Download as pdf or txt
You might also like
- ENACb 1Document166 pagesENACb 1DarrylpnzNo ratings yet
- ELEG 5173L Digital Signal Processing Ch. 5 Digital Filters: Department of Electrical EngineeringDocument39 pagesELEG 5173L Digital Signal Processing Ch. 5 Digital Filters: Department of Electrical EngineeringNabeel HashimNo ratings yet
- Digital Filter Structures: K N X B K N y A N yDocument54 pagesDigital Filter Structures: K N X B K N y A N ySreenivasaRao Ch100% (1)
- Digital Filter Structures: K N X B K N y A N yDocument54 pagesDigital Filter Structures: K N X B K N y A N ygigartukudaNo ratings yet
- EE 301 Notes - Chapter 3 - Part 1Document17 pagesEE 301 Notes - Chapter 3 - Part 1farouq_razzaz2574No ratings yet
- Thvi Lecture 1Document46 pagesThvi Lecture 1Ricky VelascoNo ratings yet
- Supervisor: Dr. K.K. WijesundaraDocument23 pagesSupervisor: Dr. K.K. Wijesundarakhawaldeh jamalNo ratings yet
- CSE - 610 Lecture # 3Document20 pagesCSE - 610 Lecture # 3zaidNo ratings yet
- PCA Dr. Pawan Kumar TiwariDocument19 pagesPCA Dr. Pawan Kumar TiwariRudrakshitaNo ratings yet
- CSE - 610 Lecture # 9Document48 pagesCSE - 610 Lecture # 9zaidNo ratings yet
- 05 - LTI SystemsDocument23 pages05 - LTI SystemsdemononesNo ratings yet
- 06 Jacobi Gauss SeidelDocument65 pages06 Jacobi Gauss SeidelKim Harly100% (1)
- AdvDSP Lecture1Document43 pagesAdvDSP Lecture1Alireza DabiryNo ratings yet
- Spatial Descriptions and Transformation: (Chapter 2)Document59 pagesSpatial Descriptions and Transformation: (Chapter 2)Tooba Sami ArifeenNo ratings yet
- Actuators & Sensors Based On HBLS Smart HBLS Smart Materials MaterialsDocument22 pagesActuators & Sensors Based On HBLS Smart HBLS Smart Materials MaterialsSamNo ratings yet
- 3 Free Vibration LectureDocument16 pages3 Free Vibration LectureKhalil KhdourNo ratings yet
- Chapter 2 Analysis and Discription of DdsDocument30 pagesChapter 2 Analysis and Discription of DdsAnonymous AFFiZnNo ratings yet
- MathModellingOfMechanicalSystems PPT PDFDocument63 pagesMathModellingOfMechanicalSystems PPT PDFDarkMonsieurNo ratings yet
- L6 Bending of Beams Made of Homogeneous Materials and Composite MaterialsDocument23 pagesL6 Bending of Beams Made of Homogeneous Materials and Composite MaterialsAshish BhandariNo ratings yet
- 5 1 Analytical Dynamics 21 Part1Document29 pages5 1 Analytical Dynamics 21 Part1piaodawangNo ratings yet
- Lec11 Removed Removed RemovedDocument16 pagesLec11 Removed Removed RemovedSURAJIT DAS BAURINo ratings yet
- Lecture 6 - Spectrum Estimation PDFDocument47 pagesLecture 6 - Spectrum Estimation PDFMahy Magdy0% (1)
- CSE - 610 Lecture # 7Document38 pagesCSE - 610 Lecture # 7zaidNo ratings yet
- Exercise 6: Probability and Random Processes For Signals and SystemsDocument2 pagesExercise 6: Probability and Random Processes For Signals and SystemsGpNo ratings yet
- 6-Multi Disc Linear Systems AnnotatedDocument31 pages6-Multi Disc Linear Systems AnnotatedANIL EREN GÖÇERNo ratings yet
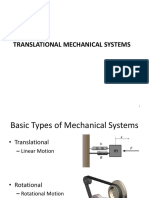
- 21 Translational Mechanical SystemDocument37 pages21 Translational Mechanical Systemmeseret sisayNo ratings yet
- 2-D Fir Filters Design Using Least Square Error With Scaling-Free Mcclellan TransformationDocument4 pages2-D Fir Filters Design Using Least Square Error With Scaling-Free Mcclellan Transformationकिशोरी जूNo ratings yet
- EP 5511 - Lecture 08Document23 pagesEP 5511 - Lecture 08Solomon Tadesse AthlawNo ratings yet
- DynamicsDocument41 pagesDynamicsHùng TrầnNo ratings yet
- EE501 Adaptive Filter Design: Instructor: Dr. Farhan KhalidDocument26 pagesEE501 Adaptive Filter Design: Instructor: Dr. Farhan KhalidSana SaadNo ratings yet
- Mathematic (III) : Fourier SeriesDocument5 pagesMathematic (III) : Fourier SeriesyehyaNo ratings yet
- II The Z Transform: Topics To Be CoveredDocument15 pagesII The Z Transform: Topics To Be CoveredJohn AssadNo ratings yet
- Unit 1.2Document9 pagesUnit 1.2hrishita.bhandaryNo ratings yet
- Structural Dynamics NotesDocument61 pagesStructural Dynamics Noteskpsd58625No ratings yet
- LECTURE 5: Optimisation of Catalytic ReactionsDocument34 pagesLECTURE 5: Optimisation of Catalytic ReactionsC. MNo ratings yet
- The Inverse Z-Transform: 1 Dr. B. Khan CECOS UniversityDocument48 pagesThe Inverse Z-Transform: 1 Dr. B. Khan CECOS UniversityUmer EhsanNo ratings yet
- 7.pca MdaDocument26 pages7.pca Mdacoding727treeNo ratings yet
- Comm 602 L2Document24 pagesComm 602 L2Abo dahabNo ratings yet
- 2 Examples AnnotatedDocument26 pages2 Examples AnnotatedANIL EREN GÖÇERNo ratings yet
- Unit IV Fir Design Lecture NotesDocument18 pagesUnit IV Fir Design Lecture NotesramuamtNo ratings yet
- Assignment 2Document3 pagesAssignment 2phatctNo ratings yet
- EE302 The Z-TransformDocument23 pagesEE302 The Z-TransformMohmed Al NajarNo ratings yet
- Chapter 2Document16 pagesChapter 2eng.rayan1996No ratings yet
- CH 3Document28 pagesCH 3jiales225No ratings yet
- CS - Chapter 7Document50 pagesCS - Chapter 7Mynam MeghanaNo ratings yet
- Formula Sheet For EE406: N N N N NDocument7 pagesFormula Sheet For EE406: N N N N NCFANo ratings yet
- Convolution of Discrete-Time Signals: - ObjectivesDocument14 pagesConvolution of Discrete-Time Signals: - ObjectivesDeepak KumarNo ratings yet
- Course Outline: TEL252E Signals and Systems Chapter 2Document26 pagesCourse Outline: TEL252E Signals and Systems Chapter 2Muhammet ÖzdemirNo ratings yet
- Process Control 5Document21 pagesProcess Control 5Mohamad AbdelkaderNo ratings yet
- Convolution of Discrete-Time Signals: - ObjectivesDocument14 pagesConvolution of Discrete-Time Signals: - ObjectivesMylavarapu SriprithamNo ratings yet
- Signals and SystemsDocument22 pagesSignals and SystemsAnbazhagan SelvanathanNo ratings yet
- CSE - 610 Lecture # 2Document46 pagesCSE - 610 Lecture # 2zaidNo ratings yet
- WK 11Document36 pagesWK 11Muhammad BilalNo ratings yet
- Elementary LinearDocument1 pageElementary LinearRubens Vilhena FonsecaNo ratings yet
- DSP Additonal Solved ExamplesDocument44 pagesDSP Additonal Solved ExamplesAnonymous VG6Zat1oNo ratings yet
- Question Bank Signal System Mod 3 by DeepakDocument12 pagesQuestion Bank Signal System Mod 3 by DeepakSaroj PatnaikNo ratings yet
- Chap 2Document65 pagesChap 2Daniel Madan Raja SNo ratings yet
- AMS 572 Presentation: CH 10 Simple Linear RegressionDocument54 pagesAMS 572 Presentation: CH 10 Simple Linear RegressionaliNo ratings yet
- Applied Mathematics II (E5)Document2 pagesApplied Mathematics II (E5)eliyasworku2No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Ikimono Gakari - HOT MILKDocument3 pagesIkimono Gakari - HOT MILKapi-3799292100% (1)
- Production of Biodegradable Plastics AsDocument6 pagesProduction of Biodegradable Plastics AsEbenezer EffisahNo ratings yet
- Electronics Cooling: Mechanical Power Engineering DeptDocument22 pagesElectronics Cooling: Mechanical Power Engineering DeptneilNo ratings yet
- Ex 4Document4 pagesEx 420-MCE-63 SYED HASSAN KUMAILNo ratings yet
- CWAG Rectangular CoordinatesDocument52 pagesCWAG Rectangular CoordinatesRolando MerleNo ratings yet
- Masterglenium Ace: Solutions For The Pre-Cast IndustryDocument7 pagesMasterglenium Ace: Solutions For The Pre-Cast IndustryAlanNo ratings yet
- Uremic EncephalophatyDocument48 pagesUremic EncephalophatySindi LadayaNo ratings yet
- CESCCommunityProjectPlan Brgy - MacarioDaconDocument6 pagesCESCCommunityProjectPlan Brgy - MacarioDaconKennedy BalmoriNo ratings yet
- Cefixime and Palpitations - From FDA ReportsDocument3 pagesCefixime and Palpitations - From FDA ReportsMuhammad UbaidNo ratings yet
- HPB21-0457 FINAL Submittal 09-07-2021 - Ritz Sagamore LOIDocument13 pagesHPB21-0457 FINAL Submittal 09-07-2021 - Ritz Sagamore LOIthe next miamiNo ratings yet
- Snag SummmariesDocument171 pagesSnag Summmarieslaltu adgiriNo ratings yet
- TPS54160 1.5-A, 60-V, Step-Down DC/DC Converter With Eco-Mode™Document57 pagesTPS54160 1.5-A, 60-V, Step-Down DC/DC Converter With Eco-Mode™sbrhomeNo ratings yet
- Op-Amp ExperimentDocument34 pagesOp-Amp ExperimentArooj Mukarram100% (1)
- 4 Poisonous & Venomous AnimalsDocument47 pages4 Poisonous & Venomous AnimalsAnyi Yulieth AMPUDIA MURILLONo ratings yet
- Filipino BasicDocument21 pagesFilipino BasicReiko Nakayama100% (1)
- Understanding Your Electricity Bill in PakistanDocument13 pagesUnderstanding Your Electricity Bill in PakistanGhayas Ud-din DarNo ratings yet
- Structural Engineering Professor Step III: Ucsd Academic Biography/Bibliography FormDocument30 pagesStructural Engineering Professor Step III: Ucsd Academic Biography/Bibliography FormCesar Paul Purihuaman MoraNo ratings yet
- Abb Reg615 Ansi Appl 859072 EndDocument124 pagesAbb Reg615 Ansi Appl 859072 EndjppreciadomNo ratings yet
- Model 621 LR B Data SheetDocument1 pageModel 621 LR B Data SheetMohammed GallowNo ratings yet
- Asma G.SDocument5 pagesAsma G.SAfia FaheemNo ratings yet
- (12942) Sheet Chemical Bonding 4 Theory eDocument8 pages(12942) Sheet Chemical Bonding 4 Theory eAnurag SinghNo ratings yet
- S900 Inverter User Manualv1.5 PDFDocument86 pagesS900 Inverter User Manualv1.5 PDFOmar ShadyNo ratings yet
- Sample Ale ExamDocument37 pagesSample Ale ExamMarian Lim100% (1)
- Base On Solid-Works Design of Compact High EfficieDocument15 pagesBase On Solid-Works Design of Compact High EfficieGorgeNo ratings yet
- Edible Oil - Case StudyDocument8 pagesEdible Oil - Case StudyVansh Raj GautamNo ratings yet
- Inbound 7104382368239826711Document51 pagesInbound 7104382368239826711katNo ratings yet
- ASTM GradesDocument4 pagesASTM GradesSaurabh MundheNo ratings yet
- Inverse of A FunctionDocument10 pagesInverse of A Functionnitin30100% (2)
- Flotrac Algorithm White PaperDocument4 pagesFlotrac Algorithm White PaperAnestesia 2017 UDECNo ratings yet