Download as pdf or txt
You might also like
- Service Manual - Load SensingDocument144 pagesService Manual - Load Sensinggilvanfranqueta97% (33)
- InterViews. Learning The Craft of Qualitative Research Interviewing (1 Ed) - Kvale 1996 PDFDocument173 pagesInterViews. Learning The Craft of Qualitative Research Interviewing (1 Ed) - Kvale 1996 PDFquinojotaNo ratings yet
- Switching Power Supply Design: A Concise Practical HandbookFrom EverandSwitching Power Supply Design: A Concise Practical HandbookNo ratings yet
- KOYO ESCALATOR Electrical Schematic Diagram VVVFDocument24 pagesKOYO ESCALATOR Electrical Schematic Diagram VVVFFranklin Palacios100% (4)
- KOYO Escalator Mainboard Manual BookDocument36 pagesKOYO Escalator Mainboard Manual BookFranklin Palacios88% (8)
- Sample Civil ComplaintDocument5 pagesSample Civil ComplaintHazelmer Fernandez100% (3)
- Bank Shi-Urkantzu 4 PDFDocument91 pagesBank Shi-Urkantzu 4 PDFJames Johnson100% (3)
- Brake ControlDocument105 pagesBrake ControlLuis PerezNo ratings yet
- Electronic Control System ToyotaDocument11 pagesElectronic Control System ToyotagabotoyoNo ratings yet
- Basic Governer ControlsDocument14 pagesBasic Governer ControlspankajNo ratings yet
- Brake ControlDocument86 pagesBrake ControlNicolás BozzoNo ratings yet
- OcvDocument4 pagesOcvIsmail SetiawanNo ratings yet
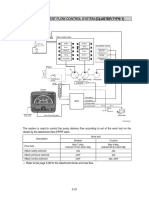
- Group 9: Group 9 Attachment Flow Control System Attachment Flow Control System (Cluster Type 1) (Cluster Type 1)Document1 pageGroup 9: Group 9 Attachment Flow Control System Attachment Flow Control System (Cluster Type 1) (Cluster Type 1)deniden2013No ratings yet
- KYTOLADocument4 pagesKYTOLAshfservicosNo ratings yet
- Actuador Lmb24 - 3 On-OffDocument5 pagesActuador Lmb24 - 3 On-OffLuigi Medina MendozaNo ratings yet
- KVMG 400 Control ValveDocument39 pagesKVMG 400 Control Valvevitor santosNo ratings yet
- DTC C1249/49 Open in Stop Light Switch Circuit: DescriptionDocument4 pagesDTC C1249/49 Open in Stop Light Switch Circuit: DescriptionAmil AnAmNo ratings yet
- Models LMDocument4 pagesModels LMEnrique BarriosNo ratings yet
- Brake Switch B HighDocument2 pagesBrake Switch B HighDannyDDannyDNo ratings yet
- Level ControlDocument36 pagesLevel ControlWogayehuGizawNo ratings yet
- Minicarregadeira JCBDocument36 pagesMinicarregadeira JCBMarco OlivettoNo ratings yet
- Group 5 Travel Speed Control System (Cluster Type 1) (Cluster Type 1)Document2 pagesGroup 5 Travel Speed Control System (Cluster Type 1) (Cluster Type 1)deniden2013No ratings yet
- CabinDocument16 pagesCabinPeetNo ratings yet
- B II M Trafo CorrienteDocument2 pagesB II M Trafo CorrienteÁlvaro Manterola LazcanoNo ratings yet
- AC 665-1040-039 - en (Crane Operator's Cab)Document18 pagesAC 665-1040-039 - en (Crane Operator's Cab)Arslan AhmedNo ratings yet
- SEL-311C: Transmission Protection SystemDocument12 pagesSEL-311C: Transmission Protection SystemRodolfoNo ratings yet
- DTC C1365/54 Malfunction in Acc Pressure Sensor: Circuit DescriptionDocument4 pagesDTC C1365/54 Malfunction in Acc Pressure Sensor: Circuit DescriptionHam NgoNo ratings yet
- Hyd0029 DX Control Valve KVMG 270Document39 pagesHyd0029 DX Control Valve KVMG 270Abdelrahman SharafNo ratings yet
- 5 9 PDFDocument1 page5 9 PDFTaha RdmanNo ratings yet
- 13OBDG06 Hybrid DiagnosticsDocument462 pages13OBDG06 Hybrid DiagnosticsIonflorin TelegaruNo ratings yet
- Group 9: Group 9 Attachment Flow Control System Attachment Flow Control System (Cluster Type 1)Document1 pageGroup 9: Group 9 Attachment Flow Control System Attachment Flow Control System (Cluster Type 1)Александр ПанкратовNo ratings yet
- Catalog Mechanic Motorise SM6Document2 pagesCatalog Mechanic Motorise SM6Ben DavisNo ratings yet
- 451 PF00074Document16 pages451 PF00074Islam AshrafNo ratings yet
- Maintenance Lift & EscalatorDocument6 pagesMaintenance Lift & EscalatorAndrie Eka saputraNo ratings yet
- Group 9: Group 9 Attachment Flow Control System Attachment Flow Control SystemDocument1 pageGroup 9: Group 9 Attachment Flow Control System Attachment Flow Control SystemDavidNo ratings yet
- LM 5023Document38 pagesLM 5023Kartik hegdeNo ratings yet
- Cruise ControlDocument44 pagesCruise ControlMirceaNo ratings yet
- Description and Operation: Post Crash AlertDocument77 pagesDescription and Operation: Post Crash AlertCibernetica pasin Alta tecnologia100% (1)
- AN032-Closed Loop Motor Control With TMC4361 For StepperDocument38 pagesAN032-Closed Loop Motor Control With TMC4361 For SteppergnugplNo ratings yet
- A3295 Hall SenzorDocument9 pagesA3295 Hall SenzorkukurikuyuNo ratings yet
- Hy m900 Hy Lm900 SeriesDocument7 pagesHy m900 Hy Lm900 SeriesCao ChinhNo ratings yet
- PTFE1223 13MY MIRAGE TH J Spec Part2 Revised1Document89 pagesPTFE1223 13MY MIRAGE TH J Spec Part2 Revised1Genevieve Diaz MorenoNo ratings yet
- SX125 CompleteDocument109 pagesSX125 CompleteMuhamad KarisNo ratings yet
- Section 5 Mechatronics SystemDocument4 pagesSection 5 Mechatronics Systemdeniden2013No ratings yet
- 9. نظام التحكم في التدفقDocument1 page9. نظام التحكم في التدفقالمهندسوليدالطويلNo ratings yet
- Fuse & Relay MalibuDocument21 pagesFuse & Relay MalibuBasim FakhryNo ratings yet
- 22-20 AstDocument56 pages22-20 AstOliver IrrazabalNo ratings yet
- Service Training Malaga 365B Ii & 385B Hydraulic Excavators: Smart BoomDocument6 pagesService Training Malaga 365B Ii & 385B Hydraulic Excavators: Smart BoomSamit JorgeNo ratings yet
- 451 PF00074Document16 pages451 PF00074engrshoaib2308No ratings yet
- Group 9: Group 9 Attachment Flow Control System Attachment Flow Control SystemDocument1 pageGroup 9: Group 9 Attachment Flow Control System Attachment Flow Control SystemLenomar Bessa de PaulaNo ratings yet
- 020-PT500 Component&CircuitDocument78 pages020-PT500 Component&CircuitCorzariodelabiosferaNo ratings yet
- .1 Product Advantages Mobile CraneDocument17 pages.1 Product Advantages Mobile CraneMed BakirNo ratings yet
- Compact Crane Product Advantages: Max. Load Capacity: 55 T Max. Height Under Hook: 50 M Max. Radius: 46 MDocument12 pagesCompact Crane Product Advantages: Max. Load Capacity: 55 T Max. Height Under Hook: 50 M Max. Radius: 46 MMed BakirNo ratings yet
- HYD0042 DL Brake SystemDocument13 pagesHYD0042 DL Brake SystemErfan.TNo ratings yet
- Electrohydraulic Control SystemDocument15 pagesElectrohydraulic Control Systemnayi vishal natverbhaiNo ratings yet
- 010-PT500 IntroductionDocument39 pages010-PT500 IntroductionCorzariodelabiosferaNo ratings yet
- Materi Brake System Dozer D155-6 & D375A-6RDocument21 pagesMateri Brake System Dozer D155-6 & D375A-6Raarizal100% (1)
- KA3511Document21 pagesKA3511AliNo ratings yet
- c300 (Korando) IV ElectricDocument186 pagesc300 (Korando) IV Electricm.gavrielNo ratings yet
- Tension Controller Electromagnetic Clutch/Brake General Catalog 2018Document162 pagesTension Controller Electromagnetic Clutch/Brake General Catalog 2018Sajjad HussainNo ratings yet
- CVS 1000L Electro-Pneumatic Linear Positioner: Product ManualDocument12 pagesCVS 1000L Electro-Pneumatic Linear Positioner: Product Manualmhidayat108No ratings yet
- EASA Module 13 - Book 1 Part 5 - Autoflight PDFDocument176 pagesEASA Module 13 - Book 1 Part 5 - Autoflight PDFAhmed AlrawahiNo ratings yet
- Auger BrochureDocument4 pagesAuger Brochurefery adi sulistyoNo ratings yet
- AugerDocument4 pagesAugerfery adi sulistyoNo ratings yet
- Hydrostatic Circuitry (Tank & Filter) - S570Document5 pagesHydrostatic Circuitry (Tank & Filter) - S570fery adi sulistyoNo ratings yet
- Undercarriage Handbook: Helping You Get The Most From Your UndercarriageDocument24 pagesUndercarriage Handbook: Helping You Get The Most From Your Undercarriagefery adi sulistyoNo ratings yet
- Otr Pattern Catalogue TyresDocument12 pagesOtr Pattern Catalogue Tyresfery adi sulistyoNo ratings yet
- Lab Test HivDocument2 pagesLab Test HivCindy MoraNo ratings yet
- Business Startup CostsDocument11 pagesBusiness Startup CostsRaul CollazziNo ratings yet
- A Lady in The Lake EssayDocument4 pagesA Lady in The Lake EssayMason BarberNo ratings yet
- 01 Drillmec Company Profile E78913cf d70c 465b 911a Ab1b009160baDocument13 pages01 Drillmec Company Profile E78913cf d70c 465b 911a Ab1b009160baDaniel Marulituah SinagaNo ratings yet
- Key Events in Europian IntegrationionDocument1 pageKey Events in Europian IntegrationionAdriatik MetaNo ratings yet
- Erie Downtown Master PlanDocument150 pagesErie Downtown Master PlanMattMartinNo ratings yet
- Aerolab Finals ReviewerDocument3 pagesAerolab Finals ReviewerMikaelarae GermanNo ratings yet
- Conectores y DiagramasDocument6 pagesConectores y Diagramasrodrigo michelNo ratings yet
- Cabagnot Vs CSCDocument10 pagesCabagnot Vs CSCKcompacionNo ratings yet
- International Fisher EffectDocument6 pagesInternational Fisher EffectJaphy100% (1)
- Lgtool User Manual: Using Service Area Account Activation and RegistrationDocument11 pagesLgtool User Manual: Using Service Area Account Activation and RegistrationBayarmagnai BNo ratings yet
- Airlines Reservation SynopsisDocument49 pagesAirlines Reservation SynopsisSagar NNo ratings yet
- Wages Structure in India Under The Minimum Wages Act 1948Document61 pagesWages Structure in India Under The Minimum Wages Act 1948Karan Bhutani100% (4)
- Sneaky Hypnosis PhrasesDocument4 pagesSneaky Hypnosis PhrasesRaiyanq67% (3)
- Yaaqshiid: 1 Xaafadaha, Laamaha Iyo Waax-AhaDocument4 pagesYaaqshiid: 1 Xaafadaha, Laamaha Iyo Waax-AhaYusuf HusseinNo ratings yet
- Report On Caste Based Atrocities On Dalits in Varanasi and Surrounding Areas in Uttar PradeshDocument31 pagesReport On Caste Based Atrocities On Dalits in Varanasi and Surrounding Areas in Uttar PradeshPeoples' Vigilance Committee on Human rightsNo ratings yet
- I (-02t,-1m - : - .8m-R-18m-M - 8A) :-+$-3 # - 1&) +-0bo# K! !!!: Milarapa's Guru Yoga and Tsok Offering !Document34 pagesI (-02t,-1m - : - .8m-R-18m-M - 8A) :-+$-3 # - 1&) +-0bo# K! !!!: Milarapa's Guru Yoga and Tsok Offering !Kaleb Singh100% (1)
- STATISTICAL PROCESS CONTROL, Kolmetz Handbook of Process Equipment DesignDocument35 pagesSTATISTICAL PROCESS CONTROL, Kolmetz Handbook of Process Equipment DesignHelena AdamNo ratings yet
- Child Adolescent Module5 Factors Affecting Cognitive DevelopmentDocument15 pagesChild Adolescent Module5 Factors Affecting Cognitive DevelopmentBunso A. Loresto60% (5)
- Bhupal Case Study PDFDocument4 pagesBhupal Case Study PDFSuman ChaudharyNo ratings yet
- Civil Engineer ListDocument9 pagesCivil Engineer ListMohammad AtiqueNo ratings yet
- Revel'S End: Prison Break Prison BreakDocument5 pagesRevel'S End: Prison Break Prison BreakAutNo ratings yet
- Vintage Airplane - Feb 1987Document32 pagesVintage Airplane - Feb 1987Aviation/Space History LibraryNo ratings yet
- Environmental Term Paper TopicsDocument8 pagesEnvironmental Term Paper Topicsea6p1e99100% (1)
- Micro Focus Cobol Survey Itl 2015 Report PTDocument22 pagesMicro Focus Cobol Survey Itl 2015 Report PTprojrev2No ratings yet
- Characteristics of Data WarehousingDocument5 pagesCharacteristics of Data WarehousingAnamika Rai PandeyNo ratings yet