Download as pdf or txt
You might also like
- ELEC3240 Laboratories 2011Document18 pagesELEC3240 Laboratories 2011Michael AwaNo ratings yet
- Preparing To Define The Topology of A CICSplexDocument4 pagesPreparing To Define The Topology of A CICSplexgatrivedNo ratings yet
- Slua 923Document10 pagesSlua 923david reyesNo ratings yet
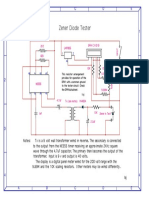
- Zener Diode Tester: A B C D EDocument1 pageZener Diode Tester: A B C D EvalidaeNo ratings yet
- Internal Guide: R.Valarmathi M.E., Lecturer, Department of EEE, DsecDocument26 pagesInternal Guide: R.Valarmathi M.E., Lecturer, Department of EEE, Dsecsetsindia3735No ratings yet
- A High-Power DC-DC Converter Topology For Battery Charging ApplicationsDocument18 pagesA High-Power DC-DC Converter Topology For Battery Charging ApplicationsL CHNo ratings yet
- Design of Forward Converter With Energy Regenerative SnubberDocument30 pagesDesign of Forward Converter With Energy Regenerative SnubberMityaNo ratings yet
- Lightning Example: ECE 524 Transients in Power Systems Session 43 Page 1/22 Spring 2018Document22 pagesLightning Example: ECE 524 Transients in Power Systems Session 43 Page 1/22 Spring 2018FatihNo ratings yet
- Experimental Verification of Direct Dead-Time Control and DC-link Neutral-Point Balancing of A Three Level Neutral-Point-Clamped (3L-NPC) VSCDocument5 pagesExperimental Verification of Direct Dead-Time Control and DC-link Neutral-Point Balancing of A Three Level Neutral-Point-Clamped (3L-NPC) VSCEdsonNo ratings yet
- Power Eectronics Lab Manual#06Document8 pagesPower Eectronics Lab Manual#06Muhammad Salman ShahidNo ratings yet
- Mitigation and Analysis of Very Fast Transient Over Voltages (Vftos) in 765/245Kv Gas Insulated Substation (Gis) by Wavelet TransformsDocument11 pagesMitigation and Analysis of Very Fast Transient Over Voltages (Vftos) in 765/245Kv Gas Insulated Substation (Gis) by Wavelet Transformskumail Al-FashkhiNo ratings yet
- Homework Assignment #4 Transformer Design: L D I (T) D Q D Q I IDocument2 pagesHomework Assignment #4 Transformer Design: L D I (T) D Q D Q I Iuzair amin0% (1)
- Ring OscillatorDocument13 pagesRing OscillatorAnonymous eWMnRr70qNo ratings yet
- Installation Steps:: Pow-CcDocument2 pagesInstallation Steps:: Pow-CcSilviaNo ratings yet
- UntitledDocument32 pagesUntitledSanthosh KumarNo ratings yet
- Major Test-2 (Mt-2) : Hints & SolutionsDocument12 pagesMajor Test-2 (Mt-2) : Hints & SolutionsRadhika PandeyNo ratings yet
- Elec SpectrosDocument17 pagesElec SpectrosAlinaNo ratings yet
- Iwomi ElectDocument5 pagesIwomi ElectP1nice48No ratings yet
- High Chopper Frequency Drive of Wound Rotor Induction Motor With A Resistively Loaded Rotor ChopperDocument5 pagesHigh Chopper Frequency Drive of Wound Rotor Induction Motor With A Resistively Loaded Rotor ChopperchandanjuenggNo ratings yet
- Abb, Sweden AbbincDocument20 pagesAbb, Sweden AbbincMuhammad Asghar KhanNo ratings yet
- Biema bf600 SCHDocument1 pageBiema bf600 SCHokan uysalNo ratings yet
- Expt7 Grp2Document8 pagesExpt7 Grp2Cassie CutieNo ratings yet
- S C T 0 1 3 G - D: Ф16Mmaperture Split Core Current TransformerDocument5 pagesS C T 0 1 3 G - D: Ф16Mmaperture Split Core Current TransformerLa Juan RaulNo ratings yet
- SCH Coll COM20ISV 02 IngleseDocument4 pagesSCH Coll COM20ISV 02 IngleseamirhosseinNo ratings yet
- IES Conv.-1Document11 pagesIES Conv.-1PawanKumar BarnwalNo ratings yet
- Cleveland State University: Department of Electrical and Computer EngineeringDocument5 pagesCleveland State University: Department of Electrical and Computer EngineeringAbhishek SaliyaNo ratings yet
- Opamptester Elcplanet - Com - 1Document2 pagesOpamptester Elcplanet - Com - 1and roidNo ratings yet
- Pulsed Magnetic Field TherapyCircuit PDFDocument4 pagesPulsed Magnetic Field TherapyCircuit PDFHowTo HackNo ratings yet
- Sec: SR MPC Out Going Grand Test - 33 Time: 3 Hrs Max. Marks: 300Document27 pagesSec: SR MPC Out Going Grand Test - 33 Time: 3 Hrs Max. Marks: 300sarthaksingh20122No ratings yet
- Muhammad Zulshimal 09DKM20F2036 Et Practical 3Document7 pagesMuhammad Zulshimal 09DKM20F2036 Et Practical 3Dasir Baluan AsiriNo ratings yet
- CedricDocument11 pagesCedricenhle100% (1)
- Lab 5 Power e (Akmal, Intan, Idzham)Document18 pagesLab 5 Power e (Akmal, Intan, Idzham)AkmalNo ratings yet
- Solutions Manual To Accompany Industrial Electronics 9780132064187Document9 pagesSolutions Manual To Accompany Industrial Electronics 9780132064187MichelleHarringtongxqyNo ratings yet
- Prototype Design-Lks-KeyDocument8 pagesPrototype Design-Lks-KeyManap 21No ratings yet
- SEMIKRON Application-Note How To Read 3L Datasheets en 2015-12-03 Rev-00Document15 pagesSEMIKRON Application-Note How To Read 3L Datasheets en 2015-12-03 Rev-00KamilNo ratings yet
- Comparing Primary and Secondary Ohms and Converting To Per Unit On Secondary When CTR and VTR Don't Cancel-L4Document3 pagesComparing Primary and Secondary Ohms and Converting To Per Unit On Secondary When CTR and VTR Don't Cancel-L4Ahmed RabaaNo ratings yet
- Isolated DC-DC ConverterDocument4 pagesIsolated DC-DC ConverterUge AjjaNo ratings yet
- 2020eir211s02 Memo Semester Test 2 MemoDocument8 pages2020eir211s02 Memo Semester Test 2 MemoMarco VisserNo ratings yet
- Full Download Solutions Manual To Accompany Industrial Electronics 9780132064187 PDFDocument31 pagesFull Download Solutions Manual To Accompany Industrial Electronics 9780132064187 PDFdonna.duke560100% (20)
- EE435-Electric Drives Answer All Questions: Question 1 (10 Marks)Document9 pagesEE435-Electric Drives Answer All Questions: Question 1 (10 Marks)mdthNo ratings yet
- Calculation of Turn-Off Power Losses Generated by An Ultrafast DiodeDocument20 pagesCalculation of Turn-Off Power Losses Generated by An Ultrafast DiodeWesley de PaulaNo ratings yet
- Diagnosis by Parameter Estimation of Stator and Rotor Faults Occuring in Induction MachinesDocument9 pagesDiagnosis by Parameter Estimation of Stator and Rotor Faults Occuring in Induction MachinesStephano Saucedo ReyesNo ratings yet
- Selection of SCRs For Parallel Operation An5369Document3 pagesSelection of SCRs For Parallel Operation An5369Eum MavNo ratings yet
- Industrial ElectronicsDocument7 pagesIndustrial ElectronicsKarl Vincent BebingNo ratings yet
- 1 IECON-2020 Analytical Loss Equations For Three Level Active Neutral Point Clamped ConvertersDocument6 pages1 IECON-2020 Analytical Loss Equations For Three Level Active Neutral Point Clamped Convertersraghbendrat3884No ratings yet
- Exp 3Document14 pagesExp 3Ali MhadatNo ratings yet
- Gate Driver For N-Channel Mosfet: Experiment 6Document34 pagesGate Driver For N-Channel Mosfet: Experiment 6Noona MigleiNo ratings yet
- Agn 2019Document4 pagesAgn 2019lidiNo ratings yet
- LED StrobeDocument1 pageLED Strobekidal permonoNo ratings yet
- Exam1 2014 Final SolutionDocument12 pagesExam1 2014 Final SolutionMohd Helmy Hakimie RozlanNo ratings yet
- Kreatryx PEDocument55 pagesKreatryx PEChiranjib MukherjeeNo ratings yet
- Przetwornica Na SG3524.pl - enDocument5 pagesPrzetwornica Na SG3524.pl - enAmir EsmaeeliNo ratings yet
- Report - CT FinalDocument12 pagesReport - CT FinalArup DasNo ratings yet
- CH 10: Mechanical Springs: Stresses in Helical SpringsDocument8 pagesCH 10: Mechanical Springs: Stresses in Helical SpringsFranklyn kipkuruiNo ratings yet
- An Isolated Interleaved Active-Clamp ZVT Flyback-Boost Converter With Coupled InductorsDocument9 pagesAn Isolated Interleaved Active-Clamp ZVT Flyback-Boost Converter With Coupled InductorsTuấn Anh PhạmNo ratings yet
- Prist University: Question BankDocument7 pagesPrist University: Question Bankrevathimurugesan81No ratings yet
- Three Bit Phase Shifter: MMIC Project Final Report EE525.787 Fall 2007Document16 pagesThree Bit Phase Shifter: MMIC Project Final Report EE525.787 Fall 2007eesharifNo ratings yet
- A Low Investment Single-Phase To Three-Phase Converter Operating With Reduced LossesDocument6 pagesA Low Investment Single-Phase To Three-Phase Converter Operating With Reduced LossesSelamat Meliala, S.T.,MT Selamat Meliala, S.T.,MTNo ratings yet
- Room Temperature Sensitive FanDocument17 pagesRoom Temperature Sensitive FanAictDurgapurNo ratings yet
- Transistor Electronics: Use of Semiconductor Components in Switching OperationsFrom EverandTransistor Electronics: Use of Semiconductor Components in Switching OperationsRating: 1 out of 5 stars1/5 (1)
- Advances in Electrical Machine Power EleDocument14 pagesAdvances in Electrical Machine Power EleThe ThinkerNo ratings yet
- DC To AC 3 PhasaDocument16 pagesDC To AC 3 PhasaThe ThinkerNo ratings yet
- DC To AC 1 PhasaDocument19 pagesDC To AC 1 PhasaThe ThinkerNo ratings yet
- Electrical Loads in Ac SystemDocument12 pagesElectrical Loads in Ac SystemThe ThinkerNo ratings yet
- Transient Characteristics of Electrical Loads With DC SourceDocument7 pagesTransient Characteristics of Electrical Loads With DC SourceThe ThinkerNo ratings yet
- Direct Logic 405Document59 pagesDirect Logic 405Mateus MendesNo ratings yet
- FANUC Series 16-18-MBTBMCTC FANUC Series 16i18i-MATA Improvement of External WorkpieceDocument4 pagesFANUC Series 16-18-MBTBMCTC FANUC Series 16i18i-MATA Improvement of External Workpiecemahdi elmayNo ratings yet
- Build Better Gantt Charts With Teamgantt For Free!: First Sample ProjectDocument10 pagesBuild Better Gantt Charts With Teamgantt For Free!: First Sample ProjectMoujahed AliNo ratings yet
- Reactive Streams PDFDocument4 pagesReactive Streams PDFJose Miguel Romero SevillaNo ratings yet
- Control SystemsDocument161 pagesControl SystemsDr. Gollapalli NareshNo ratings yet
- Controllogix® Redundancy System Revision 11: When To Use These Release NotesDocument12 pagesControllogix® Redundancy System Revision 11: When To Use These Release Notesguruh anindraNo ratings yet
- TDS 600Document2 pagesTDS 600NicolaeNo ratings yet
- Layers and Types of CloudDocument4 pagesLayers and Types of CloudRocky ArunnNo ratings yet
- Aspire 1606 PDFDocument137 pagesAspire 1606 PDFExpertissimusNo ratings yet
- Design and Implementation of A Web-Based Timetable System For Higher Education InstitutionsDocument14 pagesDesign and Implementation of A Web-Based Timetable System For Higher Education InstitutionsjeffNo ratings yet
- Zusc D 15 00214R1Document11 pagesZusc D 15 00214R1shNo ratings yet
- Multidiscipline Reader DatasheetDocument2 pagesMultidiscipline Reader DatasheetZachariaNo ratings yet
- Network Devices (Hub, Repeater, Bridge, Switch, Router, GatewaysDocument9 pagesNetwork Devices (Hub, Repeater, Bridge, Switch, Router, Gatewaystanzaniasamson555No ratings yet
- Carrier Aggregation (CA) in 5G NRDocument3 pagesCarrier Aggregation (CA) in 5G NRayodele.matthew.oluremiNo ratings yet
- System Test: What Is System Testing ?Document6 pagesSystem Test: What Is System Testing ?Ujjwal PraveenNo ratings yet
- XVR User Manual V6.1.49.4Document80 pagesXVR User Manual V6.1.49.4Martín MontoyaNo ratings yet
- Instruction Manual - Eaton Internormen CCT 01 Set - Contamination Control Transmitter, E, 1.9 (Data Manager 2)Document36 pagesInstruction Manual - Eaton Internormen CCT 01 Set - Contamination Control Transmitter, E, 1.9 (Data Manager 2)Anshuman AgrawalNo ratings yet
- Vikash ReportDocument21 pagesVikash ReportMr FakeNo ratings yet
- OnTarget An Electronic Archery ScoringDocument5 pagesOnTarget An Electronic Archery ScoringLong Vo PhiNo ratings yet
- CloudSwyft Labs Management Platform Student GuideDocument8 pagesCloudSwyft Labs Management Platform Student GuideFundraising MOVeNo ratings yet
- 39Document15 pages39李德军No ratings yet
- Official Glossary - ISC 2 CC PreparationDocument12 pagesOfficial Glossary - ISC 2 CC PreparationR NilNo ratings yet
- Dragon War ELE-G18 S.W.A.P. - User ManualDocument6 pagesDragon War ELE-G18 S.W.A.P. - User ManualDebunking LifeNo ratings yet
- 11 07 18Document2 pages11 07 18Juanita luisa aNo ratings yet
- A Physical Layer Security Scheme With Compressed Sensing in Ofdm-Based Iot SystemsDocument6 pagesA Physical Layer Security Scheme With Compressed Sensing in Ofdm-Based Iot SystemsKanwal HabibNo ratings yet
- Chapter 3. Java Fundamentals and Control StructuresDocument50 pagesChapter 3. Java Fundamentals and Control StructuresTrần BảoNo ratings yet
- Automated Testing: Software Quality AssuranceDocument6 pagesAutomated Testing: Software Quality AssuranceahmadfirozNo ratings yet
- How To Install Kaspersky Security For Virtualization 6.x Agentless in An Infrastructure Managed by VMware NSX-V ManagerDocument35 pagesHow To Install Kaspersky Security For Virtualization 6.x Agentless in An Infrastructure Managed by VMware NSX-V ManagerAlain PresasNo ratings yet
- Electrical Circuits - 3Document4 pagesElectrical Circuits - 3KumarNo ratings yet