Download as pdf or txt
You might also like
- 2011 Infiniti G37 Sedan Service Repair Manual PDFDocument17 pages2011 Infiniti G37 Sedan Service Repair Manual PDFfjjsjekdmmeNo ratings yet
- Transportation Engineering and PrinciplesDocument25 pagesTransportation Engineering and PrinciplesKaraline Marces67% (3)
- AE Civil Questions - Highway EngineeringDocument11 pagesAE Civil Questions - Highway EngineeringVishnu Nandakumar100% (1)
- 472design and Simulation of Four Wheel Steering System For LMV PDFDocument4 pages472design and Simulation of Four Wheel Steering System For LMV PDFAfzal dawood100% (1)
- An Approach To Parallel Parking and Zero PDFDocument4 pagesAn Approach To Parallel Parking and Zero PDFajayNo ratings yet
- Ijirt154739 Paper PDFDocument4 pagesIjirt154739 Paper PDFAnuka VarshaNo ratings yet
- Study of Steering Mechanism MechanicalDocument9 pagesStudy of Steering Mechanism MechanicalSANURASAGARNo ratings yet
- Lab No 7 Meen21101037Document8 pagesLab No 7 Meen21101037Ali MunawarNo ratings yet
- 10 - Front Axle & Steering SystemDocument29 pages10 - Front Axle & Steering SystemDeep Umradiya100% (1)
- Automobile Engineering 3rd YearDocument4 pagesAutomobile Engineering 3rd YearAkarshanNo ratings yet
- Design and Manufacturing of Gearbox ForDocument11 pagesDesign and Manufacturing of Gearbox ForFred BosmanNo ratings yet
- 09db7a34f8 21 IarjetDocument4 pages09db7a34f8 21 IarjetVinit TyagiNo ratings yet
- Mechanics Lab Assignment #3Document4 pagesMechanics Lab Assignment #3Farhan AminNo ratings yet
- Chapter 7 Steering SystemDocument49 pagesChapter 7 Steering SystemBK MKNo ratings yet
- Steering SystemDocument15 pagesSteering Systemprasanth100% (1)
- Steering Control HeadlightDocument14 pagesSteering Control HeadlightManasir Hussain0% (1)
- Sai Kumar Mini ProjectDocument22 pagesSai Kumar Mini Projectrahulbattini59No ratings yet
- Exp4 LabDocument8 pagesExp4 LabRamesh Kavitha Sanjit 18BME0677No ratings yet
- Ackermann SteeringDocument3 pagesAckermann SteeringDorijan ČargonjaNo ratings yet
- Fig.4 Block Diagram of Road Power GenerationDocument14 pagesFig.4 Block Diagram of Road Power Generationशशांक आर्यNo ratings yet
- Ackerman Hybrid CarDocument5 pagesAckerman Hybrid CarpranabNo ratings yet
- Hydraulic Power Steering System Learning SimulationDocument8 pagesHydraulic Power Steering System Learning SimulationhamayunNo ratings yet
- Assignment 3 AutomobileDocument11 pagesAssignment 3 Automobilepawan sharmaNo ratings yet
- Steering SystemDocument37 pagesSteering SystemSandeep Magapu100% (1)
- CH 7 Steering SystemDocument50 pagesCH 7 Steering SystemMartha BelayNo ratings yet
- Three Mode Four Wheel Steering-1-1Document15 pagesThree Mode Four Wheel Steering-1-1sree kanthNo ratings yet
- Design and Optimization of Front Axle of Heavy TruckDocument10 pagesDesign and Optimization of Front Axle of Heavy TruckBurak TuncerNo ratings yet
- Design and Fabrication of Two Modes of Steering FinalDocument38 pagesDesign and Fabrication of Two Modes of Steering FinalS18M168 SUJAN BALAJI SNo ratings yet
- Chain Less BicycleDocument46 pagesChain Less BicycleShubham PatilNo ratings yet
- Chapter-Seven: Steering SystemDocument46 pagesChapter-Seven: Steering Systemyared admassuNo ratings yet
- AutomobileDocument70 pagesAutomobileSanjay VaijNo ratings yet
- UNIT-6 1.steering System 2.suspension System 3.braking SystemDocument119 pagesUNIT-6 1.steering System 2.suspension System 3.braking SystemNikhilraj rudraNo ratings yet
- Problems On Epicyclical Gear TrainDocument69 pagesProblems On Epicyclical Gear TrainpadisudeepNo ratings yet
- Ackermann Steering GeometryDocument3 pagesAckermann Steering Geometrydjaver100% (1)
- Steering FinalDocument7 pagesSteering FinalMayur PanchalNo ratings yet
- Design and Fabrication of Ackerman Steering Mechanism Combining With ABSDocument8 pagesDesign and Fabrication of Ackerman Steering Mechanism Combining With ABSŚhřëə ŠhřëəNo ratings yet
- Design and Optimization of Front Axle of Heavy Truck: August 2019Document10 pagesDesign and Optimization of Front Axle of Heavy Truck: August 2019Mr ZekeNo ratings yet
- Steering System-EngDocument12 pagesSteering System-Engobaid356ullahNo ratings yet
- Good Morning .?: Presentation On Vehicle Steering Systems by Pari, D.J & K.CDocument29 pagesGood Morning .?: Presentation On Vehicle Steering Systems by Pari, D.J & K.CSrikar ChinmayaNo ratings yet
- SteeringDocument36 pagesSteeringHimanshu Yadav100% (1)
- Design and Analysis of An Epicyclic Gear Train Mechanism: Saroj Mohan Institute of TechnologyDocument20 pagesDesign and Analysis of An Epicyclic Gear Train Mechanism: Saroj Mohan Institute of TechnologyMy ProNo ratings yet
- Steering SystemDocument49 pagesSteering SystemDhanu MalarNo ratings yet
- 6th Semestermechanical Automobile Engineering Lab ManualDocument21 pages6th Semestermechanical Automobile Engineering Lab ManualSayan BiswasNo ratings yet
- Mass College ProjectDocument68 pagesMass College ProjectGLOBAL INFO-TECH KUMBAKONAMNo ratings yet
- Fabrication of Four Wheel Steering MechanismDocument50 pagesFabrication of Four Wheel Steering MechanismMechWindNaniNo ratings yet
- Design Analysis and Optimization of Front Axle For Commercial Vehicle Using CAEDocument7 pagesDesign Analysis and Optimization of Front Axle For Commercial Vehicle Using CAEPradeep Adsare100% (1)
- Usage of Tumbler Gear Mechanism in Four Wheel SteeringDocument5 pagesUsage of Tumbler Gear Mechanism in Four Wheel SteeringKitkuparbha MawrieNo ratings yet
- Steering System: Introduction: This System Provides The Directional ChangeDocument14 pagesSteering System: Introduction: This System Provides The Directional ChangeAkash Sood100% (1)
- Kinematics of Machines: P.Chinna Rao Assistant Professor Department of Mechanical Engineering Rgukt-Ap Iiit-SrikakulamDocument16 pagesKinematics of Machines: P.Chinna Rao Assistant Professor Department of Mechanical Engineering Rgukt-Ap Iiit-SrikakulamNarasimha KumarNo ratings yet
- Differential System ComponentsDocument9 pagesDifferential System ComponentsScribdTranslationsNo ratings yet
- Steering Gears Steering Mechanisms: BY NIKHIL BAHL 2K7/ME/267 Raghav Saxena 2K7/Me/284Document34 pagesSteering Gears Steering Mechanisms: BY NIKHIL BAHL 2K7/ME/267 Raghav Saxena 2K7/Me/284Anonymous LFgO4WbIDNo ratings yet
- Ackerman Steering MechanismDocument17 pagesAckerman Steering MechanismNinad Mirajgaonkar50% (2)
- Motorized Smart Turning Mechanism: Romesh Bhavsar, Sumeet Singh, Harshal Valesha, Rushabh Salunkhe, Suyog PatilDocument3 pagesMotorized Smart Turning Mechanism: Romesh Bhavsar, Sumeet Singh, Harshal Valesha, Rushabh Salunkhe, Suyog PatilSUMEET SINGHNo ratings yet
- MCT 311 Lesson 5Document16 pagesMCT 311 Lesson 5Moussa SaidNo ratings yet
- Four Wheel Steering SystemDocument14 pagesFour Wheel Steering SystemChakri KankipatiNo ratings yet
- Ackermann Steering GeometryDocument3 pagesAckermann Steering Geometryanon_630379003No ratings yet
- Mini Project Report: Differential Gear SystemDocument22 pagesMini Project Report: Differential Gear SystemSonu DasNo ratings yet
- Chp#2 (Full Editing Complete)Document26 pagesChp#2 (Full Editing Complete)Hammad ShahNo ratings yet
- Ijcrt22a6502 Rack PinonDocument9 pagesIjcrt22a6502 Rack PinonenkusilasorsaNo ratings yet
- J IndexDocument4 pagesJ Indexapi-3820466No ratings yet
- VW Beetle Wiring and Fuse Box Info 1998Document9 pagesVW Beetle Wiring and Fuse Box Info 1998Bradley BergNo ratings yet
- Indian RailwaysDocument31 pagesIndian RailwaysRaj BakhtaniNo ratings yet
- Sugar Crane Harvester BrosureDocument20 pagesSugar Crane Harvester BrosurenightfurryifyNo ratings yet
- Geometric Design of Highways (2 Units)Document31 pagesGeometric Design of Highways (2 Units)Gerald MagingaNo ratings yet
- Pavement Design Principles For T3Document90 pagesPavement Design Principles For T3Irfan Ali100% (1)
- Anti Lock Brake SystemDocument16 pagesAnti Lock Brake SystemMelvin MhdsNo ratings yet
- Traffic Solutions For Metro Manila A Realistic ApproachDocument10 pagesTraffic Solutions For Metro Manila A Realistic ApproachDoms Dominguez100% (1)
- Harnes MotorDocument3 pagesHarnes MotorAndy PerezNo ratings yet
- EstimateDocument2 pagesEstimateAnonymous nr5WqzhQfNo ratings yet
- Highway Failure & Their Maintenance: Government Polytechnic, KoraputDocument12 pagesHighway Failure & Their Maintenance: Government Polytechnic, KoraputAniket zNo ratings yet
- Road Materials and Pavement DesignDocument19 pagesRoad Materials and Pavement DesignKlisman A. Flores DurandNo ratings yet
- Technial Spec FMXDocument10 pagesTechnial Spec FMXBenjamin Vasquez CabreraNo ratings yet
- Detailed Spec - Volvo Day CabDocument9 pagesDetailed Spec - Volvo Day CabmoooooooooonmNo ratings yet
- ATA 32 - Landing Gear and Brakes Systems ModuleDocument50 pagesATA 32 - Landing Gear and Brakes Systems ModulejavalderaNo ratings yet
- C 530Document4 pagesC 530Vlad SuteuNo ratings yet
- BA 1200RD AA02418V-AB03158 en 1000081376Document102 pagesBA 1200RD AA02418V-AB03158 en 1000081376liquidxy100% (1)
- ONE SAFE SOURCES Tires PECP9067-03-20Document8 pagesONE SAFE SOURCES Tires PECP9067-03-20agvassNo ratings yet
- Presentation On Automotive Sensors: Presented BYDocument36 pagesPresentation On Automotive Sensors: Presented BYTarun BansalNo ratings yet
- Internal Combustion Engine FundamentalsDocument30 pagesInternal Combustion Engine FundamentalssachNo ratings yet
- Assignment Judy 1Document5 pagesAssignment Judy 1Maria Ellaine SorianoNo ratings yet
- TABS6 4S-2M ABS SideDocument1 pageTABS6 4S-2M ABS SideCastro A. GerardoNo ratings yet
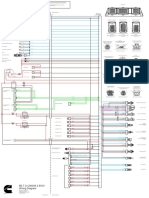
- B6.7 G CMOH6.0 B125 Wiring Diagram: Data Links GreenDocument1 pageB6.7 G CMOH6.0 B125 Wiring Diagram: Data Links GreenjuanNo ratings yet
- Alstom From Mainline Signaling To Digital Automation FinalDocument12 pagesAlstom From Mainline Signaling To Digital Automation FinalBook LoverNo ratings yet
- 04powertrain Mar2017Document16 pages04powertrain Mar2017Hussain AliNo ratings yet
- Allison T350R0709 Red SwirlDocument33 pagesAllison T350R0709 Red Swirl古張No ratings yet
- Introduction To Transportation EngineeringDocument22 pagesIntroduction To Transportation EngineeringGraciele Sera-Revocal100% (2)