Download as pdf or txt
You might also like
- KPI Dictionary Vol1 PreviewDocument12 pagesKPI Dictionary Vol1 PreviewJahja Aja64% (11)
- ABES IDC Estudo Mercado Brasileirode Software 2023 v02 PreviaDocument55 pagesABES IDC Estudo Mercado Brasileirode Software 2023 v02 PreviaDaniel SiesesNo ratings yet
- Gorean Adventures 01 The Tower of ArtDocument36 pagesGorean Adventures 01 The Tower of ArtMahyná Cristina0% (2)
- VLFSDocument52 pagesVLFSGuille8No ratings yet
- Employment at Will - A Legal PerspectiveDocument7 pagesEmployment at Will - A Legal Perspectivesuck my cuntNo ratings yet
- Mooring PublicationDocument11 pagesMooring PublicationNinad Anil Bhaskarwar oe21m012No ratings yet
- Estimation of The Hydrodynamics Coefficients of AnDocument7 pagesEstimation of The Hydrodynamics Coefficients of AnmohamedNo ratings yet
- Recent Developments in Remote Inspections of Ship StructuresDocument11 pagesRecent Developments in Remote Inspections of Ship StructuresSakib RafeeNo ratings yet
- 2014-03-23 Chapter - ID 24326 7x10Document33 pages2014-03-23 Chapter - ID 24326 7x10Suman SahaNo ratings yet
- Design of A Mooring System For An Offshore Structure: A Case Study of 5000 Tonnes Offshore Work Barge (WB)Document11 pagesDesign of A Mooring System For An Offshore Structure: A Case Study of 5000 Tonnes Offshore Work Barge (WB)leokareyxoxoersNo ratings yet
- Jmse 11 02172Document27 pagesJmse 11 02172MjNo ratings yet
- Vu SensorDocument28 pagesVu SensorElfer MachacaNo ratings yet
- Design and Development of An Autonomous UnderwaterDocument6 pagesDesign and Development of An Autonomous UnderwaterKrishna TejaNo ratings yet
- Autonomous Nautical NavigationDocument22 pagesAutonomous Nautical NavigationHüseyinNo ratings yet
- Design and Development of An Autonomous UnderwaterDocument6 pagesDesign and Development of An Autonomous UnderwaterayyappadasNo ratings yet
- Cooperative Control System of The Floating Cranes For The Dual LiftingDocument8 pagesCooperative Control System of The Floating Cranes For The Dual LiftingSebastian Velásquez MoralesNo ratings yet
- USV Review PDFDocument26 pagesUSV Review PDFderiNo ratings yet
- High-Speed Obstacle Avoidance of A Large-Scale Underactuated Autonomous Underwater Vehicle Under A Finite Field of ViewDocument10 pagesHigh-Speed Obstacle Avoidance of A Large-Scale Underactuated Autonomous Underwater Vehicle Under A Finite Field of Viewq.sun.cseNo ratings yet
- Autonomous Ships Concept and Mathematical Models Application in Their Steering Process ControlDocument7 pagesAutonomous Ships Concept and Mathematical Models Application in Their Steering Process ControlAlex SupcgoNo ratings yet
- Human Factor Issues in Remote Ship Operations: Lesson Learned by Studying Different DomainsDocument20 pagesHuman Factor Issues in Remote Ship Operations: Lesson Learned by Studying Different Domainsatif jamalNo ratings yet
- Oemt 2006 Global Networking For Development of Ship Handling SimulatorsDocument8 pagesOemt 2006 Global Networking For Development of Ship Handling Simulatorsapi-3814100No ratings yet
- SmartShips2016 YRpaperRINA FINALDocument11 pagesSmartShips2016 YRpaperRINA FINALNaveed AhmedNo ratings yet
- On The Reliability of The Autosub Autonomous UnderDocument27 pagesOn The Reliability of The Autosub Autonomous Underjaiprakash nainNo ratings yet
- Advances in Unmanned Underwater Vehicles TechnologDocument15 pagesAdvances in Unmanned Underwater Vehicles TechnologBurak PalaNo ratings yet
- Study On Control System of Integrated Unmanned Surface Vehicle and Underwater VehicleDocument23 pagesStudy On Control System of Integrated Unmanned Surface Vehicle and Underwater VehicleDong HoangNo ratings yet
- Applsci 11 03569 v2Document19 pagesApplsci 11 03569 v2Završni radNo ratings yet
- Omae2015 41020 2Document8 pagesOmae2015 41020 2Arun Kumar PancharajNo ratings yet
- Speed and Heading Control-Based Collision Avoidance For A Ship Towing SystemDocument14 pagesSpeed and Heading Control-Based Collision Avoidance For A Ship Towing SystemAhmad luthfi asrorNo ratings yet
- TRAPRO Lazakisfinal PDFDocument11 pagesTRAPRO Lazakisfinal PDFJOSEPH ALEXANDER PEÑA IZQUIERDONo ratings yet
- Basic Structural - Health - Monitoring - For - Future - Space - VehicleDocument11 pagesBasic Structural - Health - Monitoring - For - Future - Space - Vehicleenquiry infoNo ratings yet
- Research On Autonomous Collision Avoidance of Merchant Ship Based On Inverse Reinforcement LearningDocument15 pagesResearch On Autonomous Collision Avoidance of Merchant Ship Based On Inverse Reinforcement LearningJuan Luis ValleNo ratings yet
- Passenger Ship Evacuation Simulation and Validation by E - 2014 - Procedia EnginDocument6 pagesPassenger Ship Evacuation Simulation and Validation by E - 2014 - Procedia EnginjanainaNo ratings yet
- Jmse 07 00438 v3Document32 pagesJmse 07 00438 v3Alfonso RamosNo ratings yet
- Modeling of Soft Fluidic Actuators Using Fluid-Structure Interaction Simulations With Underwater ApplicationsDocument12 pagesModeling of Soft Fluidic Actuators Using Fluid-Structure Interaction Simulations With Underwater Applicationsgus.sukkasigNo ratings yet
- Condition Monitoring For Enhanced Inspection, Maintenance and Decision Making in Ship OperationsDocument8 pagesCondition Monitoring For Enhanced Inspection, Maintenance and Decision Making in Ship Operationsadenorla1No ratings yet
- Designing A Ship Autopilot System For Operation inDocument25 pagesDesigning A Ship Autopilot System For Operation inrobert.fundeanuNo ratings yet
- Autonomous Underwater Vehicles Recent deDocument8 pagesAutonomous Underwater Vehicles Recent demata mareNo ratings yet
- Shopera Eedi RinaDocument15 pagesShopera Eedi RinagodfreyreggioNo ratings yet
- Loads For Use in The Design of Ships and Offshore StructuresDocument45 pagesLoads For Use in The Design of Ships and Offshore StructuresAnonymous JsAdg5No ratings yet
- Simulation of Intelligent Ship Autopilots: KeywordsDocument7 pagesSimulation of Intelligent Ship Autopilots: KeywordsnikhilNo ratings yet
- Drones: Optimization Methods Applied To Motion Planning of Unmanned Aerial Vehicles: A ReviewDocument22 pagesDrones: Optimization Methods Applied To Motion Planning of Unmanned Aerial Vehicles: A ReviewvanhaimtaNo ratings yet
- An Energy Efficient Hierarchical Algorithm - 2023 - International Journal of NaDocument14 pagesAn Energy Efficient Hierarchical Algorithm - 2023 - International Journal of NaAdriana PodariuNo ratings yet
- Jacket InplaceDocument25 pagesJacket Inplacerfvz6s100% (2)
- Dynamic Failure Analysisof Ship Energy SystemsDocument11 pagesDynamic Failure Analysisof Ship Energy SystemsDAN CHAMZNo ratings yet
- 1 s2.0 S0141118721002996 Main PDFDocument11 pages1 s2.0 S0141118721002996 Main PDFDävîd MõnrōyNo ratings yet
- Documento 1.-Development of An Unmanned Maritime System Reference ArchitectureDocument12 pagesDocumento 1.-Development of An Unmanned Maritime System Reference Architecturechoque790No ratings yet
- Naval Artificial Intelligence: June 2017Document8 pagesNaval Artificial Intelligence: June 2017Lavinia MaxineanuNo ratings yet
- TCST Yang LiuDocument9 pagesTCST Yang LiuNurcan AltınbaşNo ratings yet
- 10 1016@j Ssci 2020 104838Document12 pages10 1016@j Ssci 2020 10483821-016-Abdul Aziiz Reza TamaNo ratings yet
- Edas Final-1570046541Document3 pagesEdas Final-1570046541lissa.gourillonNo ratings yet
- Advances in Line-of-Sight Guidance For Path Following of Autonomous Marine Vehicles - An OverviewDocument17 pagesAdvances in Line-of-Sight Guidance For Path Following of Autonomous Marine Vehicles - An OverviewÁlvaro NegreirosNo ratings yet
- Icuas2016 SaaDocument11 pagesIcuas2016 Saalejmi.rania2000No ratings yet
- A Review On Unmanned Surface Vehicles DevelopmentDocument8 pagesA Review On Unmanned Surface Vehicles Developmentwwt1135172086No ratings yet
- (Detectron2) Application of Convolutional Neural Network (CNN) To Recognize Ship StructuresDocument16 pages(Detectron2) Application of Convolutional Neural Network (CNN) To Recognize Ship Structuresbryansantoso8585No ratings yet
- Jmse 10 00760Document11 pagesJmse 10 00760abbasNo ratings yet
- Multi-Tiered Sensing and Data Processing For Monitoring Ship StructuresDocument20 pagesMulti-Tiered Sensing and Data Processing For Monitoring Ship StructuresJanatan ChoiNo ratings yet
- Jurnal 41Document12 pagesJurnal 41fikri aryantoNo ratings yet
- Development of Usv Autonomy: Architecture, Implementation and Sea TrialsDocument19 pagesDevelopment of Usv Autonomy: Architecture, Implementation and Sea TrialsMara Rebeka HerzogNo ratings yet
- Reliability Analysisofan Autonomous Underwater Vehicle Using Fault TreeDocument7 pagesReliability Analysisofan Autonomous Underwater Vehicle Using Fault Treejaiprakash nainNo ratings yet
- Uncrewed Autonomous Marine Vessels Test The Limits of Maritime Safety FrameworksDocument28 pagesUncrewed Autonomous Marine Vessels Test The Limits of Maritime Safety FrameworksDilshan VimukthiNo ratings yet
- Jurnal 16Document13 pagesJurnal 16fikri aryantoNo ratings yet
- The State of Art of Autonomous Underwater Vehicles in Current and Future DecadesDocument6 pagesThe State of Art of Autonomous Underwater Vehicles in Current and Future DecadesGabrielZamanNo ratings yet
- THE AUTONOMOUS WAVE. THE RISE AND IMPACT OF AUTONOMOUS SHIPS AND AUTONOMOUS SHIP MANAGEMENT COMPANIESFrom EverandTHE AUTONOMOUS WAVE. THE RISE AND IMPACT OF AUTONOMOUS SHIPS AND AUTONOMOUS SHIP MANAGEMENT COMPANIESNo ratings yet
- Application of Probabilistic Methods for the Safety Assessment and the Reliable Operation of Research ReactorsFrom EverandApplication of Probabilistic Methods for the Safety Assessment and the Reliable Operation of Research ReactorsNo ratings yet
- E-Tivity 4 Research Question Proposed in E-Tivity-1Document2 pagesE-Tivity 4 Research Question Proposed in E-Tivity-1shanNo ratings yet
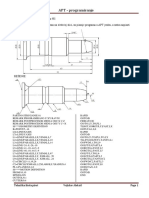
- APT - Strug 01-02-03Document3 pagesAPT - Strug 01-02-03Vojislav AleksicNo ratings yet
- Crochet Love Financial PlanDocument2 pagesCrochet Love Financial PlanJaztine CaoileNo ratings yet
- ATOM V-808: Cleaning InstructionsDocument10 pagesATOM V-808: Cleaning Instructionsjerson_rojas19899571No ratings yet
- 7steps For Organizing Restaurant and Kitchen CleaningDocument2 pages7steps For Organizing Restaurant and Kitchen CleaningAlpha HospitalityNo ratings yet
- 8b. Hibbeler - 8th - Double Integration TheoryDocument9 pages8b. Hibbeler - 8th - Double Integration TheoryMuhammad KaisarNo ratings yet
- FP75E eDocument4 pagesFP75E estar990No ratings yet
- UPSE Discussion Paper On Maharlika FundDocument28 pagesUPSE Discussion Paper On Maharlika FundjosnixNo ratings yet
- Affiliated To University of MumbaiDocument98 pagesAffiliated To University of MumbaiAnand YadavNo ratings yet
- NHS Lothian A& EDocument2 pagesNHS Lothian A& EKezia Dugdale MSPNo ratings yet
- Wi Vi TchnologyDocument29 pagesWi Vi TchnologyRajpranabh100% (1)
- WM 07Document124 pagesWM 07chrideerNo ratings yet
- Revised 2021 Magna Carta For Ho & HoaDocument416 pagesRevised 2021 Magna Carta For Ho & HoaLiezl Tizon Columnas100% (5)
- Lion Air Eticket Itinerary / ReceiptDocument2 pagesLion Air Eticket Itinerary / ReceiptKokoh RayNo ratings yet
- Case Study TipsDocument4 pagesCase Study TipsUjjawal PandeyNo ratings yet
- CP TD1Document1 pageCP TD1Ahsan IqbalNo ratings yet
- Vinayaka COLONYDocument1 pageVinayaka COLONY2451-18-737-020 NANNAPURAJU KARTHIKEYANo ratings yet
- Plastic Deformation of Al and AA5754 Between 4.2K and 295KDocument15 pagesPlastic Deformation of Al and AA5754 Between 4.2K and 295Kenver328No ratings yet
- Service Lifecycle ManagementDocument18 pagesService Lifecycle Managementshanmuganathan350No ratings yet
- Understanding What A CDP DoesDocument5 pagesUnderstanding What A CDP DoesVISHAL GUPTANo ratings yet
- Id Fresh Food: Scripting A Fresh StoryDocument14 pagesId Fresh Food: Scripting A Fresh StorydevrishabhNo ratings yet
- GenDocument46 pagesGenChowdhury SujayNo ratings yet
- Forming Technologies IncDocument18 pagesForming Technologies InctuấnNo ratings yet
- ASTM C627 Robinson TestDocument4 pagesASTM C627 Robinson TestSiu Hei LauNo ratings yet
- Module 2 NotesDocument10 pagesModule 2 NotesSanthosh Y MNo ratings yet
- The Effect of Social Media Influencer On Brand Image, Self-Concept, and Purchase IntentionDocument14 pagesThe Effect of Social Media Influencer On Brand Image, Self-Concept, and Purchase IntentionLiza NoraNo ratings yet