
Magnetometer Data Processing Using Oasis Montaj Crash Course
Magnetometer Data Processing Using Oasis Montaj Crash Course
You might also like
- Scada SRSDocument11 pagesScada SRSRana WaqasNo ratings yet
- Inno PresentationDocument6 pagesInno PresentationAmisha Aliena60% (5)
- Top 27 SAP BASIS Interview Questions and Answers For IBMDocument4 pagesTop 27 SAP BASIS Interview Questions and Answers For IBMsai_balaji_8No ratings yet
- EMP Generator SchematicDocument6 pagesEMP Generator SchematicTC Serhan Uçar0% (1)
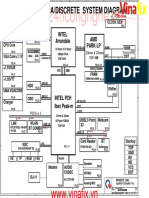
- HP g42 - Daax1jmb8c0 - IntelDocument40 pagesHP g42 - Daax1jmb8c0 - Intelredsky991100% (3)
- Introduction To Computer Science Using PythonDocument12 pagesIntroduction To Computer Science Using Pythonlol50% (4)
- Using OpNetDocument5 pagesUsing OpNetMalebogo BabutsiNo ratings yet
- LICSAR Time Series TutorialDocument10 pagesLICSAR Time Series TutorialLore Cardenas AguirreNo ratings yet
- What Is RF Drive Test (Testing) ?Document8 pagesWhat Is RF Drive Test (Testing) ?imane_fatehNo ratings yet
- LABSHEET-9 Introduction To Network Simulator (OPNET)Document18 pagesLABSHEET-9 Introduction To Network Simulator (OPNET)Ravi KishoreNo ratings yet
- E3sconf Gi2021 04001Document9 pagesE3sconf Gi2021 04001CEO DimejiNo ratings yet
- Practical SS7, Part 3Document7 pagesPractical SS7, Part 3MITHUNLALUSNo ratings yet
- HW1 SolutionDocument3 pagesHW1 Solutionryle34No ratings yet
- Introduction of 3D ScanningDocument5 pagesIntroduction of 3D Scanningfahadiii20No ratings yet
- Reducing Congestion With IC CompilerDocument9 pagesReducing Congestion With IC Compilermaharajm98100% (1)
- Answers of Booklet1-4Document33 pagesAnswers of Booklet1-4Riaz RasoolNo ratings yet
- Pipeline v1Document13 pagesPipeline v1vinilmNo ratings yet
- TEMS Investigation 16.0 Release NoteDocument6 pagesTEMS Investigation 16.0 Release NoteHassan NazirNo ratings yet
- Final ReviewDocument7 pagesFinal ReviewMonicaP18No ratings yet
- S-Gems Tutorial Notes: Hydrogeophysics: Theory, Methods, and ModelingDocument26 pagesS-Gems Tutorial Notes: Hydrogeophysics: Theory, Methods, and ModelingmarcialcolosNo ratings yet
- Exam 1, Solution: Question 1: Resources Management (30 Points)Document5 pagesExam 1, Solution: Question 1: Resources Management (30 Points)Garima MishraNo ratings yet
- Simstd Apr 2003 HintsDocument2 pagesSimstd Apr 2003 HintsGretchen BouNo ratings yet
- OPNET Modeler - Introduction LTE SimulationDocument16 pagesOPNET Modeler - Introduction LTE SimulationAnonymous TTVlXoNo ratings yet
- Comparison Corrosion Mapping Solutions Using Phased Array and Conventional UT TechniquesDocument11 pagesComparison Corrosion Mapping Solutions Using Phased Array and Conventional UT TechniquesDairo Damian MelendezNo ratings yet
- Plus-Minus Method of Refraction Seismic Data Analysis in RadExPro SoftwareDocument24 pagesPlus-Minus Method of Refraction Seismic Data Analysis in RadExPro SoftwareJ Andre Medina DiazNo ratings yet
- Technical FAQsDocument3 pagesTechnical FAQsDong Hyun KangNo ratings yet
- Articulos08 - Dispositivo de Navegación Con Tecnología IOT para Personas Con Discapacidad VisualDocument13 pagesArticulos08 - Dispositivo de Navegación Con Tecnología IOT para Personas Con Discapacidad VisualHENRY WILSON TORNERO YAYANo ratings yet
- ADS Tutorial: A Beginners Tutorial: Modes of OperationDocument13 pagesADS Tutorial: A Beginners Tutorial: Modes of OperationYounes Ait El MaatiNo ratings yet
- Networks Lab ManualDocument53 pagesNetworks Lab ManualM'atto DipnotNo ratings yet
- Chapter Three System Analysis and DesignDocument7 pagesChapter Three System Analysis and DesignOwolabi PetersNo ratings yet
- Thesis Audio HimaliaDocument5 pagesThesis Audio HimaliaPaperWritersMobile100% (2)
- How To Set Up An OSRM Server On Ubuntu 14.04Document10 pagesHow To Set Up An OSRM Server On Ubuntu 14.04Rakesh BhardwajNo ratings yet
- What To DoDocument21 pagesWhat To DoJanviNo ratings yet
- Gulf Est UserManualDocument19 pagesGulf Est UserManualmario5681No ratings yet
- Debugging Embedded Systems 09Document5 pagesDebugging Embedded Systems 09Sharmila DeviNo ratings yet
- CSEC I.T June 2001 AnswersDocument3 pagesCSEC I.T June 2001 AnswersRonaldo DegazonNo ratings yet
- Hunting Down CPU Related Issues With Oracle: A Functional ApproachDocument9 pagesHunting Down CPU Related Issues With Oracle: A Functional ApproachphanithotaNo ratings yet
- 0420-NOS As AnswersDocument33 pages0420-NOS As AnswersTebello RatauNo ratings yet
- 5.1.5 - 4932 Lab - Tracing A Route - ILMDocument5 pages5.1.5 - 4932 Lab - Tracing A Route - ILMHendriNo ratings yet
- Mentum Planet 5 (1) .0 LTE MP502Document31 pagesMentum Planet 5 (1) .0 LTE MP502Yousuf ShaikhNo ratings yet
- FHWA Office of Operations - Section 3.0 - Base Model DevelopmentDocument22 pagesFHWA Office of Operations - Section 3.0 - Base Model DevelopmentLuis Carlos Caicedo BarreraNo ratings yet
- Getting Full Speed With DelphiDocument25 pagesGetting Full Speed With DelphiDavis MontenegroNo ratings yet
- System Which Allows The Blind Victims To Identify andDocument24 pagesSystem Which Allows The Blind Victims To Identify andAqeel AhmedNo ratings yet
- Mastering Stack and Heap For System ReliabilityDocument10 pagesMastering Stack and Heap For System Reliabilitystu807No ratings yet
- Splitlab TheUserGuideDocument21 pagesSplitlab TheUserGuideapi-3761293No ratings yet
- Lab 10 Introduction To GNS3 and Static RoutingDocument18 pagesLab 10 Introduction To GNS3 and Static RoutingShahzad HussainNo ratings yet
- Lab 10 Introduction To GNS3 and Static RoutingDocument18 pagesLab 10 Introduction To GNS3 and Static RoutingShahzad HussainNo ratings yet
- Automated Weather Model Processing With FOSS4G: Lessons Learned - by Thomas Horner - The Startup - MediumDocument27 pagesAutomated Weather Model Processing With FOSS4G: Lessons Learned - by Thomas Horner - The Startup - MediumJackson GrazianoNo ratings yet
- SAS Programming Guidelines Interview Questions You'll Most Likely Be AskedDocument24 pagesSAS Programming Guidelines Interview Questions You'll Most Likely Be AskedVibrant PublishersNo ratings yet
- Xmos - Getting Started With ExamplesDocument24 pagesXmos - Getting Started With ExamplesDeepak123No ratings yet
- Vibration Thesis Matlab CodeDocument6 pagesVibration Thesis Matlab Codemmwsmltgg100% (2)
- Using The Trimble Geoexplorers For Sub-Meter AccuracyDocument4 pagesUsing The Trimble Geoexplorers For Sub-Meter AccuracyhorapeNo ratings yet
- Quick Start Lotos 12Document15 pagesQuick Start Lotos 12Nurlia AduNo ratings yet
- DSA Using C - Quick GuideDocument71 pagesDSA Using C - Quick GuideAfroz Alam Ki VinesNo ratings yet
- 5.1.5 Lab - Tracing A RouteDocument4 pages5.1.5 Lab - Tracing A Routeducan1724No ratings yet
- 5.1.5 Lab - Tracing A RouteDocument4 pages5.1.5 Lab - Tracing A RouteBroe MelloNo ratings yet
- Gps Tools Guide NetDocument22 pagesGps Tools Guide NetVilciu ConstantinNo ratings yet
- Chapter 14Document26 pagesChapter 14andi_ml_bdgNo ratings yet
- Eo Learn 3Document17 pagesEo Learn 3Trung HoàngNo ratings yet
- Project Report: 4.1 To Calculate Prediction For Overlapping ZonesDocument15 pagesProject Report: 4.1 To Calculate Prediction For Overlapping ZonesPreeti BudhirajaNo ratings yet
- SAS Programming Guidelines Interview Questions You'll Most Likely Be AskedFrom EverandSAS Programming Guidelines Interview Questions You'll Most Likely Be AskedNo ratings yet
- Design and Test Strategies for 2D/3D Integration for NoC-based Multicore ArchitecturesFrom EverandDesign and Test Strategies for 2D/3D Integration for NoC-based Multicore ArchitecturesNo ratings yet
- CST USEN 17373332 MealBuilder Veg PDFDocument1 pageCST USEN 17373332 MealBuilder Veg PDFTC Serhan UçarNo ratings yet
- CST USEN 17569744 PRJ Snack 25 Healthy Snacks SBDocument2 pagesCST USEN 17569744 PRJ Snack 25 Healthy Snacks SBTC Serhan UçarNo ratings yet
- AMAS 06.02 Battle Area ClearanceDocument7 pagesAMAS 06.02 Battle Area ClearanceTC Serhan UçarNo ratings yet
- Circuitchef 7400 Tic Tac ToeDocument5 pagesCircuitchef 7400 Tic Tac ToeTC Serhan Uçar0% (1)
- To Days PilotDocument1 pageTo Days PilotTC Serhan UçarNo ratings yet
- WoodRidge D16704 - 0408Document106 pagesWoodRidge D16704 - 0408John HallowsNo ratings yet
- Automatic Generation of JIT Compilers For Dynamic Languages ForDocument25 pagesAutomatic Generation of JIT Compilers For Dynamic Languages Forrajjer13No ratings yet
- Resume SampleDocument4 pagesResume SamplePiyush ChandraNo ratings yet
- Forms - : An Overview of Oracle Form Builder v.6.0Document35 pagesForms - : An Overview of Oracle Form Builder v.6.0jlp7490No ratings yet
- 15 InstallDocument128 pages15 InstallhaianhletiNo ratings yet
- UntitledDocument22 pagesUntitledKeshava AyaruNo ratings yet
- Transistor DC Biasing 1Document38 pagesTransistor DC Biasing 1farhan jalaludinNo ratings yet
- Temperature SensorDocument10 pagesTemperature SensorMaulik KotechaNo ratings yet
- SC-900: Microsoft Security, Compliance, and Identity Fundamentals Sample QuestionsDocument21 pagesSC-900: Microsoft Security, Compliance, and Identity Fundamentals Sample QuestionsHicham MANNASSNo ratings yet
- FD70CV VDocument16 pagesFD70CV Vjosue jetavionicsNo ratings yet
- CM304Document18 pagesCM304api-3849444No ratings yet
- CSC 326 ManualDocument10 pagesCSC 326 ManualRamesh BurhadeNo ratings yet
- Lecture 14: Multi-Client TCP Servers Objectives:: Connection Acceptor Connection HandlerDocument7 pagesLecture 14: Multi-Client TCP Servers Objectives:: Connection Acceptor Connection HandlerRaheeb ALNadifeNo ratings yet
- Oracle Backup Recovery Student GuideDocument125 pagesOracle Backup Recovery Student Guideradhashyam naakNo ratings yet
- IoT - 2022Document48 pagesIoT - 2022Jiru MuletaNo ratings yet
- Chapter 4. Computer SoftwareDocument40 pagesChapter 4. Computer SoftwareAhmadNo ratings yet
- Nvis 6106Document1 pageNvis 6106Mohammd EssaNo ratings yet
- General Isolation and Gate Drivers Overview UpdatedDocument77 pagesGeneral Isolation and Gate Drivers Overview UpdatedDebayan DuttaNo ratings yet
- In-Lab Work: Department of Electrical and Computer Engineering ECE 2262 - Electric CircuitsDocument4 pagesIn-Lab Work: Department of Electrical and Computer Engineering ECE 2262 - Electric CircuitsThiago Araújo de AssisNo ratings yet
- Rfid Based Voting MachineDocument91 pagesRfid Based Voting MachineRakesh kumar100% (1)
- Exadata Database Machine 12c Administration Workshop Ed 2Document7 pagesExadata Database Machine 12c Administration Workshop Ed 2saroj sahooNo ratings yet
- 8-Cloth Store Management SystemDocument10 pages8-Cloth Store Management SystembittuwarvadeNo ratings yet
- Configure CUCM Smart Call HomeDocument6 pagesConfigure CUCM Smart Call HomeŞerif ŞahinNo ratings yet
- Error DBDocument4 pagesError DBHayathullah AhmedNo ratings yet
- 12 C AdminDocument73 pages12 C AdminSurapong Naowasate0% (1)
- 01 Crash CourseDocument23 pages01 Crash CourseahmetakdoganNo ratings yet































































































Download as pdf or txt
You might also like
- Scada SRSDocument11 pagesScada SRSRana WaqasNo ratings yet
- Inno PresentationDocument6 pagesInno PresentationAmisha Aliena60% (5)
- Top 27 SAP BASIS Interview Questions and Answers For IBMDocument4 pagesTop 27 SAP BASIS Interview Questions and Answers For IBMsai_balaji_8No ratings yet
- EMP Generator SchematicDocument6 pagesEMP Generator SchematicTC Serhan Uçar0% (1)
- HP g42 - Daax1jmb8c0 - IntelDocument40 pagesHP g42 - Daax1jmb8c0 - Intelredsky991100% (3)
- Introduction To Computer Science Using PythonDocument12 pagesIntroduction To Computer Science Using Pythonlol50% (4)
- Using OpNetDocument5 pagesUsing OpNetMalebogo BabutsiNo ratings yet
- LICSAR Time Series TutorialDocument10 pagesLICSAR Time Series TutorialLore Cardenas AguirreNo ratings yet
- What Is RF Drive Test (Testing) ?Document8 pagesWhat Is RF Drive Test (Testing) ?imane_fatehNo ratings yet
- LABSHEET-9 Introduction To Network Simulator (OPNET)Document18 pagesLABSHEET-9 Introduction To Network Simulator (OPNET)Ravi KishoreNo ratings yet
- E3sconf Gi2021 04001Document9 pagesE3sconf Gi2021 04001CEO DimejiNo ratings yet
- Practical SS7, Part 3Document7 pagesPractical SS7, Part 3MITHUNLALUSNo ratings yet
- HW1 SolutionDocument3 pagesHW1 Solutionryle34No ratings yet
- Introduction of 3D ScanningDocument5 pagesIntroduction of 3D Scanningfahadiii20No ratings yet
- Reducing Congestion With IC CompilerDocument9 pagesReducing Congestion With IC Compilermaharajm98100% (1)
- Answers of Booklet1-4Document33 pagesAnswers of Booklet1-4Riaz RasoolNo ratings yet
- Pipeline v1Document13 pagesPipeline v1vinilmNo ratings yet
- TEMS Investigation 16.0 Release NoteDocument6 pagesTEMS Investigation 16.0 Release NoteHassan NazirNo ratings yet
- Final ReviewDocument7 pagesFinal ReviewMonicaP18No ratings yet
- S-Gems Tutorial Notes: Hydrogeophysics: Theory, Methods, and ModelingDocument26 pagesS-Gems Tutorial Notes: Hydrogeophysics: Theory, Methods, and ModelingmarcialcolosNo ratings yet
- Exam 1, Solution: Question 1: Resources Management (30 Points)Document5 pagesExam 1, Solution: Question 1: Resources Management (30 Points)Garima MishraNo ratings yet
- Simstd Apr 2003 HintsDocument2 pagesSimstd Apr 2003 HintsGretchen BouNo ratings yet
- OPNET Modeler - Introduction LTE SimulationDocument16 pagesOPNET Modeler - Introduction LTE SimulationAnonymous TTVlXoNo ratings yet
- Comparison Corrosion Mapping Solutions Using Phased Array and Conventional UT TechniquesDocument11 pagesComparison Corrosion Mapping Solutions Using Phased Array and Conventional UT TechniquesDairo Damian MelendezNo ratings yet
- Plus-Minus Method of Refraction Seismic Data Analysis in RadExPro SoftwareDocument24 pagesPlus-Minus Method of Refraction Seismic Data Analysis in RadExPro SoftwareJ Andre Medina DiazNo ratings yet
- Technical FAQsDocument3 pagesTechnical FAQsDong Hyun KangNo ratings yet
- Articulos08 - Dispositivo de Navegación Con Tecnología IOT para Personas Con Discapacidad VisualDocument13 pagesArticulos08 - Dispositivo de Navegación Con Tecnología IOT para Personas Con Discapacidad VisualHENRY WILSON TORNERO YAYANo ratings yet
- ADS Tutorial: A Beginners Tutorial: Modes of OperationDocument13 pagesADS Tutorial: A Beginners Tutorial: Modes of OperationYounes Ait El MaatiNo ratings yet
- Networks Lab ManualDocument53 pagesNetworks Lab ManualM'atto DipnotNo ratings yet
- Chapter Three System Analysis and DesignDocument7 pagesChapter Three System Analysis and DesignOwolabi PetersNo ratings yet
- Thesis Audio HimaliaDocument5 pagesThesis Audio HimaliaPaperWritersMobile100% (2)
- How To Set Up An OSRM Server On Ubuntu 14.04Document10 pagesHow To Set Up An OSRM Server On Ubuntu 14.04Rakesh BhardwajNo ratings yet
- What To DoDocument21 pagesWhat To DoJanviNo ratings yet
- Gulf Est UserManualDocument19 pagesGulf Est UserManualmario5681No ratings yet
- Debugging Embedded Systems 09Document5 pagesDebugging Embedded Systems 09Sharmila DeviNo ratings yet
- CSEC I.T June 2001 AnswersDocument3 pagesCSEC I.T June 2001 AnswersRonaldo DegazonNo ratings yet
- Hunting Down CPU Related Issues With Oracle: A Functional ApproachDocument9 pagesHunting Down CPU Related Issues With Oracle: A Functional ApproachphanithotaNo ratings yet
- 0420-NOS As AnswersDocument33 pages0420-NOS As AnswersTebello RatauNo ratings yet
- 5.1.5 - 4932 Lab - Tracing A Route - ILMDocument5 pages5.1.5 - 4932 Lab - Tracing A Route - ILMHendriNo ratings yet
- Mentum Planet 5 (1) .0 LTE MP502Document31 pagesMentum Planet 5 (1) .0 LTE MP502Yousuf ShaikhNo ratings yet
- FHWA Office of Operations - Section 3.0 - Base Model DevelopmentDocument22 pagesFHWA Office of Operations - Section 3.0 - Base Model DevelopmentLuis Carlos Caicedo BarreraNo ratings yet
- Getting Full Speed With DelphiDocument25 pagesGetting Full Speed With DelphiDavis MontenegroNo ratings yet
- System Which Allows The Blind Victims To Identify andDocument24 pagesSystem Which Allows The Blind Victims To Identify andAqeel AhmedNo ratings yet
- Mastering Stack and Heap For System ReliabilityDocument10 pagesMastering Stack and Heap For System Reliabilitystu807No ratings yet
- Splitlab TheUserGuideDocument21 pagesSplitlab TheUserGuideapi-3761293No ratings yet
- Lab 10 Introduction To GNS3 and Static RoutingDocument18 pagesLab 10 Introduction To GNS3 and Static RoutingShahzad HussainNo ratings yet
- Lab 10 Introduction To GNS3 and Static RoutingDocument18 pagesLab 10 Introduction To GNS3 and Static RoutingShahzad HussainNo ratings yet
- Automated Weather Model Processing With FOSS4G: Lessons Learned - by Thomas Horner - The Startup - MediumDocument27 pagesAutomated Weather Model Processing With FOSS4G: Lessons Learned - by Thomas Horner - The Startup - MediumJackson GrazianoNo ratings yet
- SAS Programming Guidelines Interview Questions You'll Most Likely Be AskedDocument24 pagesSAS Programming Guidelines Interview Questions You'll Most Likely Be AskedVibrant PublishersNo ratings yet
- Xmos - Getting Started With ExamplesDocument24 pagesXmos - Getting Started With ExamplesDeepak123No ratings yet
- Vibration Thesis Matlab CodeDocument6 pagesVibration Thesis Matlab Codemmwsmltgg100% (2)
- Using The Trimble Geoexplorers For Sub-Meter AccuracyDocument4 pagesUsing The Trimble Geoexplorers For Sub-Meter AccuracyhorapeNo ratings yet
- Quick Start Lotos 12Document15 pagesQuick Start Lotos 12Nurlia AduNo ratings yet
- DSA Using C - Quick GuideDocument71 pagesDSA Using C - Quick GuideAfroz Alam Ki VinesNo ratings yet
- 5.1.5 Lab - Tracing A RouteDocument4 pages5.1.5 Lab - Tracing A Routeducan1724No ratings yet
- 5.1.5 Lab - Tracing A RouteDocument4 pages5.1.5 Lab - Tracing A RouteBroe MelloNo ratings yet
- Gps Tools Guide NetDocument22 pagesGps Tools Guide NetVilciu ConstantinNo ratings yet
- Chapter 14Document26 pagesChapter 14andi_ml_bdgNo ratings yet
- Eo Learn 3Document17 pagesEo Learn 3Trung HoàngNo ratings yet
- Project Report: 4.1 To Calculate Prediction For Overlapping ZonesDocument15 pagesProject Report: 4.1 To Calculate Prediction For Overlapping ZonesPreeti BudhirajaNo ratings yet
- SAS Programming Guidelines Interview Questions You'll Most Likely Be AskedFrom EverandSAS Programming Guidelines Interview Questions You'll Most Likely Be AskedNo ratings yet
- Design and Test Strategies for 2D/3D Integration for NoC-based Multicore ArchitecturesFrom EverandDesign and Test Strategies for 2D/3D Integration for NoC-based Multicore ArchitecturesNo ratings yet
- CST USEN 17373332 MealBuilder Veg PDFDocument1 pageCST USEN 17373332 MealBuilder Veg PDFTC Serhan UçarNo ratings yet
- CST USEN 17569744 PRJ Snack 25 Healthy Snacks SBDocument2 pagesCST USEN 17569744 PRJ Snack 25 Healthy Snacks SBTC Serhan UçarNo ratings yet
- AMAS 06.02 Battle Area ClearanceDocument7 pagesAMAS 06.02 Battle Area ClearanceTC Serhan UçarNo ratings yet
- Circuitchef 7400 Tic Tac ToeDocument5 pagesCircuitchef 7400 Tic Tac ToeTC Serhan Uçar0% (1)
- To Days PilotDocument1 pageTo Days PilotTC Serhan UçarNo ratings yet
- WoodRidge D16704 - 0408Document106 pagesWoodRidge D16704 - 0408John HallowsNo ratings yet
- Automatic Generation of JIT Compilers For Dynamic Languages ForDocument25 pagesAutomatic Generation of JIT Compilers For Dynamic Languages Forrajjer13No ratings yet
- Resume SampleDocument4 pagesResume SamplePiyush ChandraNo ratings yet
- Forms - : An Overview of Oracle Form Builder v.6.0Document35 pagesForms - : An Overview of Oracle Form Builder v.6.0jlp7490No ratings yet
- 15 InstallDocument128 pages15 InstallhaianhletiNo ratings yet
- UntitledDocument22 pagesUntitledKeshava AyaruNo ratings yet
- Transistor DC Biasing 1Document38 pagesTransistor DC Biasing 1farhan jalaludinNo ratings yet
- Temperature SensorDocument10 pagesTemperature SensorMaulik KotechaNo ratings yet
- SC-900: Microsoft Security, Compliance, and Identity Fundamentals Sample QuestionsDocument21 pagesSC-900: Microsoft Security, Compliance, and Identity Fundamentals Sample QuestionsHicham MANNASSNo ratings yet
- FD70CV VDocument16 pagesFD70CV Vjosue jetavionicsNo ratings yet
- CM304Document18 pagesCM304api-3849444No ratings yet
- CSC 326 ManualDocument10 pagesCSC 326 ManualRamesh BurhadeNo ratings yet
- Lecture 14: Multi-Client TCP Servers Objectives:: Connection Acceptor Connection HandlerDocument7 pagesLecture 14: Multi-Client TCP Servers Objectives:: Connection Acceptor Connection HandlerRaheeb ALNadifeNo ratings yet
- Oracle Backup Recovery Student GuideDocument125 pagesOracle Backup Recovery Student Guideradhashyam naakNo ratings yet
- IoT - 2022Document48 pagesIoT - 2022Jiru MuletaNo ratings yet
- Chapter 4. Computer SoftwareDocument40 pagesChapter 4. Computer SoftwareAhmadNo ratings yet
- Nvis 6106Document1 pageNvis 6106Mohammd EssaNo ratings yet
- General Isolation and Gate Drivers Overview UpdatedDocument77 pagesGeneral Isolation and Gate Drivers Overview UpdatedDebayan DuttaNo ratings yet
- In-Lab Work: Department of Electrical and Computer Engineering ECE 2262 - Electric CircuitsDocument4 pagesIn-Lab Work: Department of Electrical and Computer Engineering ECE 2262 - Electric CircuitsThiago Araújo de AssisNo ratings yet
- Rfid Based Voting MachineDocument91 pagesRfid Based Voting MachineRakesh kumar100% (1)
- Exadata Database Machine 12c Administration Workshop Ed 2Document7 pagesExadata Database Machine 12c Administration Workshop Ed 2saroj sahooNo ratings yet
- 8-Cloth Store Management SystemDocument10 pages8-Cloth Store Management SystembittuwarvadeNo ratings yet
- Configure CUCM Smart Call HomeDocument6 pagesConfigure CUCM Smart Call HomeŞerif ŞahinNo ratings yet
- Error DBDocument4 pagesError DBHayathullah AhmedNo ratings yet
- 12 C AdminDocument73 pages12 C AdminSurapong Naowasate0% (1)
- 01 Crash CourseDocument23 pages01 Crash CourseahmetakdoganNo ratings yet