
02 Pipe Jacking by Auger System
02 Pipe Jacking by Auger System
You might also like
- Sop For Set Up & Operation of Concrete PumpDocument3 pagesSop For Set Up & Operation of Concrete Pumplelu ojhaNo ratings yet
- Material Handling Study Report For Removable Tube BundleDocument9 pagesMaterial Handling Study Report For Removable Tube BundleMohamed FarisNo ratings yet
- Method Statement GIS HV TestDocument28 pagesMethod Statement GIS HV Testnayagammailbox75% (4)
- Valves Installation Method StatementsDocument16 pagesValves Installation Method StatementsLungisani100% (3)
- Jms Civil Work - RGTP p20220019 Esb Con Jms 9243 0005Document12 pagesJms Civil Work - RGTP p20220019 Esb Con Jms 9243 0005amir hakimNo ratings yet
- OPSS 450 Nov12Document11 pagesOPSS 450 Nov12jkhgvdj mnhsnjkhgNo ratings yet
- Temp Fencing & GateDocument12 pagesTemp Fencing & GateMark Fash0% (1)
- Assembly and Part Drawing: Water-Cooled Diesel EngineDocument2 pagesAssembly and Part Drawing: Water-Cooled Diesel Enginenelson moralesNo ratings yet
- PP14-00-Y-CNL-SAR-004-RA ConcreteDocument91 pagesPP14-00-Y-CNL-SAR-004-RA ConcretePablo ArnaldoNo ratings yet
- CPP-NA2-PM-PLN-0015 Procedure For Hydrostatic TestingDocument18 pagesCPP-NA2-PM-PLN-0015 Procedure For Hydrostatic TestingAdil Ijaz100% (1)
- QJ148-MS-G-003 - Gwc-Rlic-Permenent Access Culvert and Road Works.Document12 pagesQJ148-MS-G-003 - Gwc-Rlic-Permenent Access Culvert and Road Works.jafar mohdNo ratings yet
- Process Industry Practices Piping: PIP PNE00003 Process Unit and Offsites Layout GuideDocument14 pagesProcess Industry Practices Piping: PIP PNE00003 Process Unit and Offsites Layout GuideSilambarasan PalanisamyNo ratings yet
- WMS Excavation & BACKFILLINGDocument28 pagesWMS Excavation & BACKFILLINGRepl microsoft, PuneNo ratings yet
- FRN MST PPL Pl1 011 p4 C c1Document18 pagesFRN MST PPL Pl1 011 p4 C c1Utku Can Kılıç100% (1)
- STS QAC SOP 006 Repair Procedure For Stainless SteelDocument4 pagesSTS QAC SOP 006 Repair Procedure For Stainless Steelmohd as shahiddin jafriNo ratings yet
- Technical Specification For Level Control ValvesDocument13 pagesTechnical Specification For Level Control ValvesAylaNo ratings yet
- Method Statement - BackfillDocument8 pagesMethod Statement - BackfillJurie_sk3608100% (1)
- Epic For Upgrade of Port Control Tower and Systems at RlicDocument8 pagesEpic For Upgrade of Port Control Tower and Systems at RlicsreeNo ratings yet
- N0579-TJN-ET-MS0001 - R02 Method Statement For Grounding InstallationDocument19 pagesN0579-TJN-ET-MS0001 - R02 Method Statement For Grounding InstallationAbat SayekeyevNo ratings yet
- SEP-01-ZAA-1DC-010 - 1 - Method Statement For Earth WorksDocument11 pagesSEP-01-ZAA-1DC-010 - 1 - Method Statement For Earth WorksMike HernandezNo ratings yet
- NPDCDocument48 pagesNPDCEbby OnyekweNo ratings yet
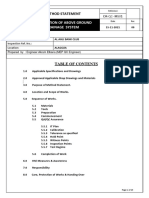
- 1.0 Method Statement Above Ground - Drainage SystemDocument19 pages1.0 Method Statement Above Ground - Drainage Systemمقاول تكييف كهرباء وصحيNo ratings yet
- SofregazDocument26 pagesSofregazAbdulkadir Berk MalkoçNo ratings yet
- 0-WD010-MZ711-10002 HSE Work Permit Procedure - Rev.1 - PDFDocument11 pages0-WD010-MZ711-10002 HSE Work Permit Procedure - Rev.1 - PDFEdu TBNo ratings yet
- NPK-000-B1-MR-400139-K Requisition For Sprinkler & Hosereel R0Document16 pagesNPK-000-B1-MR-400139-K Requisition For Sprinkler & Hosereel R0DangolNo ratings yet
- Survey, Clearing & Grading JPDocument5 pagesSurvey, Clearing & Grading JPSarfaraz AhmadNo ratings yet
- CenpesDocument33 pagesCenpesOrlando PWRNo ratings yet
- CPP-NA2-PM-PLN-0007 Procedure For Under Ground RTRDocument33 pagesCPP-NA2-PM-PLN-0007 Procedure For Under Ground RTRAdil IjazNo ratings yet
- Itp - Rev eDocument36 pagesItp - Rev ezaki_saddarNo ratings yet
- RFP RefDocument31 pagesRFP RefHicham MedgazNo ratings yet
- Wi Opr-E020 Sub-Station System Works (Edit 2)Document13 pagesWi Opr-E020 Sub-Station System Works (Edit 2)Yusuf AlfathonyNo ratings yet
- Hydrotest Procedure For PipelineDocument12 pagesHydrotest Procedure For Pipelineaike_577% (13)
- Methodstatement and RiskAssessmentDocument13 pagesMethodstatement and RiskAssessmentAnonymous ExWAN2xjFJ100% (1)
- CPP-NA2-PM-PLN-0027 Procedure For Cable and Conduit Seal InstallationDocument9 pagesCPP-NA2-PM-PLN-0027 Procedure For Cable and Conduit Seal InstallationAdil IjazNo ratings yet
- If TCCDocument38 pagesIf TCCKasturi MJNo ratings yet
- GP IomDocument12 pagesGP IomBalan SelvanNo ratings yet
- GP Range Installation and Maintenance ManualDocument12 pagesGP Range Installation and Maintenance ManualBobby SetiawanNo ratings yet
- 010-Method Statement of Coal Mill InstattalationDocument26 pages010-Method Statement of Coal Mill InstattalationHandri PuriNo ratings yet
- MST For Below Ground UPVC Drainage PipesDocument13 pagesMST For Below Ground UPVC Drainage Pipesمقاول تكييف كهرباء وصحيNo ratings yet
- VA2-DD09-P0ZEN-140004 Method Statement For Cable Tray System - Rev ADocument26 pagesVA2-DD09-P0ZEN-140004 Method Statement For Cable Tray System - Rev AHau Nguyen VanNo ratings yet
- EarthworksDocument66 pagesEarthworksPablo ArnaldoNo ratings yet
- P30350-11!99!93-1951 - Rev.a - Technical Bid Evaluation For Multiphase Flow Meters (MPFM)Document593 pagesP30350-11!99!93-1951 - Rev.a - Technical Bid Evaluation For Multiphase Flow Meters (MPFM)maheshNo ratings yet
- Data Network and Digital Microwave Radio Installation Operation, and Maintenance ManualDocument217 pagesData Network and Digital Microwave Radio Installation Operation, and Maintenance Manualselamet riantoNo ratings yet
- TOFD Procedure For VesselDocument12 pagesTOFD Procedure For Vesselmohanraj67% (3)
- Procedure For Material Preservation and Handling - OcxDocument10 pagesProcedure For Material Preservation and Handling - OcxAdil Ijaz100% (2)
- Procedure For Fiber Optic Cable Installation and TerminationDocument15 pagesProcedure For Fiber Optic Cable Installation and TerminationAdil IjazNo ratings yet
- Volume - IIDocument585 pagesVolume - IIRaji VargheseNo ratings yet
- NS1-18PAB-M-JEE-1002 R1 Erection Procedure For CW Piping InstallationDocument106 pagesNS1-18PAB-M-JEE-1002 R1 Erection Procedure For CW Piping Installationnamdq-1No ratings yet
- 3281-RP124-2!19!0001 (Method S... Ment Cable Installation) 1Document16 pages3281-RP124-2!19!0001 (Method S... Ment Cable Installation) 1Pradeep Kumar MaraptlaNo ratings yet
- 00-TAA-ABG-107008-00 Discipline ProcedureDocument8 pages00-TAA-ABG-107008-00 Discipline ProcedureSalman GhaffarNo ratings yet
- Raceway Method Statement: REV Date Reason For Issue BY CHK ApprDocument6 pagesRaceway Method Statement: REV Date Reason For Issue BY CHK ApprCristinel NechiforNo ratings yet
- Ione-Aa00-Pe-Cm-0032 Mechanical Run-In Test Procedure - Rev. ADocument20 pagesIone-Aa00-Pe-Cm-0032 Mechanical Run-In Test Procedure - Rev. AYusuf100% (1)
- TgBin TTB B0 HS 78045 Handling SRCC Documentation and DistributionDocument15 pagesTgBin TTB B0 HS 78045 Handling SRCC Documentation and DistributionRony LesbtNo ratings yet
- PA14-006-3W-0003 TR For Navigation AidDocument28 pagesPA14-006-3W-0003 TR For Navigation AidnautelNo ratings yet
- JMS METHOD OF STATEMENT - SURVEYING WORKS - BCOT - DraftDocument4 pagesJMS METHOD OF STATEMENT - SURVEYING WORKS - BCOT - Drafti24026096No ratings yet
- 412-20-180 Page 1 of 4 Approved For Public ReleaseDocument4 pages412-20-180 Page 1 of 4 Approved For Public Releasesebastian eduardoNo ratings yet
- Preliminar: CenpesDocument32 pagesPreliminar: CenpesAlan ReisNo ratings yet
- HFY3-3125-MEC-MR-0002 - 1 Code-ADocument31 pagesHFY3-3125-MEC-MR-0002 - 1 Code-AAshraf AbdulredhaNo ratings yet
- S-41-1224-001WR - Rev 1Document38 pagesS-41-1224-001WR - Rev 1heri_prasetyadiNo ratings yet
- 4 Wagaraw Road Stormwater OM ManualDocument33 pages4 Wagaraw Road Stormwater OM ManualNawshadNo ratings yet
- Honeywell Diff P Switch DPSDocument2 pagesHoneywell Diff P Switch DPSFrinaru CiprianNo ratings yet
- 1104Document45 pages1104fake nameNo ratings yet
- 2 Installation Guidelines NHP5Document7 pages2 Installation Guidelines NHP5Andrei ZahaNo ratings yet
- Rfa Monitoring - PGHDocument76 pagesRfa Monitoring - PGHRigelle DionisioNo ratings yet
- FYP Thesis Group 32Document82 pagesFYP Thesis Group 32Aamir IqbalNo ratings yet
- AVK UK Gross Price ListDocument184 pagesAVK UK Gross Price Listjeedan100% (1)
- VogtDocument5 pagesVogtjollyNo ratings yet
- Digital No Flow TimerDocument4 pagesDigital No Flow Timerzhangjie100% (1)
- Inner and Outer Diameters of Rigid Thermal Insulation For Nominal Sizes of Pipe and Tubing (NPS System)Document9 pagesInner and Outer Diameters of Rigid Thermal Insulation For Nominal Sizes of Pipe and Tubing (NPS System)ezequiel100% (1)
- Industrial and Genset Cooling System Issue 11Document49 pagesIndustrial and Genset Cooling System Issue 11khoirulfeb.rizmarosNo ratings yet
- Robor Corporate Leaflet EnglishDocument4 pagesRobor Corporate Leaflet EnglishChristiaan SnydersNo ratings yet
- Saudi Aramco Inspection Checklist: Installation of Wellhead Guard Rails. SAIC-L-2088 30-Apr-17 MechDocument4 pagesSaudi Aramco Inspection Checklist: Installation of Wellhead Guard Rails. SAIC-L-2088 30-Apr-17 Mechkarthi51289No ratings yet
- Medium Pressure and Low Pressure Steam Systems1Document4 pagesMedium Pressure and Low Pressure Steam Systems1Lao ZhuNo ratings yet
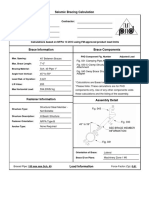
- Lateral Sway Brace ReportDocument2 pagesLateral Sway Brace ReportAry TubagusNo ratings yet
- Technical Data OEMP Sand FiltersDocument9 pagesTechnical Data OEMP Sand FiltersNebojsaNo ratings yet
- Research Group: Nozzles, Saddles, Pipe Shoes & ClipsDocument2 pagesResearch Group: Nozzles, Saddles, Pipe Shoes & ClipsdelitesoftNo ratings yet
- 4 - Gas Flow MeasurementDocument46 pages4 - Gas Flow MeasurementHashem HashemNo ratings yet
- Welded and Seamless Wrought Steel Pipe: ASME B36.10M-2004Document26 pagesWelded and Seamless Wrought Steel Pipe: ASME B36.10M-2004Sachin PatelNo ratings yet
- WP Sierra Capillary Thermal Users GuideDocument29 pagesWP Sierra Capillary Thermal Users Guidegermantoledo244596No ratings yet
- Blohm + Voss Mini Floorhand 9GF-8002 R2Document93 pagesBlohm + Voss Mini Floorhand 9GF-8002 R2Jeisson David Velandia MendivelsoNo ratings yet
- Holte Perforator User ManualDocument8 pagesHolte Perforator User Manualtomas caputoNo ratings yet
- IEEE Guide For Installation of Vertical Generators and Generator/Motors For Hydroelectric ApplicationsDocument40 pagesIEEE Guide For Installation of Vertical Generators and Generator/Motors For Hydroelectric ApplicationshansamvNo ratings yet
- Waste Heat Recovery UnitDocument15 pagesWaste Heat Recovery UnitEDUARDONo ratings yet
- Acdc - Ringlock Manual Latest 25-02-2012Document166 pagesAcdc - Ringlock Manual Latest 25-02-2012scavega8No ratings yet
- 32 Samss 006Document22 pages32 Samss 006naruto256No ratings yet
- 13480-5 - 2017 - EN-Inspection and TestingDocument34 pages13480-5 - 2017 - EN-Inspection and TestingPaulo VidasinhaNo ratings yet
- Bhelvision-20M: Operation and Maintenance ManualDocument37 pagesBhelvision-20M: Operation and Maintenance ManualSAROJ100% (2)
- (DIN 28050 - 2009-09) - Behà Lter Und Apparate - Maximal Zulã Ssiger Druck - 1, 0 Bar Bis +0, 5 Bar - Technische Lieferbedingungen - 0001.de - enDocument8 pages(DIN 28050 - 2009-09) - Behà Lter Und Apparate - Maximal Zulã Ssiger Druck - 1, 0 Bar Bis +0, 5 Bar - Technische Lieferbedingungen - 0001.de - enNaveen Suresh KumarNo ratings yet
- Flexible Pipe StudyDocument52 pagesFlexible Pipe StudycardozoedmNo ratings yet
























































































Download as docx, pdf, or txt
You might also like
- Sop For Set Up & Operation of Concrete PumpDocument3 pagesSop For Set Up & Operation of Concrete Pumplelu ojhaNo ratings yet
- Material Handling Study Report For Removable Tube BundleDocument9 pagesMaterial Handling Study Report For Removable Tube BundleMohamed FarisNo ratings yet
- Method Statement GIS HV TestDocument28 pagesMethod Statement GIS HV Testnayagammailbox75% (4)
- Valves Installation Method StatementsDocument16 pagesValves Installation Method StatementsLungisani100% (3)
- Jms Civil Work - RGTP p20220019 Esb Con Jms 9243 0005Document12 pagesJms Civil Work - RGTP p20220019 Esb Con Jms 9243 0005amir hakimNo ratings yet
- OPSS 450 Nov12Document11 pagesOPSS 450 Nov12jkhgvdj mnhsnjkhgNo ratings yet
- Temp Fencing & GateDocument12 pagesTemp Fencing & GateMark Fash0% (1)
- Assembly and Part Drawing: Water-Cooled Diesel EngineDocument2 pagesAssembly and Part Drawing: Water-Cooled Diesel Enginenelson moralesNo ratings yet
- PP14-00-Y-CNL-SAR-004-RA ConcreteDocument91 pagesPP14-00-Y-CNL-SAR-004-RA ConcretePablo ArnaldoNo ratings yet
- CPP-NA2-PM-PLN-0015 Procedure For Hydrostatic TestingDocument18 pagesCPP-NA2-PM-PLN-0015 Procedure For Hydrostatic TestingAdil Ijaz100% (1)
- QJ148-MS-G-003 - Gwc-Rlic-Permenent Access Culvert and Road Works.Document12 pagesQJ148-MS-G-003 - Gwc-Rlic-Permenent Access Culvert and Road Works.jafar mohdNo ratings yet
- Process Industry Practices Piping: PIP PNE00003 Process Unit and Offsites Layout GuideDocument14 pagesProcess Industry Practices Piping: PIP PNE00003 Process Unit and Offsites Layout GuideSilambarasan PalanisamyNo ratings yet
- WMS Excavation & BACKFILLINGDocument28 pagesWMS Excavation & BACKFILLINGRepl microsoft, PuneNo ratings yet
- FRN MST PPL Pl1 011 p4 C c1Document18 pagesFRN MST PPL Pl1 011 p4 C c1Utku Can Kılıç100% (1)
- STS QAC SOP 006 Repair Procedure For Stainless SteelDocument4 pagesSTS QAC SOP 006 Repair Procedure For Stainless Steelmohd as shahiddin jafriNo ratings yet
- Technical Specification For Level Control ValvesDocument13 pagesTechnical Specification For Level Control ValvesAylaNo ratings yet
- Method Statement - BackfillDocument8 pagesMethod Statement - BackfillJurie_sk3608100% (1)
- Epic For Upgrade of Port Control Tower and Systems at RlicDocument8 pagesEpic For Upgrade of Port Control Tower and Systems at RlicsreeNo ratings yet
- N0579-TJN-ET-MS0001 - R02 Method Statement For Grounding InstallationDocument19 pagesN0579-TJN-ET-MS0001 - R02 Method Statement For Grounding InstallationAbat SayekeyevNo ratings yet
- SEP-01-ZAA-1DC-010 - 1 - Method Statement For Earth WorksDocument11 pagesSEP-01-ZAA-1DC-010 - 1 - Method Statement For Earth WorksMike HernandezNo ratings yet
- NPDCDocument48 pagesNPDCEbby OnyekweNo ratings yet
- 1.0 Method Statement Above Ground - Drainage SystemDocument19 pages1.0 Method Statement Above Ground - Drainage Systemمقاول تكييف كهرباء وصحيNo ratings yet
- SofregazDocument26 pagesSofregazAbdulkadir Berk MalkoçNo ratings yet
- 0-WD010-MZ711-10002 HSE Work Permit Procedure - Rev.1 - PDFDocument11 pages0-WD010-MZ711-10002 HSE Work Permit Procedure - Rev.1 - PDFEdu TBNo ratings yet
- NPK-000-B1-MR-400139-K Requisition For Sprinkler & Hosereel R0Document16 pagesNPK-000-B1-MR-400139-K Requisition For Sprinkler & Hosereel R0DangolNo ratings yet
- Survey, Clearing & Grading JPDocument5 pagesSurvey, Clearing & Grading JPSarfaraz AhmadNo ratings yet
- CenpesDocument33 pagesCenpesOrlando PWRNo ratings yet
- CPP-NA2-PM-PLN-0007 Procedure For Under Ground RTRDocument33 pagesCPP-NA2-PM-PLN-0007 Procedure For Under Ground RTRAdil IjazNo ratings yet
- Itp - Rev eDocument36 pagesItp - Rev ezaki_saddarNo ratings yet
- RFP RefDocument31 pagesRFP RefHicham MedgazNo ratings yet
- Wi Opr-E020 Sub-Station System Works (Edit 2)Document13 pagesWi Opr-E020 Sub-Station System Works (Edit 2)Yusuf AlfathonyNo ratings yet
- Hydrotest Procedure For PipelineDocument12 pagesHydrotest Procedure For Pipelineaike_577% (13)
- Methodstatement and RiskAssessmentDocument13 pagesMethodstatement and RiskAssessmentAnonymous ExWAN2xjFJ100% (1)
- CPP-NA2-PM-PLN-0027 Procedure For Cable and Conduit Seal InstallationDocument9 pagesCPP-NA2-PM-PLN-0027 Procedure For Cable and Conduit Seal InstallationAdil IjazNo ratings yet
- If TCCDocument38 pagesIf TCCKasturi MJNo ratings yet
- GP IomDocument12 pagesGP IomBalan SelvanNo ratings yet
- GP Range Installation and Maintenance ManualDocument12 pagesGP Range Installation and Maintenance ManualBobby SetiawanNo ratings yet
- 010-Method Statement of Coal Mill InstattalationDocument26 pages010-Method Statement of Coal Mill InstattalationHandri PuriNo ratings yet
- MST For Below Ground UPVC Drainage PipesDocument13 pagesMST For Below Ground UPVC Drainage Pipesمقاول تكييف كهرباء وصحيNo ratings yet
- VA2-DD09-P0ZEN-140004 Method Statement For Cable Tray System - Rev ADocument26 pagesVA2-DD09-P0ZEN-140004 Method Statement For Cable Tray System - Rev AHau Nguyen VanNo ratings yet
- EarthworksDocument66 pagesEarthworksPablo ArnaldoNo ratings yet
- P30350-11!99!93-1951 - Rev.a - Technical Bid Evaluation For Multiphase Flow Meters (MPFM)Document593 pagesP30350-11!99!93-1951 - Rev.a - Technical Bid Evaluation For Multiphase Flow Meters (MPFM)maheshNo ratings yet
- Data Network and Digital Microwave Radio Installation Operation, and Maintenance ManualDocument217 pagesData Network and Digital Microwave Radio Installation Operation, and Maintenance Manualselamet riantoNo ratings yet
- TOFD Procedure For VesselDocument12 pagesTOFD Procedure For Vesselmohanraj67% (3)
- Procedure For Material Preservation and Handling - OcxDocument10 pagesProcedure For Material Preservation and Handling - OcxAdil Ijaz100% (2)
- Procedure For Fiber Optic Cable Installation and TerminationDocument15 pagesProcedure For Fiber Optic Cable Installation and TerminationAdil IjazNo ratings yet
- Volume - IIDocument585 pagesVolume - IIRaji VargheseNo ratings yet
- NS1-18PAB-M-JEE-1002 R1 Erection Procedure For CW Piping InstallationDocument106 pagesNS1-18PAB-M-JEE-1002 R1 Erection Procedure For CW Piping Installationnamdq-1No ratings yet
- 3281-RP124-2!19!0001 (Method S... Ment Cable Installation) 1Document16 pages3281-RP124-2!19!0001 (Method S... Ment Cable Installation) 1Pradeep Kumar MaraptlaNo ratings yet
- 00-TAA-ABG-107008-00 Discipline ProcedureDocument8 pages00-TAA-ABG-107008-00 Discipline ProcedureSalman GhaffarNo ratings yet
- Raceway Method Statement: REV Date Reason For Issue BY CHK ApprDocument6 pagesRaceway Method Statement: REV Date Reason For Issue BY CHK ApprCristinel NechiforNo ratings yet
- Ione-Aa00-Pe-Cm-0032 Mechanical Run-In Test Procedure - Rev. ADocument20 pagesIone-Aa00-Pe-Cm-0032 Mechanical Run-In Test Procedure - Rev. AYusuf100% (1)
- TgBin TTB B0 HS 78045 Handling SRCC Documentation and DistributionDocument15 pagesTgBin TTB B0 HS 78045 Handling SRCC Documentation and DistributionRony LesbtNo ratings yet
- PA14-006-3W-0003 TR For Navigation AidDocument28 pagesPA14-006-3W-0003 TR For Navigation AidnautelNo ratings yet
- JMS METHOD OF STATEMENT - SURVEYING WORKS - BCOT - DraftDocument4 pagesJMS METHOD OF STATEMENT - SURVEYING WORKS - BCOT - Drafti24026096No ratings yet
- 412-20-180 Page 1 of 4 Approved For Public ReleaseDocument4 pages412-20-180 Page 1 of 4 Approved For Public Releasesebastian eduardoNo ratings yet
- Preliminar: CenpesDocument32 pagesPreliminar: CenpesAlan ReisNo ratings yet
- HFY3-3125-MEC-MR-0002 - 1 Code-ADocument31 pagesHFY3-3125-MEC-MR-0002 - 1 Code-AAshraf AbdulredhaNo ratings yet
- S-41-1224-001WR - Rev 1Document38 pagesS-41-1224-001WR - Rev 1heri_prasetyadiNo ratings yet
- 4 Wagaraw Road Stormwater OM ManualDocument33 pages4 Wagaraw Road Stormwater OM ManualNawshadNo ratings yet
- Honeywell Diff P Switch DPSDocument2 pagesHoneywell Diff P Switch DPSFrinaru CiprianNo ratings yet
- 1104Document45 pages1104fake nameNo ratings yet
- 2 Installation Guidelines NHP5Document7 pages2 Installation Guidelines NHP5Andrei ZahaNo ratings yet
- Rfa Monitoring - PGHDocument76 pagesRfa Monitoring - PGHRigelle DionisioNo ratings yet
- FYP Thesis Group 32Document82 pagesFYP Thesis Group 32Aamir IqbalNo ratings yet
- AVK UK Gross Price ListDocument184 pagesAVK UK Gross Price Listjeedan100% (1)
- VogtDocument5 pagesVogtjollyNo ratings yet
- Digital No Flow TimerDocument4 pagesDigital No Flow Timerzhangjie100% (1)
- Inner and Outer Diameters of Rigid Thermal Insulation For Nominal Sizes of Pipe and Tubing (NPS System)Document9 pagesInner and Outer Diameters of Rigid Thermal Insulation For Nominal Sizes of Pipe and Tubing (NPS System)ezequiel100% (1)
- Industrial and Genset Cooling System Issue 11Document49 pagesIndustrial and Genset Cooling System Issue 11khoirulfeb.rizmarosNo ratings yet
- Robor Corporate Leaflet EnglishDocument4 pagesRobor Corporate Leaflet EnglishChristiaan SnydersNo ratings yet
- Saudi Aramco Inspection Checklist: Installation of Wellhead Guard Rails. SAIC-L-2088 30-Apr-17 MechDocument4 pagesSaudi Aramco Inspection Checklist: Installation of Wellhead Guard Rails. SAIC-L-2088 30-Apr-17 Mechkarthi51289No ratings yet
- Medium Pressure and Low Pressure Steam Systems1Document4 pagesMedium Pressure and Low Pressure Steam Systems1Lao ZhuNo ratings yet
- Lateral Sway Brace ReportDocument2 pagesLateral Sway Brace ReportAry TubagusNo ratings yet
- Technical Data OEMP Sand FiltersDocument9 pagesTechnical Data OEMP Sand FiltersNebojsaNo ratings yet
- Research Group: Nozzles, Saddles, Pipe Shoes & ClipsDocument2 pagesResearch Group: Nozzles, Saddles, Pipe Shoes & ClipsdelitesoftNo ratings yet
- 4 - Gas Flow MeasurementDocument46 pages4 - Gas Flow MeasurementHashem HashemNo ratings yet
- Welded and Seamless Wrought Steel Pipe: ASME B36.10M-2004Document26 pagesWelded and Seamless Wrought Steel Pipe: ASME B36.10M-2004Sachin PatelNo ratings yet
- WP Sierra Capillary Thermal Users GuideDocument29 pagesWP Sierra Capillary Thermal Users Guidegermantoledo244596No ratings yet
- Blohm + Voss Mini Floorhand 9GF-8002 R2Document93 pagesBlohm + Voss Mini Floorhand 9GF-8002 R2Jeisson David Velandia MendivelsoNo ratings yet
- Holte Perforator User ManualDocument8 pagesHolte Perforator User Manualtomas caputoNo ratings yet
- IEEE Guide For Installation of Vertical Generators and Generator/Motors For Hydroelectric ApplicationsDocument40 pagesIEEE Guide For Installation of Vertical Generators and Generator/Motors For Hydroelectric ApplicationshansamvNo ratings yet
- Waste Heat Recovery UnitDocument15 pagesWaste Heat Recovery UnitEDUARDONo ratings yet
- Acdc - Ringlock Manual Latest 25-02-2012Document166 pagesAcdc - Ringlock Manual Latest 25-02-2012scavega8No ratings yet
- 32 Samss 006Document22 pages32 Samss 006naruto256No ratings yet
- 13480-5 - 2017 - EN-Inspection and TestingDocument34 pages13480-5 - 2017 - EN-Inspection and TestingPaulo VidasinhaNo ratings yet
- Bhelvision-20M: Operation and Maintenance ManualDocument37 pagesBhelvision-20M: Operation and Maintenance ManualSAROJ100% (2)
- (DIN 28050 - 2009-09) - Behà Lter Und Apparate - Maximal Zulã Ssiger Druck - 1, 0 Bar Bis +0, 5 Bar - Technische Lieferbedingungen - 0001.de - enDocument8 pages(DIN 28050 - 2009-09) - Behà Lter Und Apparate - Maximal Zulã Ssiger Druck - 1, 0 Bar Bis +0, 5 Bar - Technische Lieferbedingungen - 0001.de - enNaveen Suresh KumarNo ratings yet
- Flexible Pipe StudyDocument52 pagesFlexible Pipe StudycardozoedmNo ratings yet