Download as pdf or txt
You might also like
- t1080s ManualDocument191 pagest1080s ManualMorena Estatal Arizona100% (5)
- Pranaview Booklet 10Document16 pagesPranaview Booklet 10Frabato BardonNo ratings yet
- Cathy O'Brien & Mark Philips - Trance Formation of America2Document224 pagesCathy O'Brien & Mark Philips - Trance Formation of America2bld200797% (35)
- Sample Questions Mathematics Category 2Document8 pagesSample Questions Mathematics Category 2Rufat Asgarov100% (1)
- Part VI - Chapter 5 - Fundamentals of Design - Part 1Document176 pagesPart VI - Chapter 5 - Fundamentals of Design - Part 1Pedro Gomes100% (2)
- Human Activity Recognition Based On Local Linear Embed - 2024 - Expert Systems WDocument13 pagesHuman Activity Recognition Based On Local Linear Embed - 2024 - Expert Systems WPhi MaiNo ratings yet
- SURFDocument19 pagesSURFsunilkumarkn26No ratings yet
- Sensors 23 09085Document26 pagesSensors 23 09085Y SNo ratings yet
- New Approach To Similarity Detection by Combining Technique Three-Patch Local Binary Patterns (TP-LBP) With Support Vector MachineDocument10 pagesNew Approach To Similarity Detection by Combining Technique Three-Patch Local Binary Patterns (TP-LBP) With Support Vector MachineIAES IJAINo ratings yet
- Full Waveform Analysis For Long Range 3D Imaging Laser RadarDocument12 pagesFull Waveform Analysis For Long Range 3D Imaging Laser RadarmcgagliardiNo ratings yet
- An Unsupervised Learning Model For Deformable Medical Image RegistrationDocument9 pagesAn Unsupervised Learning Model For Deformable Medical Image RegistrationShuai ZhangNo ratings yet
- Applied Sciences: Sign Language Recognition Using Two-Stream Convolutional Neural Networks With Wi-Fi SignalsDocument13 pagesApplied Sciences: Sign Language Recognition Using Two-Stream Convolutional Neural Networks With Wi-Fi SignalssharulariffinshafieNo ratings yet
- Enhanced DV Hop Localization Algorithm For Wireless Sensor NetworksDocument8 pagesEnhanced DV Hop Localization Algorithm For Wireless Sensor NetworksEditor IJTSRDNo ratings yet
- Editorial Smart Antennas and Intelligent Sensors Based Systems: Enabling Technologies and Applications, 2020Document3 pagesEditorial Smart Antennas and Intelligent Sensors Based Systems: Enabling Technologies and Applications, 2020Dr. Farman ullahNo ratings yet
- Human Tracking SystemDocument13 pagesHuman Tracking SystemtechmindzNo ratings yet
- ICETIT Proceeding Book 2012Document31 pagesICETIT Proceeding Book 2012sudhakarcjNo ratings yet
- J Measurement 2021 109546Document11 pagesJ Measurement 2021 109546Abhishek KumarNo ratings yet
- Multi Target Tracking ThesisDocument6 pagesMulti Target Tracking Thesiskatrinagreeneugene100% (2)
- Symmetry: Unsupervised Anomaly Detection Approach For Time-Series in Multi-Domains Using Deep Reconstruction ErrorDocument22 pagesSymmetry: Unsupervised Anomaly Detection Approach For Time-Series in Multi-Domains Using Deep Reconstruction ErrorSakshi ChoudharyNo ratings yet
- Evaluation of Fruit Ripeness Using Electronic Nose: This Paper Describes The Use of AnDocument34 pagesEvaluation of Fruit Ripeness Using Electronic Nose: This Paper Describes The Use of AnpadmaNo ratings yet
- Short-Term Hand Gestures Recognition Based On Electromyography SignalsDocument9 pagesShort-Term Hand Gestures Recognition Based On Electromyography SignalsIAES IJAINo ratings yet
- 1 s2.0 S0263224121002402 MainDocument19 pages1 s2.0 S0263224121002402 Mainvikas sharmaNo ratings yet
- Top Cited Articles in Signal & Image Processing 2021-2022Document7 pagesTop Cited Articles in Signal & Image Processing 2021-2022sipijNo ratings yet
- Improved Data Discrimination in Wireless Sensor Networks: B. A. Sabarish, S. ShanmugapriyaDocument3 pagesImproved Data Discrimination in Wireless Sensor Networks: B. A. Sabarish, S. Shanmugapriyamurthy_siri22No ratings yet
- Human Activity Recognition Based On Time Series Analysis Using U-NetDocument21 pagesHuman Activity Recognition Based On Time Series Analysis Using U-NetEzequiel França Dos SantosNo ratings yet
- Tax Et Al., 2019Document15 pagesTax Et Al., 2019Noah KimNo ratings yet
- 2020 Paper 1Document13 pages2020 Paper 1Vikas KaushikNo ratings yet
- Energy Computation Using DCT For Brain Computer Interface Motor Imagery ClassificationDocument4 pagesEnergy Computation Using DCT For Brain Computer Interface Motor Imagery ClassificationchakriNo ratings yet
- Sensors: Fault Diagnosis From Raw Sensor Data Using Deep Neural Networks Considering Temporal CoherenceDocument17 pagesSensors: Fault Diagnosis From Raw Sensor Data Using Deep Neural Networks Considering Temporal Coherenceandrew1903No ratings yet
- Elasticity Detection of IMT of Common Carotid ArteryDocument4 pagesElasticity Detection of IMT of Common Carotid Arterypurushothaman sinivasanNo ratings yet
- Voter Authentication System Using Feature Level Fusion of Iris, Face and PalmprintDocument10 pagesVoter Authentication System Using Feature Level Fusion of Iris, Face and PalmprintIJRASETPublicationsNo ratings yet
- Okawa 2020Document41 pagesOkawa 2020Raj PatilNo ratings yet
- 2020 Data Driven Feature Extraction For Analog Circuit Fault Diagnosis Using 1D Convolutional Neural NetworkDocument11 pages2020 Data Driven Feature Extraction For Analog Circuit Fault Diagnosis Using 1D Convolutional Neural NetworkimadldnNo ratings yet
- Finger Vein Identification System Using Capsule Networks With Hyperparameter TuningDocument8 pagesFinger Vein Identification System Using Capsule Networks With Hyperparameter TuningIAES IJAINo ratings yet
- Transfer Learning For sEMG Hand Gestures Recognition Using Convolutional Neural NetworkDocument6 pagesTransfer Learning For sEMG Hand Gestures Recognition Using Convolutional Neural Networkathira devarajNo ratings yet
- Sensors: Bearing Fault Diagnosis Method Based On Deep Convolutional Neural Network and Random Forest Ensemble LearningDocument21 pagesSensors: Bearing Fault Diagnosis Method Based On Deep Convolutional Neural Network and Random Forest Ensemble LearningFelipe Andres Figueroa VidelaNo ratings yet
- Generalize DR BFDocument12 pagesGeneralize DR BFvliviuNo ratings yet
- A Data Aggregation Approach Exploiting Spatial and Temporal Correlation Among Sensor Data in Wireless Sensor NetworksDocument5 pagesA Data Aggregation Approach Exploiting Spatial and Temporal Correlation Among Sensor Data in Wireless Sensor NetworksManno ChNo ratings yet
- Environmental Monitoring -PHASE 3 PDFDocument10 pagesEnvironmental Monitoring -PHASE 3 PDFshameemshan12No ratings yet
- Unsupervised Anomaly Detection in Multivariate Time SeriesDocument32 pagesUnsupervised Anomaly Detection in Multivariate Time SeriesIrsyad RamliNo ratings yet
- Environmental Monitoring -PHASE 3 PDFDocument10 pagesEnvironmental Monitoring -PHASE 3 PDFshameemshan12No ratings yet
- First PaperDocument4 pagesFirst Paperachaparala4499No ratings yet
- 2020 Paper 3Document8 pages2020 Paper 3Vikas KaushikNo ratings yet
- Networking Anomaly Detection Using DSNS and Particle Swarm Optimization With Re-ClusteringDocument6 pagesNetworking Anomaly Detection Using DSNS and Particle Swarm Optimization With Re-ClusteringzaigNo ratings yet
- Int. J. Electron. Commun. (AEÜ) : Maryam Abdolkarimi, Sepideh Adabi, Arash Shari FiDocument13 pagesInt. J. Electron. Commun. (AEÜ) : Maryam Abdolkarimi, Sepideh Adabi, Arash Shari Fiivahid28No ratings yet
- Watermarking 3D Surface Models Into 3D Surface Models Based On ANFISDocument6 pagesWatermarking 3D Surface Models Into 3D Surface Models Based On ANFISinfos2magi856No ratings yet
- Automatic Modulation ClassificationBased On Deep Learning For SDRDocument13 pagesAutomatic Modulation ClassificationBased On Deep Learning For SDRSavindu NanayakkaraNo ratings yet
- Preprocessing-Free Gear Fault Diagnosis Using Small Datasets With Deep Convolutional Neural Network-Based Transfer LearningDocument13 pagesPreprocessing-Free Gear Fault Diagnosis Using Small Datasets With Deep Convolutional Neural Network-Based Transfer LearningCesar Vargas ArayaNo ratings yet
- Comparation Analysis of Ensemble Technique With Boosting (Xgboost) and Bagging (Randomforest) For Classify Splice Junction Dna Sequence CategoryDocument10 pagesComparation Analysis of Ensemble Technique With Boosting (Xgboost) and Bagging (Randomforest) For Classify Splice Junction Dna Sequence CategoryFatrinaNo ratings yet
- A New Bearing Fault Diagnosis Method Based On Modified Convolutional Neural NetworksDocument9 pagesA New Bearing Fault Diagnosis Method Based On Modified Convolutional Neural NetworksRobert MaximilianNo ratings yet
- Paper 2-Color Radiomap Interpolation For Efficient Fingerprint WiFi-based Indoor Location Estimation PDFDocument6 pagesPaper 2-Color Radiomap Interpolation For Efficient Fingerprint WiFi-based Indoor Location Estimation PDFRakhmadhanyPrimanandaNo ratings yet
- Rajeev Insttitute of Technology: Dept. of Electronics & Communication EngineeringDocument18 pagesRajeev Insttitute of Technology: Dept. of Electronics & Communication EngineeringSharadhiNo ratings yet
- Entropy 22 00851Document23 pagesEntropy 22 00851Caio WerneckNo ratings yet
- Thesis On Security in Wireless Sensor NetworksDocument6 pagesThesis On Security in Wireless Sensor Networksgbww46x7100% (2)
- Closing The Data Gap Between Simulation and Modal Test With Virtualized Testing For An Improved FE Model UpdateDocument13 pagesClosing The Data Gap Between Simulation and Modal Test With Virtualized Testing For An Improved FE Model UpdatevinoesakkiNo ratings yet
- Air Signature Recognition Using Deep Convolutional Neural Network-Based Sequential ModelDocument6 pagesAir Signature Recognition Using Deep Convolutional Neural Network-Based Sequential ModelAzeez ReadhNo ratings yet
- Sensor Selection and Precoding Strategies For Wireless Sensor NetworksDocument11 pagesSensor Selection and Precoding Strategies For Wireless Sensor Networksmskumar_meNo ratings yet
- Analysis of Big Data in Running Biomechanics: Application of Multivariate Analysis and Machine Learning MethodsDocument4 pagesAnalysis of Big Data in Running Biomechanics: Application of Multivariate Analysis and Machine Learning MethodsNithya SukumarNo ratings yet
- Advanced Condition Monitoring and Fault Embedded Expert System Diagnosis Turbo-Alternators Using AnDocument4 pagesAdvanced Condition Monitoring and Fault Embedded Expert System Diagnosis Turbo-Alternators Using AnOihane GomezNo ratings yet
- A Sink Based Data Gathering Technique by Using Clustering For Wireless Sensor NetworksDocument9 pagesA Sink Based Data Gathering Technique by Using Clustering For Wireless Sensor NetworksTELKOMNIKANo ratings yet
- Methodology: What Does Data Acquisition Mean?Document6 pagesMethodology: What Does Data Acquisition Mean?Nithish K mNo ratings yet
- Neurocomputing: Huikai Shao, Dexing ZhongDocument12 pagesNeurocomputing: Huikai Shao, Dexing ZhongHou BouNo ratings yet
- Future Computing With Iot and Cloud Computing: D. S. ParkDocument7 pagesFuture Computing With Iot and Cloud Computing: D. S. ParkAravind PadmanabhanNo ratings yet
- Comprehensive MPoint - A Method For 3D Point Cloud Generation of Human Bodies Utilizing FMCW MIMO Mm-Wave RadarDocument21 pagesComprehensive MPoint - A Method For 3D Point Cloud Generation of Human Bodies Utilizing FMCW MIMO Mm-Wave RadaraymenbouthaalebNo ratings yet
- Automatic Target Recognition: Advances in Computer Vision Techniques for Target RecognitionFrom EverandAutomatic Target Recognition: Advances in Computer Vision Techniques for Target RecognitionNo ratings yet
- Online EarningDocument3 pagesOnline Earningwordwork373No ratings yet
- Arindam Chaudhuri - The TruthDocument8 pagesArindam Chaudhuri - The TruthCatalyticGirlNo ratings yet
- Introduction To Business Research Methods Vamsi KrishnaDocument25 pagesIntroduction To Business Research Methods Vamsi KrishnaEng MatanaNo ratings yet
- Management Information System: Bba LLB by The - Lawgical - WorldDocument15 pagesManagement Information System: Bba LLB by The - Lawgical - WorldK venkataiahNo ratings yet
- You Are Anointed For Good's Works PDFDocument2 pagesYou Are Anointed For Good's Works PDFJohn Nzinahora0% (1)
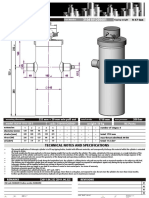
- Cilindro Penta Hydraulic PowerDocument1 pageCilindro Penta Hydraulic PowerUniversity FilesNo ratings yet
- Election Law CasesDocument155 pagesElection Law CasesJa VillaromanNo ratings yet
- Ansi Asa S3.1 1999 R2008Document27 pagesAnsi Asa S3.1 1999 R2008fco2312100% (1)
- Al Qudra LakeDocument2 pagesAl Qudra Lakeواجد چوھدریNo ratings yet
- Argumentative EssayDocument16 pagesArgumentative Essaymeki ustadNo ratings yet
- Chemmatters Oct2015 Food ColoringsDocument3 pagesChemmatters Oct2015 Food Coloringsbus9No ratings yet
- Source TransformationDocument5 pagesSource Transformationraovinayakm2No ratings yet
- DLL Artsg7 Week1 2Document6 pagesDLL Artsg7 Week1 2Mae CaramancionNo ratings yet
- Quick Charge Device ListDocument16 pagesQuick Charge Device Listlimited0% (1)
- Srinivasa RamanujanDocument17 pagesSrinivasa RamanujanNeelkamal RongaliNo ratings yet
- Counterfeit and Fraudulent Items - Mitigating The Increasing Risk - Rev1 of 1019163Document128 pagesCounterfeit and Fraudulent Items - Mitigating The Increasing Risk - Rev1 of 1019163diNo ratings yet
- MAN Diesel: Tools For Reconditioning 52001-02Document4 pagesMAN Diesel: Tools For Reconditioning 52001-02manuel canas nunezNo ratings yet
- Love of Radhe-KrishnaDocument3 pagesLove of Radhe-KrishnaavncntnNo ratings yet
- World Religions Exam Review 2024Document3 pagesWorld Religions Exam Review 2024Marina SolakaNo ratings yet
- Flame ArresterDocument2 pagesFlame ArresterNicholas RiveraNo ratings yet
- Method Statement For Marble Flooring and Marble Wall CladdingDocument10 pagesMethod Statement For Marble Flooring and Marble Wall Claddingumit100% (1)
- PERDEV 3rd Summative TestDocument2 pagesPERDEV 3rd Summative TestPrincess Maiva ValleNo ratings yet
- On The Roll With The Environment: June 7, 20213 Min ReadDocument3 pagesOn The Roll With The Environment: June 7, 20213 Min Readkyzel colNo ratings yet
- Progress 2 - POD Emergency TeamDocument65 pagesProgress 2 - POD Emergency TeamGh4n113 IdNo ratings yet
- Chapter One The Problem and Its Setting 1.1 Background of The StudyDocument10 pagesChapter One The Problem and Its Setting 1.1 Background of The StudyJholo BuctonNo ratings yet