Download as pdf or txt
You might also like
- MGT 435 Week 3 AssignmentDocument5 pagesMGT 435 Week 3 AssignmentDavid Keith0% (1)
- A Design Manual For Water WheelsDocument82 pagesA Design Manual For Water WheelsNicolas InfanteNo ratings yet
- Albrecht On SallustDocument18 pagesAlbrecht On SallustliberaliviaNo ratings yet
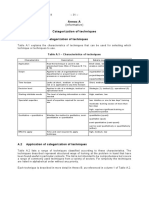
- IEC 31010 Categorization of Risk Assessment TechniquesDocument9 pagesIEC 31010 Categorization of Risk Assessment Techniquesdejan100% (1)
- QAHeaven.comDocument3 pagesQAHeaven.comandreicontan9425No ratings yet
- Supervised Learning (Materi Tambahan)Document27 pagesSupervised Learning (Materi Tambahan)Binar AriamuktiNo ratings yet
- pTIA DataX+ Dy0-001Document16 pagespTIA DataX+ Dy0-001AndyNo ratings yet
- Pattern Recognition-TheoryDocument2 pagesPattern Recognition-Theoryritu.agrawal31506No ratings yet
- Eltek Process FMEA Quick ReferenceDocument9 pagesEltek Process FMEA Quick Referencesantosh kumarNo ratings yet
- Practice J277 02 Sep 2020 MSDocument21 pagesPractice J277 02 Sep 2020 MSalexanderjimjohnNo ratings yet
- WIP - ML-22-DEC WeekendDocument40 pagesWIP - ML-22-DEC Weekendkumarswamy gorrepatiNo ratings yet
- Faceprep Readyreckoner AccentureDocument24 pagesFaceprep Readyreckoner AccentureJackNo ratings yet
- Anudeep MDocument2 pagesAnudeep MAnudeepNo ratings yet
- Midterm Task3Document3 pagesMidterm Task3Kenneth IlaoNo ratings yet
- Evaluating Alternatives: Best Concept Sub-Solutions Alternative FeaturesDocument20 pagesEvaluating Alternatives: Best Concept Sub-Solutions Alternative Features383860No ratings yet
- CS 598 Practical Statistical Learning: Course DescriptionDocument5 pagesCS 598 Practical Statistical Learning: Course DescriptionYza Clarizh M. Cambosa-ReyesNo ratings yet
- D TemplateDocument14 pagesD TemplateDvita BhatNo ratings yet
- Gibbs Chemistry - FPY - Version 3.0 - OC11e - 15.07 - Phase7B - Version2 - 17dec2022 - KanhaDocument9 pagesGibbs Chemistry - FPY - Version 3.0 - OC11e - 15.07 - Phase7B - Version2 - 17dec2022 - KanhaKanha GuptaNo ratings yet
- 6 Concept Selection & TestingDocument36 pages6 Concept Selection & Testingabubeker mohammedNo ratings yet
- Assignment Front SheetDocument10 pagesAssignment Front SheetSA WOWNo ratings yet
- Scene Recognition by Combining Local and Global Image DescriptorsDocument5 pagesScene Recognition by Combining Local and Global Image DescriptorsSouhaila DjaffalNo ratings yet
- FP Acc CrackerDocument14 pagesFP Acc CrackerTejas VedakNo ratings yet
- ITS OD 302 Javascript 0922Document2 pagesITS OD 302 Javascript 0922achref DONo ratings yet
- Access Health Digital: Stamp of ConfidenceDocument15 pagesAccess Health Digital: Stamp of ConfidenceVIPUL SAININo ratings yet
- FMEA Vs FMECADocument10 pagesFMEA Vs FMECAAndika Haris NugrohoNo ratings yet
- EV Process FMEA Quick ReferenceDocument9 pagesEV Process FMEA Quick Referencesantosh kumarNo ratings yet
- FluentDocument30 pagesFluentijaz fazilNo ratings yet
- 1.1 - XPD124 Unit Overview2024S1Document23 pages1.1 - XPD124 Unit Overview2024S1Md. ObaydullahNo ratings yet
- DVCon Europe 2015 T13 PresentationDocument69 pagesDVCon Europe 2015 T13 PresentationJon DCNo ratings yet
- Heuristic Risk-Based Test Automation: A Hybrid ApproachDocument10 pagesHeuristic Risk-Based Test Automation: A Hybrid ApproachPako Benjamin MokoweNo ratings yet
- Grade 11 Information Technology - Term 1Document7 pagesGrade 11 Information Technology - Term 1Omali JamesNo ratings yet
- Semi-Supervised Domain Adaptation Via Minimax EntropyDocument9 pagesSemi-Supervised Domain Adaptation Via Minimax EntropychatgptfortccNo ratings yet
- Big Data Analytics For Smart Manufacturing Systems ReportDocument9 pagesBig Data Analytics For Smart Manufacturing Systems Reportkumarveepan958No ratings yet
- COSC2511 Final Project 2023 Sem 2Document4 pagesCOSC2511 Final Project 2023 Sem 2شہزاد رحیمNo ratings yet
- Lecture 02Document144 pagesLecture 02Charles UchôaNo ratings yet
- Prediction Task Decisions Value Proposition Data Collection Data SourcesDocument5 pagesPrediction Task Decisions Value Proposition Data Collection Data SourcesNerdy NeandertalNo ratings yet
- ITC LAB Outline Spring 2021Document6 pagesITC LAB Outline Spring 2021zain arshadNo ratings yet
- Test - ML Cheat Sheet: by ViaDocument2 pagesTest - ML Cheat Sheet: by ViaAl kuyuudiNo ratings yet
- SWT4 TimDocument88 pagesSWT4 TimDiệu Anh NguyễnNo ratings yet
- 4-2 ProjectDocument18 pages4-2 Projectnakkasiri333No ratings yet
- Cambridge International AS & A Level: Computer Science 9618/ NADocument12 pagesCambridge International AS & A Level: Computer Science 9618/ NAdiyorbek abduvohidovNo ratings yet
- 李鹏飞( Pengfei Li): Chapter 3 MethodsDocument116 pages李鹏飞( Pengfei Li): Chapter 3 MethodsMd Omar FaruqNo ratings yet
- Gibbs Chemistry - FPY - Version 3.0 - Book - OC11e - 23.02 - 7D - Version - 2 - 09-12-2022 - KanhaDocument9 pagesGibbs Chemistry - FPY - Version 3.0 - Book - OC11e - 23.02 - 7D - Version - 2 - 09-12-2022 - KanhaKanha GuptaNo ratings yet
- Course Enrollment On Blackboard: Announced On E-ComDocument26 pagesCourse Enrollment On Blackboard: Announced On E-ComSherif MagdyNo ratings yet
- Airbnb Price EstimationDocument1 pageAirbnb Price Estimationkhairunnisa aulyahNo ratings yet
- BNK464 Sept 20 Marking RubricDocument3 pagesBNK464 Sept 20 Marking RubricsadNo ratings yet
- Improving Defect Classification - Stein Falessi - SEPGNA14Document21 pagesImproving Defect Classification - Stein Falessi - SEPGNA14Mohamed SaidNo ratings yet
- Cyber Security VAPT v1.0 Published - CompressedDocument29 pagesCyber Security VAPT v1.0 Published - Compressedasamad54100% (2)
- Take-Home Exam Notes: Table 1: Topics Potentially To Be TestedDocument3 pagesTake-Home Exam Notes: Table 1: Topics Potentially To Be TestedAavesh DagarNo ratings yet
- Course OutlineDocument6 pagesCourse OutlineChaman Ali AfzaliNo ratings yet
- What Is Conjoint AnalysisDocument6 pagesWhat Is Conjoint AnalysisAyush GargNo ratings yet
- ISE102 - Assessment 1 - 20240603Document6 pagesISE102 - Assessment 1 - 20240603Rachel HuynhNo ratings yet
- MBA II Sem - MGMT438 - Predictive Analysis Using R - JayantKishorPurohit - JayantKishor PurohitDocument5 pagesMBA II Sem - MGMT438 - Predictive Analysis Using R - JayantKishorPurohit - JayantKishor Purohittiya23rdNo ratings yet
- C Sharp and Java ComparativeDocument28 pagesC Sharp and Java ComparativeSai KarthikNo ratings yet
- Aspen Shell & Tube Exchanger Study Guide: Exam Prep For UsersDocument6 pagesAspen Shell & Tube Exchanger Study Guide: Exam Prep For UsersMiguelÁngelHernándezOsorioNo ratings yet
- Lamp PermenPU19 2011Document47 pagesLamp PermenPU19 2011Luthfi TaufiqNo ratings yet
- ST - Unit - II PDFDocument30 pagesST - Unit - II PDFjenniferg.cseNo ratings yet
- Code Review Checklist: Name of Reviewer: Name of Coder: File(s) Under Review: Brief Description of Change Being ReviewedDocument1 pageCode Review Checklist: Name of Reviewer: Name of Coder: File(s) Under Review: Brief Description of Change Being Reviewedanarki85No ratings yet
- Bonacorsi Consulting Control Master TemplateDocument23 pagesBonacorsi Consulting Control Master TemplateSteven Bonacorsi100% (4)
- Specimen MS - Paper 2 OCR Computer Science GCSEDocument23 pagesSpecimen MS - Paper 2 OCR Computer Science GCSEIntisharNo ratings yet
- Learning Machine Learning With YellowbrickDocument64 pagesLearning Machine Learning With YellowbrickmarciliomeiraNo ratings yet
- 03 0478 22 MS Prov Rma 01032023030542Document16 pages03 0478 22 MS Prov Rma 01032023030542Laksh SardaNo ratings yet
- Sheikhupura 500Kv Grid Station: Usaid Energy Policy ProgramDocument9 pagesSheikhupura 500Kv Grid Station: Usaid Energy Policy ProgramMuhammad Ramzan KhanNo ratings yet
- Synthesis PaperDocument17 pagesSynthesis Paperapi-511635668No ratings yet
- SoundDocument15 pagesSoundNIRMALA A/P GOVINDASAMY MoeNo ratings yet
- Tourism EssayDocument2 pagesTourism EssayAnnae CampbellNo ratings yet
- Raw Material CatalogueDocument6 pagesRaw Material CatalogueKhalil EbrahimNo ratings yet
- PackML Definition Document V3.0 FinalDocument22 pagesPackML Definition Document V3.0 FinalTulia Concepcion PerezNo ratings yet
- Electrical SyllabusDocument2 pagesElectrical Syllabusharsh dubeyNo ratings yet
- A Report Writing (Amaco)Document9 pagesA Report Writing (Amaco)Stive AustineNo ratings yet
- Geotextiles and Geomembranes 48 (2020) 110-119Document10 pagesGeotextiles and Geomembranes 48 (2020) 110-119Alexander RiosNo ratings yet
- Ganpat University U.V. Patel College of Engineering Mechatronics Engineering Department Experiment: - 4Document5 pagesGanpat University U.V. Patel College of Engineering Mechatronics Engineering Department Experiment: - 4Jaygopal SharmaNo ratings yet
- Trial SPM MT 2014 Jawapan K2Document12 pagesTrial SPM MT 2014 Jawapan K2Mohd Ellif SarianNo ratings yet
- Resume Tracy 2018 Portfolio2Document2 pagesResume Tracy 2018 Portfolio2api-418542159No ratings yet
- 2014 Zimnyaya Shkola Po Programmirovaniu Harkov Dyen 2 S Nagin Vysshaya Liga enDocument9 pages2014 Zimnyaya Shkola Po Programmirovaniu Harkov Dyen 2 S Nagin Vysshaya Liga enHarikrishna ShenoyNo ratings yet
- Guidelines For Admission To MCA Program at HBTU, Kanpur For Session 2019-20 (Offline-On Campus Counselling)Document4 pagesGuidelines For Admission To MCA Program at HBTU, Kanpur For Session 2019-20 (Offline-On Campus Counselling)Nikky SinghNo ratings yet
- DBL1 Avr Sincro ManualDocument11 pagesDBL1 Avr Sincro ManualAnonymous vqsuRyNo ratings yet
- PDFDocument38 pagesPDFshady boyNo ratings yet
- NIPP Grid Study Final Report April 2007 Executive Summary and Background ReportDocument134 pagesNIPP Grid Study Final Report April 2007 Executive Summary and Background ReportSubrahmanyan Edamana100% (1)
- Checkpoint 1Document4 pagesCheckpoint 1nellyNo ratings yet
- Ticket MYNL QGQS IYOW OutDocument1 pageTicket MYNL QGQS IYOW OutHarsha RajendranNo ratings yet
- 8 Module VIII Disaster Risk Reduction and ManagementDocument39 pages8 Module VIII Disaster Risk Reduction and ManagementSunny SshiNo ratings yet
- LNG Expert Training - Korea OktoberDocument9 pagesLNG Expert Training - Korea OktoberMasri MulyadiNo ratings yet
- Ivens Ellen Final Year 2020 2Document4 pagesIvens Ellen Final Year 2020 2api-527207076No ratings yet
- Excerpt From Low-Code/No-Code: Citizen Developers and The Surprising Future of Business ApplicationsDocument20 pagesExcerpt From Low-Code/No-Code: Citizen Developers and The Surprising Future of Business ApplicationsPhil SimonNo ratings yet
- Curriculum Vitae: Maneela BajpaiDocument3 pagesCurriculum Vitae: Maneela Bajpaimaneela bajpaiNo ratings yet
- NEC Subcontract SuperSubsDocument88 pagesNEC Subcontract SuperSubsAlan HughesNo ratings yet
- D5032408 Setting Up and Using Transportable Cutting and Shaping Machines in The Workplace - LFX - Dec19Document12 pagesD5032408 Setting Up and Using Transportable Cutting and Shaping Machines in The Workplace - LFX - Dec19Himanshu MishraNo ratings yet
- Tender Text: HYDRUS Ultrasonic Water Meter DN 15Document4 pagesTender Text: HYDRUS Ultrasonic Water Meter DN 15Anselmo LimaNo ratings yet