-21 Notes Unit-3Document138 pagesDPSD 20-21 Notes Unit-3Karthick Sivakumar ChellamuthuNo ratings yet
- Unit 3 VLSIDocument93 pagesUnit 3 VLSIPraba KaranNo ratings yet
- Circuit Configuration of ALU (Combination Circuit) : FE Vol.1 - ChapterDocument40 pagesCircuit Configuration of ALU (Combination Circuit) : FE Vol.1 - ChapterSu LeiNo ratings yet
- Chapter 5 Sequential CircuitsDocument60 pagesChapter 5 Sequential CircuitsfireworkNo ratings yet
- DE NotesDocument101 pagesDE NotesJane HopperNo ratings yet
- Flip FlopsDocument39 pagesFlip FlopsPradeep KuruvattiNo ratings yet
- EE-221 Chap07 Part-01Document42 pagesEE-221 Chap07 Part-01AliNo ratings yet
- Lesson1 Synchronous Sequential CircuitsDocument15 pagesLesson1 Synchronous Sequential CircuitsChristopher EduardNo ratings yet
- Module2 - FF - ADE - 21EEE135 - AK - LEDocument14 pagesModule2 - FF - ADE - 21EEE135 - AK - LEadithidhatri1219No ratings yet
- 7 & 8. Sequential CircuitsDocument24 pages7 & 8. Sequential CircuitsDr. Sanjeev PuniaNo ratings yet
- 1 Unit 2 Flip FlopsDocument23 pages1 Unit 2 Flip FlopsShivangi SharmaNo ratings yet
- ACTIVITY PPT Exploring Sequential CircuitsDocument12 pagesACTIVITY PPT Exploring Sequential Circuitsks78874960% (1)
- Sequential Logic Circuits: Digital ElectronicsDocument44 pagesSequential Logic Circuits: Digital ElectronicsELIZABETHNo ratings yet
- FALLSEM2021-22 SWE1003 ETH VL2021220100826 Reference Material I 27-08-2021 Seq-Ckt2Document108 pagesFALLSEM2021-22 SWE1003 ETH VL2021220100826 Reference Material I 27-08-2021 Seq-Ckt2Dhanwanth JPNo ratings yet
- Lec 11 Sequential Logic Circuits-1Document22 pagesLec 11 Sequential Logic Circuits-1Pavamana GiribhattanavarNo ratings yet
- Topic 6a Oscillators PDFDocument26 pagesTopic 6a Oscillators PDFAbdulrahman NasserNo ratings yet
- Digital Electronics: CT 304N Unit-4 (Part:1) Flip Flops & Sequential Logic and CircuitsDocument39 pagesDigital Electronics: CT 304N Unit-4 (Part:1) Flip Flops & Sequential Logic and CircuitsLiyanshu patelNo ratings yet
- Lecture 17 LatchesDocument14 pagesLecture 17 LatchesClement KooNo ratings yet
- 4 Sequential CircuitDocument24 pages4 Sequential CircuitAKASH PALNo ratings yet
- Analog Digital Electronics (ADE) - Sequential CircuitsDocument33 pagesAnalog Digital Electronics (ADE) - Sequential CircuitsCheekuri DineshNo ratings yet
- What Are The Different Types of Sequential CircuitsDocument10 pagesWhat Are The Different Types of Sequential Circuitsalvin castroNo ratings yet
- Digital Logic Design: Dr. Fenghui YaoDocument48 pagesDigital Logic Design: Dr. Fenghui YaomatadorNo ratings yet
- Flip-Flops: Revision of Lecture Notes Written by Dr. Timothy DrysdaleDocument35 pagesFlip-Flops: Revision of Lecture Notes Written by Dr. Timothy DrysdaleKaustav MitraNo ratings yet
- Unit 6 Introduction To Sequential LogicDocument34 pagesUnit 6 Introduction To Sequential LogicTech Talk With MR. SNo ratings yet
- EC381 Lecture15 PDFDocument23 pagesEC381 Lecture15 PDFCorazon corazonNo ratings yet
- Chapter 5Document109 pagesChapter 5Amera AdilNo ratings yet
- Introduction To Sequential Circuits: by Dr. Irshad Ahmad AnsariDocument77 pagesIntroduction To Sequential Circuits: by Dr. Irshad Ahmad AnsariPrajith ReddyNo ratings yet
- Chapter 3 Sequential Logic and CircuitsDocument70 pagesChapter 3 Sequential Logic and CircuitsCharul DeshpandeNo ratings yet
- 8 Sequential LogicDocument76 pages8 Sequential LogicTin TranNo ratings yet
- 5.registers and CountersDocument28 pages5.registers and Countersyonas nasNo ratings yet
- CS 3351 Digital Principles and Computer OrganizationDocument61 pagesCS 3351 Digital Principles and Computer OrganizationDr.Kalaivazhi100% (2)
- Introduction To Sequential Circuits: by Dr. Irshad Ahmad AnsariDocument60 pagesIntroduction To Sequential Circuits: by Dr. Irshad Ahmad AnsariShubham KhandelwalNo ratings yet
- Latches N FFsDocument24 pagesLatches N FFsAmoga LekshmiNo ratings yet
- Flip-Flops, Triggering, Master Slave ConfigurationDocument21 pagesFlip-Flops, Triggering, Master Slave ConfigurationgayathriNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- ChamSys Product CatalogueDocument28 pagesChamSys Product CatalogueChamSys|net100% (1)
- Understanding FTTH Architecture v5Document25 pagesUnderstanding FTTH Architecture v5laoaaNo ratings yet
- Finevu Pro ManualDocument36 pagesFinevu Pro ManualAngelevNo ratings yet
- CP1E Manual BookDocument9 pagesCP1E Manual BookYuda Muhammad HamdaniNo ratings yet
- Apxvbll15x C I20 PDFDocument7 pagesApxvbll15x C I20 PDFDouglas CrespoNo ratings yet
- Software Hardware Tech x86 VirtDocument9 pagesSoftware Hardware Tech x86 VirtwyfwongNo ratings yet
- Indoor Omnidirectional Antenna 800-2500 MHZ: Product Data Sheet I-Ato2-800/2500Document2 pagesIndoor Omnidirectional Antenna 800-2500 MHZ: Product Data Sheet I-Ato2-800/2500Yns KlcNo ratings yet
- Omniaccess 207 Series AP DatasheetDocument5 pagesOmniaccess 207 Series AP DatasheetSainiRahulNo ratings yet
- Hybrid EDFA/SOA Amplifier Design For CWDM Network: January 2016Document6 pagesHybrid EDFA/SOA Amplifier Design For CWDM Network: January 2016samiaNo ratings yet
- 5 Generation 1 2-1Document12 pages5 Generation 1 2-1Khushi BhayanNo ratings yet
- A High Efficiency Flyback Micro-Inverter With A New Adaptive Snubber For Photovoltaic ApplicationsDocument29 pagesA High Efficiency Flyback Micro-Inverter With A New Adaptive Snubber For Photovoltaic ApplicationsChristian EmenikeNo ratings yet
- JBL Hdi Series: Premium Home Loudspeaker SystemsDocument13 pagesJBL Hdi Series: Premium Home Loudspeaker SystemsEnrique RangelNo ratings yet
- Knowledge QuestionsDocument16 pagesKnowledge QuestionsWeekly Dose of Aviation0% (1)
- Lecture 7: Extrinsic Semiconductors - Fermi LevelDocument10 pagesLecture 7: Extrinsic Semiconductors - Fermi LevelAubal ShaubalNo ratings yet
- Ret620 Ansi BRDocument4 pagesRet620 Ansi BRFernando TamayoNo ratings yet
- HP Laserjet 9050 Output TraysDocument2 pagesHP Laserjet 9050 Output Traysmalikanjum718435No ratings yet
- Electrical Engineering Technology Department Ms. Jen AndadorDocument13 pagesElectrical Engineering Technology Department Ms. Jen Andadorpeter vanderNo ratings yet
- v2 Led LCD Screen Panel RepairDocument199 pagesv2 Led LCD Screen Panel RepairCaufriezLaurent75% (4)
- Proteus VSMDocument2 pagesProteus VSMbouje72No ratings yet
- Poynting PATCH-26Document6 pagesPoynting PATCH-26Carlos CostaNo ratings yet
- The Grid Tie Solar Panel SystemDocument3 pagesThe Grid Tie Solar Panel SystemphilnavfacNo ratings yet
- Module 1 Backbencher - ClubDocument23 pagesModule 1 Backbencher - Clubsamanth0404No ratings yet
- CPUs MR - HakarDocument7 pagesCPUs MR - HakarMuhamad MahrwfNo ratings yet
- A673 Hitachi SemiconductorDocument6 pagesA673 Hitachi SemiconductortecjadirNo ratings yet
- Wireless Mobile Charger PDFDocument3 pagesWireless Mobile Charger PDFChristian LunaNo ratings yet
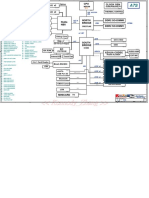
- A7SDocument105 pagesA7SFlavianoSilvaNo ratings yet
- Experiment 01-Cse310Document7 pagesExperiment 01-Cse310jk palashNo ratings yet
- DatasheetDocument2 pagesDatasheetSebastian ChaileNo ratings yet
- BVW 400 BrocDocument20 pagesBVW 400 Brocmaxx001No ratings yet