Download as pdf or txt
You might also like
- Quantum Optics Standing Wave Quantization: M. Brune, A. Aspect Homework of Lesson 1Document4 pagesQuantum Optics Standing Wave Quantization: M. Brune, A. Aspect Homework of Lesson 1bruhbruhbruh100% (2)
- Chuang Nielsen Unofficial SolutionsDocument49 pagesChuang Nielsen Unofficial SolutionsJoao Bravo100% (1)
- CIVE263 Group Design Project Brief 2019-20 v6Document15 pagesCIVE263 Group Design Project Brief 2019-20 v6Marvin ItolondoNo ratings yet
- Attachment 1Document18 pagesAttachment 1Marvin ItolondoNo ratings yet
- ME601: Assignment 1: I Ijk J K 1 2 3 3 2 2 3 1 1 3 3 1 2 2 1 I Ij J I Ij J I IDocument1 pageME601: Assignment 1: I Ijk J K 1 2 3 3 2 2 3 1 1 3 3 1 2 2 1 I Ij J I Ij J I Irocky bhaiNo ratings yet
- Notes On TensorDocument10 pagesNotes On Tensorrohit lamboraNo ratings yet
- δx D y D y D y y) (x)Document22 pagesδx D y D y D y y) (x)Divya SankrityaNo ratings yet
- 14 Marking Scheme: WorksheetDocument2 pages14 Marking Scheme: WorksheetMahad AsimNo ratings yet
- A New Approach For Solving Nonlinear Volterra Integro-Differential Equations With Mittag - Leffler KernelDocument15 pagesA New Approach For Solving Nonlinear Volterra Integro-Differential Equations With Mittag - Leffler KernelInforma.azNo ratings yet
- Multivariate Time Series ModelsDocument28 pagesMultivariate Time Series ModelsMd parvezsharifNo ratings yet
- Mathematical Tables and Algorithms: Appendix ADocument30 pagesMathematical Tables and Algorithms: Appendix AAshish SuriNo ratings yet
- Linear Algebra and Finite Dimensional Quantum Mechanics (Lecture Notes September 19)Document10 pagesLinear Algebra and Finite Dimensional Quantum Mechanics (Lecture Notes September 19)Yair HernandezNo ratings yet
- Cholesky MethodDocument6 pagesCholesky MethodZohaib AltafNo ratings yet
- Tutorial 6 SolnDocument2 pagesTutorial 6 Solnstayhungry0105No ratings yet
- Capitulo 1 1Document5 pagesCapitulo 1 1juan camiloNo ratings yet
- FicksLaw11 08 2018Document13 pagesFicksLaw11 08 2018sinhsolankidhavalNo ratings yet
- TRANSFORMATIONSFULLDocument58 pagesTRANSFORMATIONSFULLvishal singhNo ratings yet
- Appendices: Numerical Weather Prediction and Data Assimilation, First EditionDocument9 pagesAppendices: Numerical Weather Prediction and Data Assimilation, First EditionDiamondChuNo ratings yet
- Chapt 2Document213 pagesChapt 2pawNo ratings yet
- APL 701 Continuum Mechanics Department of Applied Mechanics Indian Institute of Technology DelhiDocument3 pagesAPL 701 Continuum Mechanics Department of Applied Mechanics Indian Institute of Technology DelhiVishal kumarNo ratings yet
- Linear Algebra Resupply Date Vi. Matrix Represention.: Definition 1. Ordered BasisDocument6 pagesLinear Algebra Resupply Date Vi. Matrix Represention.: Definition 1. Ordered Basis詹子軒No ratings yet
- M2 KB2Document5 pagesM2 KB2ViLya Kudu WiLujénkNo ratings yet
- As Linear Normed SpacesDocument12 pagesAs Linear Normed Spacesmisha2003zubritskyNo ratings yet
- Ejercicios de MatricesDocument9 pagesEjercicios de MatricesJESUS ROLANDO FIGUEROA CAMPANANo ratings yet
- Department of Mathematics Indian Institute of Technology, BombayDocument8 pagesDepartment of Mathematics Indian Institute of Technology, BombayVidushi VinodNo ratings yet
- Lecture 3 State-Space Solutions and Realization - v1Document76 pagesLecture 3 State-Space Solutions and Realization - v1Md Nur-A-Adam DonyNo ratings yet
- Lecture Notes: Composite Mechanics: Martin Fagerstr OmDocument96 pagesLecture Notes: Composite Mechanics: Martin Fagerstr OmSsheshan PugazhendhiNo ratings yet
- 4-State Space SolutionsDocument42 pages4-State Space SolutionsMd Nur-A-Adam DonyNo ratings yet
- C3 - Pas - MSDocument7 pagesC3 - Pas - MSRohit HaoladerNo ratings yet
- Quize and MidsemDocument51 pagesQuize and MidsemSahil GalaNo ratings yet
- Aircraft Pitch Roll DynamicsDocument8 pagesAircraft Pitch Roll Dynamicsxirij47633No ratings yet
- Lecture Notes: Composite Mechanics: Martin Fagerstr OmDocument102 pagesLecture Notes: Composite Mechanics: Martin Fagerstr OmnwoforNo ratings yet
- LN Tme240 PDFDocument96 pagesLN Tme240 PDFSsheshan Pugazhendhi100% (1)
- Exam 1Document10 pagesExam 1FunWithNumbers88No ratings yet
- 2nd Unit MathsDocument10 pages2nd Unit MathsMeenuNo ratings yet
- IIT Guhati Note Continuum MechanicsDocument254 pagesIIT Guhati Note Continuum MechanicsRahul KarnaNo ratings yet
- Jing - Poverty Dynamics and Vulnerability To Poverty An Empirical Analysis Using General Household SurveysDocument16 pagesJing - Poverty Dynamics and Vulnerability To Poverty An Empirical Analysis Using General Household SurveysNova TambunanNo ratings yet
- Analisa Vektor 20 Agus 2019Document8 pagesAnalisa Vektor 20 Agus 2019AulNo ratings yet
- Tutorial 4 SolnDocument1 pageTutorial 4 Solnstayhungry0105No ratings yet
- PSet5 SolutionsDocument4 pagesPSet5 SolutionsAlexander QuNo ratings yet
- Linalg17 PDFDocument12 pagesLinalg17 PDFKhalida NoureenNo ratings yet
- Linear Algebra Assignments IITKDocument28 pagesLinear Algebra Assignments IITKpublicacc71No ratings yet
- Lecture No ThreeDocument5 pagesLecture No ThreeSeif RadwanNo ratings yet
- Assignment # 2 M.TahrawiDocument8 pagesAssignment # 2 M.TahrawiMohanad Al-tahrawiNo ratings yet
- dg1 hw1 SolutionsDocument8 pagesdg1 hw1 Solutionschristophercabezas93No ratings yet
- Multivariate Analysis - M.EDocument131 pagesMultivariate Analysis - M.EFarm HouseNo ratings yet
- David J. Griffiths - Introduction To Electrodynamics - Instructor's Solutions Manual (1999)Document250 pagesDavid J. Griffiths - Introduction To Electrodynamics - Instructor's Solutions Manual (1999)pedro suarezNo ratings yet
- FormulasDocument1 pageFormulaswincrestNo ratings yet
- Vector and Tensor Components TransformDocument5 pagesVector and Tensor Components Transformchemicalchouhan9303No ratings yet
- Solutions: Homework Set 2: Due August 21Document4 pagesSolutions: Homework Set 2: Due August 21Michel Rodrigues Andrade100% (2)
- Solution of The State EquationDocument6 pagesSolution of The State EquationJames KabugoNo ratings yet
- Chapter 14 Complex IntegrationDocument26 pagesChapter 14 Complex Integrationayewinko143No ratings yet
- Solutions: Problem Set 1: January 17, 2013Document9 pagesSolutions: Problem Set 1: January 17, 2013Kanchan GorainNo ratings yet
- 5-EMF Sohaila LabReportDocument4 pages5-EMF Sohaila LabReportsohaila gaberNo ratings yet
- Problem Set 1Document5 pagesProblem Set 1Felipe TomkowskiNo ratings yet
- Bayesian Quiz1 SolutionsDocument2 pagesBayesian Quiz1 SolutionszeliawillscumbergNo ratings yet
- Some Basics of Matrix Calculation: Ij N, K I, J 1Document3 pagesSome Basics of Matrix Calculation: Ij N, K I, J 1b00kb00kNo ratings yet
- Formule 19632Document2 pagesFormule 19632Ion NagomirNo ratings yet
- Inverse Trigonometric Functions (Trigonometry) Mathematics Question BankFrom EverandInverse Trigonometric Functions (Trigonometry) Mathematics Question BankNo ratings yet
- Phase 2Document10 pagesPhase 2Marvin ItolondoNo ratings yet
- 01Document1 page01Marvin ItolondoNo ratings yet
- Solution 1Document14 pagesSolution 1Marvin ItolondoNo ratings yet
- Requiem Mass For Lawrence Mullama ItolondoDocument8 pagesRequiem Mass For Lawrence Mullama ItolondoMarvin ItolondoNo ratings yet
- Set 2Document8 pagesSet 2Marvin ItolondoNo ratings yet
- Vassignment 1Document4 pagesVassignment 1Marvin ItolondoNo ratings yet
- SsDocument3 pagesSsMarvin ItolondoNo ratings yet
- Mama Helen FDocument10 pagesMama Helen FMarvin ItolondoNo ratings yet
- Nwankwo Ukamaka ChiomaDocument4 pagesNwankwo Ukamaka ChiomaMarvin ItolondoNo ratings yet
- Kabasis-15 - BBS Concrete Sleeper DetailsDocument1 pageKabasis-15 - BBS Concrete Sleeper DetailsMarvin ItolondoNo ratings yet
- Visio-Drawing1 Copy-1691823179070Document1 pageVisio-Drawing1 Copy-1691823179070Marvin ItolondoNo ratings yet
- Saudi Arabia Stock MarketDocument16 pagesSaudi Arabia Stock MarketMarvin ItolondoNo ratings yet
- WWWWWDocument1 pageWWWWWMarvin ItolondoNo ratings yet
- Project Designing A Habitat in MarsDocument13 pagesProject Designing A Habitat in MarsMarvin ItolondoNo ratings yet
- The Report: Sewer DesignDocument20 pagesThe Report: Sewer DesignMarvin ItolondoNo ratings yet
- CIV E 482 - Design Lab Stromwater Management: What Is The Importance of Today's Lab?Document14 pagesCIV E 482 - Design Lab Stromwater Management: What Is The Importance of Today's Lab?Marvin ItolondoNo ratings yet
- Mama Helen HouseDocument1 pageMama Helen HouseMarvin ItolondoNo ratings yet
- Geometric Design of A Highway Using Autocad Civil 3D: Presenter NameDocument11 pagesGeometric Design of A Highway Using Autocad Civil 3D: Presenter NameMarvin ItolondoNo ratings yet
- Geometric Design of A Highway Using Autocad Civil 3D: Presenter NameDocument12 pagesGeometric Design of A Highway Using Autocad Civil 3D: Presenter NameMarvin ItolondoNo ratings yet
- Factoring The Load Demand: SolutionDocument8 pagesFactoring The Load Demand: SolutionMarvin ItolondoNo ratings yet
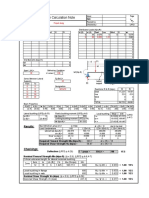
- Steel I - Beam Calculation Note Steel I - Beam Calculation NoteDocument2 pagesSteel I - Beam Calculation Note Steel I - Beam Calculation NoteMarvin ItolondoNo ratings yet
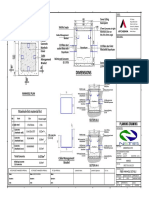
- Kabasis-16 - Fiber Manhole DetailsDocument1 pageKabasis-16 - Fiber Manhole DetailsMarvin ItolondoNo ratings yet
- Kabasis-12 - Generator Concrete SleeperDocument1 pageKabasis-12 - Generator Concrete SleeperMarvin ItolondoNo ratings yet
- Planning Drawing: Bts Concrete Sleepers Material ListDocument1 pagePlanning Drawing: Bts Concrete Sleepers Material ListMarvin ItolondoNo ratings yet
- Freddie Jeffries - Fang You - Hajie Shan - Linghao Chen - Mischa Patel - Hywel BeasdaleDocument39 pagesFreddie Jeffries - Fang You - Hajie Shan - Linghao Chen - Mischa Patel - Hywel BeasdaleMarvin ItolondoNo ratings yet
- 2fy2-01 Engineering Mathematics-I (A To D)Document3 pages2fy2-01 Engineering Mathematics-I (A To D)gwanfldlwjwuwNo ratings yet
- Cofactor and Determinants - Lec 3Document27 pagesCofactor and Determinants - Lec 3No[o]ne DotaNo ratings yet
- Lect 1 - Introduction To The Course - 16B1NMA533Document23 pagesLect 1 - Introduction To The Course - 16B1NMA5339921103067No ratings yet
- Memorial Universicty of Newfoundland Linear Algebra I Lecture Notes 1 - 9 - Math 2050 Sect. 2 With AnswersDocument57 pagesMemorial Universicty of Newfoundland Linear Algebra I Lecture Notes 1 - 9 - Math 2050 Sect. 2 With Answersjeferson.ordonioNo ratings yet
- Matrix Reasoning Questions Answers and ExplanationDocument5 pagesMatrix Reasoning Questions Answers and ExplanationSiripireddy VaibhavNo ratings yet
- Matrix SheetDocument37 pagesMatrix Sheetarnobkhan821No ratings yet
- ÇS Matris1Document1 pageÇS Matris1refikrefikoglu636No ratings yet
- Bài tập dai - so-tuyen - tinhDocument7 pagesBài tập dai - so-tuyen - tinhTrần Gia ThànhNo ratings yet
- Assignment of Matrx and Determinants - XII - 2024-25Document3 pagesAssignment of Matrx and Determinants - XII - 2024-25PuceNo ratings yet
- MAE101 ALG Chapter 2 - Matrix AlgebraDocument83 pagesMAE101 ALG Chapter 2 - Matrix Algebratranquockhanh933No ratings yet
- 1718432213Document7 pages1718432213shubhmehar986No ratings yet
- Advanced Level DPP Matrices Determinants Question MathongoDocument15 pagesAdvanced Level DPP Matrices Determinants Question MathongoShourya GroverNo ratings yet
- Ma2101 Cheatsheet FinalsDocument2 pagesMa2101 Cheatsheet Finalsyinsun0309No ratings yet
- MatricesDocument8 pagesMatricesRhey LuceroNo ratings yet
- MT1004 - Course Outline - Spring 2023Document2 pagesMT1004 - Course Outline - Spring 2023rizwan aliNo ratings yet
- Adobe Scan Mar 05, 2024Document25 pagesAdobe Scan Mar 05, 2024radhika.gupta3750No ratings yet
- MatrixDocument224 pagesMatrixharshsampat1105No ratings yet
- Important Short Questions of LADocument35 pagesImportant Short Questions of LAMuhammad UzairNo ratings yet
- Single Answer Type:: Tan Tan 9 A BDocument7 pagesSingle Answer Type:: Tan Tan 9 A Bipsita lahiriNo ratings yet
- MAT3701 Assignment 01 2024Document2 pagesMAT3701 Assignment 01 2024leratobaloyi386No ratings yet
- Matrices Question BankDocument141 pagesMatrices Question Bankkhatunrojina48366No ratings yet
- Matrix Calculus Kronecker Product Applications C++ Programs: and With andDocument263 pagesMatrix Calculus Kronecker Product Applications C++ Programs: and With and张儒No ratings yet
- Lecture 1 - (Spring 2024)Document12 pagesLecture 1 - (Spring 2024)wei.cNo ratings yet
- Homework Problems. Module 1Document3 pagesHomework Problems. Module 1Chafey MuNo ratings yet
- Linear Algebra Chap 1Document64 pagesLinear Algebra Chap 1Mian HaziqNo ratings yet
- Stack EditDocument18 pagesStack Editasd5 777No ratings yet
- 692) CH - 31 CLASS - 5kshitijDocument7 pages692) CH - 31 CLASS - 5kshitijGAURAV YADAVNo ratings yet
- Ques. DETERMINANTSDocument4 pagesQues. DETERMINANTSYASH KUMARNo ratings yet
- Sheet-2 (Vector Space) - 1Document4 pagesSheet-2 (Vector Space) - 1Soumadeep PatraNo ratings yet
- Mth501 Mid Term by JuanidDocument36 pagesMth501 Mid Term by JuanidomersaleemNo ratings yet