Download as pdf or txt
You might also like
- HKN-90 Service ManualDocument74 pagesHKN-90 Service Manualousmane82% (11)
- Switching Power Supply Design: A Concise Practical HandbookFrom EverandSwitching Power Supply Design: A Concise Practical HandbookNo ratings yet
- Sol 2Document21 pagesSol 2Candice Xie100% (3)
- An Overview of High Voltage Direct Current Transmission SystemDocument24 pagesAn Overview of High Voltage Direct Current Transmission SystemEmir Durmic100% (1)
- EE5518 VLSI Digital Circuit Design VLSI Digital Circuit DesignDocument39 pagesEE5518 VLSI Digital Circuit Design VLSI Digital Circuit DesignBharat Kumar100% (1)
- lecture3a_article_BeamerDocument20 pageslecture3a_article_BeamerMuhammad umer FarooqNo ratings yet
- Dynamic Logic CircuitsDocument38 pagesDynamic Logic Circuitssreekanthreddy peramNo ratings yet
- Lecturenote3 MosfetchapterDocument48 pagesLecturenote3 MosfetchapterBayron Eduardo CentenoNo ratings yet
- E104 - Superposition Theorem and LinearityDocument19 pagesE104 - Superposition Theorem and LinearityRick AlvientoNo ratings yet
- SW2_7Document6 pagesSW2_7nowshadsalman6No ratings yet
- Topics Covered On Last Class:: Ohmmeter Ohm's Law EnergyDocument42 pagesTopics Covered On Last Class:: Ohmmeter Ohm's Law EnergyFariha ShahrinNo ratings yet
- STatcom in IEEE 14 Bus System PDFDocument6 pagesSTatcom in IEEE 14 Bus System PDFSwechhya kafleNo ratings yet
- Chapter 2 PDFDocument31 pagesChapter 2 PDFAiffah MohammedNo ratings yet
- KCL Example: K V V K V K VDocument6 pagesKCL Example: K V V K V K VRafael CossNo ratings yet
- Modelling and Simulation of Power Electronic Converter Dominated Power Systems in PowerFactory-45-74Document30 pagesModelling and Simulation of Power Electronic Converter Dominated Power Systems in PowerFactory-45-74Daniel ManjarresNo ratings yet
- Analog CircuitsDocument18 pagesAnalog CircuitsSAMIT KARMAKARNo ratings yet
- 16 DC Baising FETDocument27 pages16 DC Baising FETAbella HalzinasheinNo ratings yet
- 12 Pulse ConverterDocument5 pages12 Pulse ConvertersumitchintuNo ratings yet
- Power System Dynamics and StabilityDocument52 pagesPower System Dynamics and StabilityJeziel JuárezNo ratings yet
- Power SupplyDocument28 pagesPower SupplyVIKRAM BHASKARNo ratings yet
- Workbook Workbook Workbook Workbook Workbook: Try Yourself QuestionsDocument25 pagesWorkbook Workbook Workbook Workbook Workbook: Try Yourself QuestionsHariPonnanaNo ratings yet
- Research On Dynamic Model and DecouplingDocument4 pagesResearch On Dynamic Model and DecouplingFelix GamarraNo ratings yet
- Chapter8 Symmetrical ComponentsDocument41 pagesChapter8 Symmetrical ComponentsCuong NguyenNo ratings yet
- Mosfet Scs Model MOSFET AmplifierDocument32 pagesMosfet Scs Model MOSFET AmplifierJ'Kevin Castillo PNo ratings yet
- Chapter1 4 - Amplifier MOSFETDocument90 pagesChapter1 4 - Amplifier MOSFETNguyễn Thanh Tuấn KiệtNo ratings yet
- Complex Power, Reactive Compensation, Three PhaseDocument31 pagesComplex Power, Reactive Compensation, Three Phaseahmah2009No ratings yet
- Functions of A PSSDocument50 pagesFunctions of A PSSB๖๐๐๓๓๑๙ชินกฤต ระวาดชิตNo ratings yet
- Warsaw RectifierDocument13 pagesWarsaw Rectifiermariusz sNo ratings yet
- ECE4762007 Lect12Document42 pagesECE4762007 Lect12Salvador JovenNo ratings yet
- Mosfet (Iii) - I-V CharacteristicsDocument11 pagesMosfet (Iii) - I-V Characteristics許博凱No ratings yet
- Week 3 Ch15 NotesDocument18 pagesWeek 3 Ch15 NotesDesan ScientistNo ratings yet
- Homework SolutionsDocument46 pagesHomework SolutionsKashif AmjadNo ratings yet
- Power Flow Analysis PDFDocument33 pagesPower Flow Analysis PDFAwal SaktiNo ratings yet
- EIEN307 ch2Document54 pagesEIEN307 ch2Munkhsukh100% (1)
- Lecturer On Mos InverterDocument24 pagesLecturer On Mos InvertersoumikbhNo ratings yet
- Diode Circuit Analysis: - Goal: Find Quiescent Operating Point (Q-Point) of The Diode (,) - Analytical ToolsDocument13 pagesDiode Circuit Analysis: - Goal: Find Quiescent Operating Point (Q-Point) of The Diode (,) - Analytical Toolssanjayb1976No ratings yet
- EE-612: Mosfet Iv: Part 1: Electrical and Computer Engineering Purdue University West Lafayette, IN USA Fall 2008Document33 pagesEE-612: Mosfet Iv: Part 1: Electrical and Computer Engineering Purdue University West Lafayette, IN USA Fall 2008Nava KrishnanNo ratings yet
- EE42 100 Wb-Lecture16 073113-FDocument42 pagesEE42 100 Wb-Lecture16 073113-FozanistzNo ratings yet
- MOSFET Current Mirror PDFDocument27 pagesMOSFET Current Mirror PDFaliNo ratings yet
- SpaceVector PWM InverterDocument35 pagesSpaceVector PWM Invertersolomong50% (2)
- Report Testing DC Power SupplyDocument3 pagesReport Testing DC Power SupplyNailul FalahNo ratings yet
- FET2Document49 pagesFET2mmmm1oooo90No ratings yet
- Decoupling Control of D and Q CurrentDocument11 pagesDecoupling Control of D and Q CurrentnandarathanaNo ratings yet
- Application of Distributed Static SeriesDocument8 pagesApplication of Distributed Static SeriesAkhilesh NimjeNo ratings yet
- CCDC 2010 5498813Document6 pagesCCDC 2010 5498813rajareddy235No ratings yet
- Lecture 11Document39 pagesLecture 11HossamKamalNo ratings yet
- Solutions For Exam1Document6 pagesSolutions For Exam1TSway100% (1)
- EcadDocument5 pagesEcadAira Lyn Herrera LunaNo ratings yet
- EE42 100 Wb-Lecture17 080213-FDocument35 pagesEE42 100 Wb-Lecture17 080213-FozanistzNo ratings yet
- EECE2412 Final Exam: With SolutionsDocument15 pagesEECE2412 Final Exam: With Solutionsአንድነት togetherNo ratings yet
- Solutions Manual To Accompany Electric Mach Power System Fundamentals 1st Edition 9780072291353Document38 pagesSolutions Manual To Accompany Electric Mach Power System Fundamentals 1st Edition 9780072291353buddhaunkardly2s100% (19)
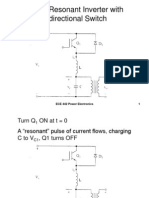
- Series Resonant Inverter With Bidirectional Switch: ECE 442 Power Electronics 1Document27 pagesSeries Resonant Inverter With Bidirectional Switch: ECE 442 Power Electronics 1mrboyedNo ratings yet
- Pspice MOSFETDocument13 pagesPspice MOSFETHiba TouneNo ratings yet
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsFrom EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Handbook of Power Systems Engineering with Power Electronics ApplicationsFrom EverandHandbook of Power Systems Engineering with Power Electronics ApplicationsNo ratings yet
- High Voltage Direct Current Transmission: Converters, Systems and DC GridsFrom EverandHigh Voltage Direct Current Transmission: Converters, Systems and DC GridsNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Em 2005Document8 pagesEm 2005Thiện HàNo ratings yet
- Detection and Prediction of Faults in Photovoltaic Arrays: A ReviewDocument9 pagesDetection and Prediction of Faults in Photovoltaic Arrays: A ReviewThiện HàNo ratings yet
- Sustainability 14 13815Document28 pagesSustainability 14 13815Thiện HàNo ratings yet
- Synchronous-Frame Decoupling Currentregulators For Induction Motor Control in Highpower Drive SystemsDocument11 pagesSynchronous-Frame Decoupling Currentregulators For Induction Motor Control in Highpower Drive SystemsThiện HàNo ratings yet
- IEA Wind TCP Annual Report 2022 ExecutiveSummaryDocument29 pagesIEA Wind TCP Annual Report 2022 ExecutiveSummaryThiện Hà100% (1)
- 100 HF Brochure NDocument2 pages100 HF Brochure NSreejith SwaminathanNo ratings yet
- Power Generation Wiring Harness Repair Kit 3164975Document6 pagesPower Generation Wiring Harness Repair Kit 3164975Sugeng Ariyadi100% (1)
- DS1720 01Document19 pagesDS1720 01Robert SeredenkoNo ratings yet
- 2 2 1 1 2 4 Katalog-Z-Vvn-Rozv-8dn9-Gis-En 2000001263234Document18 pages2 2 1 1 2 4 Katalog-Z-Vvn-Rozv-8dn9-Gis-En 2000001263234Dante FilhoNo ratings yet
- Chapter 03 - OM-FR-CT005-BE-2251-50-2001-01-CDocument87 pagesChapter 03 - OM-FR-CT005-BE-2251-50-2001-01-CRonaldo LamarhNo ratings yet
- Brilliance: BR 6 NUHR/10/16/16 Power and BR-C ConfigurationsDocument124 pagesBrilliance: BR 6 NUHR/10/16/16 Power and BR-C ConfigurationsdanielNo ratings yet
- Mts SensorsDocument6 pagesMts SensorsAmi ne-FNo ratings yet
- SIMOVERT MASTERDRIVES VC Compact PLUSDocument20 pagesSIMOVERT MASTERDRIVES VC Compact PLUSSaanounNo ratings yet
- Clarion DVH940 5.1 Surround Decoder Owners ManualDocument16 pagesClarion DVH940 5.1 Surround Decoder Owners ManualmaxNo ratings yet
- Power Monitoring in Hybrid Power System With Fault DetectionDocument6 pagesPower Monitoring in Hybrid Power System With Fault DetectionIJRASETPublicationsNo ratings yet
- AC VTI Table 6 Event Codes - Rev2Document12 pagesAC VTI Table 6 Event Codes - Rev2Francisco Tello MonteroNo ratings yet
- Auto 202 Module 1Document21 pagesAuto 202 Module 1Khent LocanilaoNo ratings yet
- Sony Klv-32v400a CH Eg1l-GaDocument112 pagesSony Klv-32v400a CH Eg1l-GaVenkatesan NatarajanNo ratings yet
- Vqts II Competence Matrix Electrician enDocument16 pagesVqts II Competence Matrix Electrician enBun LongNo ratings yet
- Service Manual: Hcd-Cpz1Document80 pagesService Manual: Hcd-Cpz1boroda2410No ratings yet
- Rules For Drawing Bode DiagramsDocument2 pagesRules For Drawing Bode DiagramsMobile SunNo ratings yet
- P141 CortecDocument6 pagesP141 CortecĐỗ Xuân BằngNo ratings yet
- S Chematic Diagrams: - Power Schematic DiagramDocument9 pagesS Chematic Diagrams: - Power Schematic Diagramkarol1301No ratings yet
- Design and Construction of An Automatic Power Conversion and Changeover SwitchDocument30 pagesDesign and Construction of An Automatic Power Conversion and Changeover SwitchIsaac KimaruNo ratings yet
- BEEE Unit 1.1Document17 pagesBEEE Unit 1.1senthil kumar rasappanNo ratings yet
- Ac & DC Uninterruptible Power Supply Systems and D.C. Back-Up Power Supply SystemsDocument31 pagesAc & DC Uninterruptible Power Supply Systems and D.C. Back-Up Power Supply SystemsKthiri WaelNo ratings yet
- Panasonic KX-T2375MXW Service ManualDocument39 pagesPanasonic KX-T2375MXW Service Manualnifiyeb189No ratings yet
- 15 Arduino Uno Breadboard Projects PDFDocument20 pages15 Arduino Uno Breadboard Projects PDFmohamed TohamyNo ratings yet
- AF1450S Subsonic Wind Tunnel DatasheetDocument7 pagesAF1450S Subsonic Wind Tunnel DatasheetAngel David Chablé RamírezNo ratings yet
- CO2037 - L03a - FETDocument27 pagesCO2037 - L03a - FETHào NguyễnNo ratings yet
- Board Design Guidelines 2003 Rev-ADocument53 pagesBoard Design Guidelines 2003 Rev-Agre_test_takerNo ratings yet
- Brief Introduction of The Product Features of DHD Series Defrost TimerDocument4 pagesBrief Introduction of The Product Features of DHD Series Defrost TimerRandall ChinchillaNo ratings yet
- Different Types of Electrical Diagrams and DrawingDocument10 pagesDifferent Types of Electrical Diagrams and DrawingYhan Brotamonte BoneoNo ratings yet
- INSTRUMENSERVIS SAS. FLS M9 FLOW MONITOR (BATERY) - ManualDocument24 pagesINSTRUMENSERVIS SAS. FLS M9 FLOW MONITOR (BATERY) - ManualFabianAndresCuervoCuervoNo ratings yet