Download as pdf or txt
You might also like
- PSK Lab ManualDocument4 pagesPSK Lab ManualSakshi DewadeNo ratings yet
- Wireless Cellular and LTE 4G BroadbandDocument26 pagesWireless Cellular and LTE 4G BroadbandSona Bhat100% (5)
- Passive Coherent Locator Applications: Public ReleaseDocument16 pagesPassive Coherent Locator Applications: Public ReleaseUmer SheikhNo ratings yet
- SFN DVB T N DVB t2Document8 pagesSFN DVB T N DVB t2teknis_10No ratings yet
- A Wireless Channel Sounding System For Rapid Propagation MeasurementsDocument6 pagesA Wireless Channel Sounding System For Rapid Propagation MeasurementsGabriel SantosNo ratings yet
- Chapter - 2 Literature Review and Theoretical BackgroundDocument12 pagesChapter - 2 Literature Review and Theoretical BackgroundTeferi LemmaNo ratings yet
- Fujitsu RDSDocument12 pagesFujitsu RDSMarcos SalasNo ratings yet
- Performance Analysis of Efficient and Low Complexity MIMO-OFDM Using STBC and V-BLASTDocument66 pagesPerformance Analysis of Efficient and Low Complexity MIMO-OFDM Using STBC and V-BLASTDheeksha ReddyNo ratings yet
- Field Trial ResuField Trial Results of 4-Way Receive Diversity in A Live GSM Networklts of 4-Way Receive Diversity in A Live GSM NetworkDocument5 pagesField Trial ResuField Trial Results of 4-Way Receive Diversity in A Live GSM Networklts of 4-Way Receive Diversity in A Live GSM NetworkFrancisco Jara PinoNo ratings yet
- W-Band MIMO FMCW Radar System With Simultaneous Transmission of Orthogonal Waveforms For High-Resolution ImagingDocument14 pagesW-Band MIMO FMCW Radar System With Simultaneous Transmission of Orthogonal Waveforms For High-Resolution ImagingAitormenta17No ratings yet
- Technical Bases For T-Dab Services Network Planning and Compatibility With Existing Broadcasting ServicesDocument200 pagesTechnical Bases For T-Dab Services Network Planning and Compatibility With Existing Broadcasting Servicesbatto1No ratings yet
- Performance and Coverage Area of Digital Terrestrial T ReditDocument4 pagesPerformance and Coverage Area of Digital Terrestrial T ReditTeferi LemmaNo ratings yet
- Design Study For UAV-Mounted GPRDocument5 pagesDesign Study For UAV-Mounted GPRعبدالباسط البشةNo ratings yet
- Compact Internal Antenna For Handheld Devices With Comprehensive DTV Band CoverageDocument10 pagesCompact Internal Antenna For Handheld Devices With Comprehensive DTV Band CoverageRadhika SethuNo ratings yet
- Advanced Topics in MIMO-OFDM SystemsDocument7 pagesAdvanced Topics in MIMO-OFDM SystemsThành PhạmNo ratings yet
- Wimax TrainingDocument48 pagesWimax TrainingRahul GuptaNo ratings yet
- Satellite Link Margin Prediction and Performance of ASTRO MalaysiaDocument5 pagesSatellite Link Margin Prediction and Performance of ASTRO MalaysiasyifakhairiNo ratings yet
- Coverage Optimization and Power Reduction in SFN Using Simulated AnnealingDocument12 pagesCoverage Optimization and Power Reduction in SFN Using Simulated AnnealingHernans De La TorreNo ratings yet
- A 3D Ray LunchingDocument14 pagesA 3D Ray LunchingdicasmoNo ratings yet
- Digital Radio SystemDocument24 pagesDigital Radio SystemJayesh SinghalNo ratings yet
- JPR Satcom-Unit 4 NotesDocument33 pagesJPR Satcom-Unit 4 NotesDanushri BalamuruganNo ratings yet
- 252 - A - Distributed - FMCW - Radar - System - Based - On - Fiber-Optic - Links - For - Small - Drone - DetectionDocument8 pages252 - A - Distributed - FMCW - Radar - System - Based - On - Fiber-Optic - Links - For - Small - Drone - DetectionA A Mahmoud YolaNo ratings yet
- Tdma, FdmaDocument26 pagesTdma, Fdmasarab1111No ratings yet
- Research of Cooperative Diversity Applied in OFDM System: Weiwei Liu, Haixin Sun, Weijie Shen, Yonghuai ZhangDocument4 pagesResearch of Cooperative Diversity Applied in OFDM System: Weiwei Liu, Haixin Sun, Weijie Shen, Yonghuai ZhangNurQaseh AmaniNo ratings yet
- 1Document5 pages1sandeshwari yadavNo ratings yet
- Idirect COTM Design Considerations - White PaperDocument9 pagesIdirect COTM Design Considerations - White Paperkira019No ratings yet
- Massive MIMO For High-Capacity Mobile Access: White PaperDocument3 pagesMassive MIMO For High-Capacity Mobile Access: White PaperHimanshu GondNo ratings yet
- Ultra Wideband Multiple-Input Multiple-Output RadarDocument5 pagesUltra Wideband Multiple-Input Multiple-Output RadarWai LinnkhyNo ratings yet
- 11 0403161 Chan CC PDFDocument16 pages11 0403161 Chan CC PDFFORCHENXYZNo ratings yet
- Equalization On-Channel Repeater For Terrestrial Digital Multimedia Broadcasting SystemDocument9 pagesEqualization On-Channel Repeater For Terrestrial Digital Multimedia Broadcasting SystemAnusha ManiNo ratings yet
- Ref 1Document9 pagesRef 1Jj JjNo ratings yet
- Ship Detection With DVB-T Software Defined Passive RadarDocument3 pagesShip Detection With DVB-T Software Defined Passive RadarAnonymous Pjbdf4wWNo ratings yet
- 1218 - RF Ranging Integrated Navigation Systems ENSCO Geolocation Tech PaperDocument5 pages1218 - RF Ranging Integrated Navigation Systems ENSCO Geolocation Tech PaperwanfaaNo ratings yet
- 3GPP NB-IoT Coverage Extension Using LEO SatellitesDocument5 pages3GPP NB-IoT Coverage Extension Using LEO SatelliteslucasolveigaNo ratings yet
- Unit III, SC-Multiple Access TechniquesDocument17 pagesUnit III, SC-Multiple Access Techniques20eg104461No ratings yet
- Earthquake Detection Using FM Radio SeminarDocument9 pagesEarthquake Detection Using FM Radio SeminarSaurav PandaNo ratings yet
- ImportanceDocument20 pagesImportancerp2145611No ratings yet
- Lecture 1 - Microwave SystemsDocument53 pagesLecture 1 - Microwave SystemsAbdul SuboorNo ratings yet
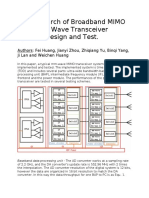
- Broadband Millimeter Wave MIMODocument5 pagesBroadband Millimeter Wave MIMOManjusha SreedharanNo ratings yet
- Implementation Aspects of RF-repeaters in Cellular Networks: October 2010Document7 pagesImplementation Aspects of RF-repeaters in Cellular Networks: October 2010Diego ZABALANo ratings yet
- FMCW Radar For Slow Moving Target Detection: Design and Performance AnalysisDocument4 pagesFMCW Radar For Slow Moving Target Detection: Design and Performance AnalysisaqsaehsanNo ratings yet
- Evaluation of A High Accuracy Range Detection Algorithm For FMCW/Phase Radar SystemsDocument5 pagesEvaluation of A High Accuracy Range Detection Algorithm For FMCW/Phase Radar SystemsFatima SheikhNo ratings yet
- IDirect Glossary of Satscellite Terms 012013Document11 pagesIDirect Glossary of Satscellite Terms 012013Damon SalvatoreNo ratings yet
- PresentationDocument12 pagesPresentationTeferi LemmaNo ratings yet
- Unit 4 Satellite AccessDocument23 pagesUnit 4 Satellite AccessSoundararajan RajagopalanNo ratings yet
- Preliminary Results of Channel Characterization at 700MHz Band in Urban and Rural RegionsDocument5 pagesPreliminary Results of Channel Characterization at 700MHz Band in Urban and Rural RegionsSHAHID ALINo ratings yet
- A Low-Cost High-Performance Digital Radar Test BedDocument9 pagesA Low-Cost High-Performance Digital Radar Test BedWesley ChenNo ratings yet
- WCC Module-4 NotesDocument22 pagesWCC Module-4 NotesUday Kumar DNo ratings yet
- Scalability of DVB-H Deployment On Existing Wireless InfrastructureDocument5 pagesScalability of DVB-H Deployment On Existing Wireless InfrastructureMark ChungNo ratings yet
- Dual-Polarization DVB-T Passive Radar: Experimental Results: M. Conti, C. Moscardini, A. CapriaDocument5 pagesDual-Polarization DVB-T Passive Radar: Experimental Results: M. Conti, C. Moscardini, A. CapriaBernard AndrysNo ratings yet
- Photonic RadarDocument5 pagesPhotonic RadarHariNathNo ratings yet
- Starlink StructureDocument14 pagesStarlink Structurestephanus andyNo ratings yet
- cs2402 2 Marks Question Bank-With AnswerDocument26 pagescs2402 2 Marks Question Bank-With AnswerFrousper29No ratings yet
- Research On Smart AntennaDocument3 pagesResearch On Smart AntennaVictoryback BackNo ratings yet
- Module 1Document26 pagesModule 1Varshini NNo ratings yet
- Starlink StructureDocument14 pagesStarlink StructureZoran ConstantinescuNo ratings yet
- 2004 Acoustic RangingDocument7 pages2004 Acoustic RangingMarcos Gabriel JudewiczNo ratings yet
- Progress in Electromagnetics Research, PIER 49, 203-218, 2004Document16 pagesProgress in Electromagnetics Research, PIER 49, 203-218, 2004sitaram_1No ratings yet
- Bernard Le Floch, Jean-Christophe Rault, Pierre Siohan, Rodolphe Legouable, Christian Gallard France Telecom - Orange Labs, Rue Du Clos Courtel, 35512 Cesson-Sévigné Cedex, FranceDocument6 pagesBernard Le Floch, Jean-Christophe Rault, Pierre Siohan, Rodolphe Legouable, Christian Gallard France Telecom - Orange Labs, Rue Du Clos Courtel, 35512 Cesson-Sévigné Cedex, FrancepraneethNo ratings yet
- DraftDocument7 pagesDraftmakhzom alshhumiNo ratings yet
- WCDMA Principle: Huawei Northwest Africa Region RNP Solution Manage: William - ChenDocument31 pagesWCDMA Principle: Huawei Northwest Africa Region RNP Solution Manage: William - ChenSABER1980No ratings yet
- X Band Repeater BTECH MobileDocument4 pagesX Band Repeater BTECH MobileMohamad HarithNo ratings yet
- Explorer 940 Compact Digital-Only Interactive Set-Top: DescriptionDocument4 pagesExplorer 940 Compact Digital-Only Interactive Set-Top: DescriptionFlor Vegas VoirolNo ratings yet
- Peralatan PemancarDocument23 pagesPeralatan PemancarGhufranaka Aldrien NanangNo ratings yet
- TSEL LTE OMC Guideline - V18 - December8Document46 pagesTSEL LTE OMC Guideline - V18 - December8Leonard Meizak TuheteruNo ratings yet
- TV AOC - L32w781a - LCD - TV PDFDocument124 pagesTV AOC - L32w781a - LCD - TV PDFCalin SilviuNo ratings yet
- Kenwood NXDN-MotoTRBO-ICOM iDAS Digital Repeater Spec Comparison ChartDocument1 pageKenwood NXDN-MotoTRBO-ICOM iDAS Digital Repeater Spec Comparison ChartSparky01100% (2)
- WDC Question Bank 2018Document8 pagesWDC Question Bank 2018Aadharsh HariharanNo ratings yet
- PSKDocument6 pagesPSKPan De LaNo ratings yet
- Cellular Concept: Wireless CommunicationsDocument34 pagesCellular Concept: Wireless CommunicationsYounis FadlNo ratings yet
- 9 Cable Cascadable SwitcherDocument7 pages9 Cable Cascadable SwitcherTarek MatarNo ratings yet
- Ultra-Wideband Microstrip Array Antenna For 5G Millimeter-Wave ApplicationsDocument7 pagesUltra-Wideband Microstrip Array Antenna For 5G Millimeter-Wave Applicationsfatima gourariNo ratings yet
- LTE Layer 1Document5 pagesLTE Layer 1NilayNo ratings yet
- Multi-Channel Multipoint Distribution Service (MMDS)Document19 pagesMulti-Channel Multipoint Distribution Service (MMDS)Rahul SinghalNo ratings yet
- March 1996 ECE Board Exam - CommunicationsDocument3 pagesMarch 1996 ECE Board Exam - CommunicationsMarkceej BaliNo ratings yet
- 2.1.2 Understand Evolution of Mobile Communication Systems - 1G, 2G, 2.5G, 3G and 4GDocument3 pages2.1.2 Understand Evolution of Mobile Communication Systems - 1G, 2G, 2.5G, 3G and 4GAbhishek AbhiNo ratings yet
- Apxvf13 C A20Document2 pagesApxvf13 C A20Martín Córdoba GetarNo ratings yet
- 3 h70 - CoverDocument12 pages3 h70 - CoverCharbel RahmeNo ratings yet
- NDR Jammer OverviewDocument1 pageNDR Jammer OverviewhardedcNo ratings yet
- 2014 Multi-User MIMO in LTEDocument6 pages2014 Multi-User MIMO in LTEsowNo ratings yet
- Design of Planar Inverted-F Antennas (PIFA) For Multiband Wireless ApplicationsDocument4 pagesDesign of Planar Inverted-F Antennas (PIFA) For Multiband Wireless ApplicationsMarco FalzoneNo ratings yet
- 6 VSB PDFDocument5 pages6 VSB PDFi1019117No ratings yet
- ECE Powerpoint PresentationDocument130 pagesECE Powerpoint PresentationLalith KumarNo ratings yet
- Digital Communication SyllabusDocument4 pagesDigital Communication Syllabusnimish kambleNo ratings yet
- Satelit TVDocument33 pagesSatelit TVnurikatanjungNo ratings yet
- Cre-8900 Block DiagramDocument1 pageCre-8900 Block DiagramHuMoVaNo ratings yet
- 7653 7654 Spec Rev BDocument2 pages7653 7654 Spec Rev BPATRIOTSKULLZNo ratings yet
- 7678329Document8 pages7678329jraz141No ratings yet