Download as docx, pdf, or txt
You might also like
- Forces and Principles of Flight Lesson PlanDocument10 pagesForces and Principles of Flight Lesson PlanJimmy HaddadNo ratings yet
- Exercise 4 Effects of ControlsDocument58 pagesExercise 4 Effects of Controlss raman100% (2)
- Fixed Wing Vs Rotary Wing AircraftDocument6 pagesFixed Wing Vs Rotary Wing AircraftMuhammad AmmadNo ratings yet
- Chapter 2Document13 pagesChapter 2Jack PalNo ratings yet
- EX 4 - Effect of ControlsDocument18 pagesEX 4 - Effect of ControlsAhmed MohammedNo ratings yet
- AIRCRAFTDocument5 pagesAIRCRAFTMaestrado AlyssaNo ratings yet
- 14008A ch7 PDFDocument27 pages14008A ch7 PDFtmt IngNo ratings yet
- Basics of AerodynamicsDocument9 pagesBasics of Aerodynamicssid25harthNo ratings yet
- Ex 6 - Straight and LevelDocument10 pagesEx 6 - Straight and LevelAhmed MohammedNo ratings yet
- FM 1-514 Principles of Helicopter FlightDocument59 pagesFM 1-514 Principles of Helicopter Flightwawaland100% (1)
- POF PPL 2 HandoutsDocument7 pagesPOF PPL 2 HandoutssolideojadeNo ratings yet
- Theory of FlightDocument2 pagesTheory of FlightCamilo Astudillo YañezNo ratings yet
- Pof ZadabdolahDocument80 pagesPof Zadabdolahrozhinhadi63No ratings yet
- AC 61-23C Chapter 1 CanadaDocument34 pagesAC 61-23C Chapter 1 Canadadnana_rianNo ratings yet
- Introduction To AircraftDocument19 pagesIntroduction To AircraftVikash PalNo ratings yet
- Aircraft BasicsDocument328 pagesAircraft BasicsJhony Bhat100% (1)
- Flight Dispatchers Recurrent Trainning: Max Air LTD JULY 2017Document57 pagesFlight Dispatchers Recurrent Trainning: Max Air LTD JULY 2017Kabir ShariffNo ratings yet
- Fundamentals of Rotor and Power Train Maintenance - Techniques and ProceduresDocument68 pagesFundamentals of Rotor and Power Train Maintenance - Techniques and Proceduresmaharajsaini4229No ratings yet
- Orientation PDF RSADocument66 pagesOrientation PDF RSAKaustubh RihekarNo ratings yet
- Principles of Flight: Learning ObjectivesDocument12 pagesPrinciples of Flight: Learning ObjectivesAshmi ShajiNo ratings yet
- Glider HandbookDocument20 pagesGlider Handbookjilu100% (1)
- Principles of FlightDocument28 pagesPrinciples of FlightbobNo ratings yet
- Principles of FlightDocument54 pagesPrinciples of FlightHASSAN DADDANo ratings yet
- POF DescriptiveDocument7 pagesPOF DescriptiveN HasibNo ratings yet
- Theory of Flight: Submitted By: Darren Rebato MontallanaDocument3 pagesTheory of Flight: Submitted By: Darren Rebato MontallanaDarren MontallanaNo ratings yet
- Lecture 2 AERONAUTICAL NOMENCLATUREDocument20 pagesLecture 2 AERONAUTICAL NOMENCLATUREIvan GluhenkiyNo ratings yet
- The Mechanics of Flight and Bird Migration Performance: Rayner!Document17 pagesThe Mechanics of Flight and Bird Migration Performance: Rayner!Stiven CastellanosNo ratings yet
- Dgca - Classification of DroneDocument14 pagesDgca - Classification of DroneKoushik UdayachandranNo ratings yet
- Lift Generation of Forward Flying Helicopters/rotorsDocument3 pagesLift Generation of Forward Flying Helicopters/rotorsMaximNo ratings yet
- Forces Acting Along The Y-Axis: Lift and WeightDocument3 pagesForces Acting Along The Y-Axis: Lift and Weightsufyan khalidNo ratings yet
- Helicopter Assignment 2Document8 pagesHelicopter Assignment 2Johnzen Kim BaluyotNo ratings yet
- Helicopter's Flying MechanismDocument23 pagesHelicopter's Flying MechanismRoxcyyyy100% (1)
- Take-Off: Aircraft Flight Mechanics Are Relevant To Fixed Wing (Document3 pagesTake-Off: Aircraft Flight Mechanics Are Relevant To Fixed Wing (Ali ÇakircaNo ratings yet
- Aircraft Motion (Part 4)Document2 pagesAircraft Motion (Part 4)Neeraj ShuklaNo ratings yet
- Fundamentals of Flight: A Basic Introduction To AerodynamicsDocument54 pagesFundamentals of Flight: A Basic Introduction To AerodynamicsBilal AhmadNo ratings yet
- UPRT - Aerodynamic Principles of Large Airplane Upsets MAR 16Document14 pagesUPRT - Aerodynamic Principles of Large Airplane Upsets MAR 16Sacha MilovanNo ratings yet
- Fundamentals of Flight: A Basic Introduction To AerodynamicsDocument52 pagesFundamentals of Flight: A Basic Introduction To AerodynamicsCyril QuintanillaNo ratings yet
- Physics Behind DroneDocument2 pagesPhysics Behind DroneTechie RehanNo ratings yet
- Fundamentals of Flight: A Basic Introduction To AerodynamicsDocument54 pagesFundamentals of Flight: A Basic Introduction To AerodynamicsimannurNo ratings yet
- Fundamentals of Flight: A Basic Introduction To AerodynamicsDocument54 pagesFundamentals of Flight: A Basic Introduction To AerodynamicsSwapnil DeoreNo ratings yet
- Chapter 2 - AerospaceDocument36 pagesChapter 2 - AerospaceNuqman ZamzamNo ratings yet
- Fight Theory PDFDocument14 pagesFight Theory PDFabdalgalil mahdiNo ratings yet
- Tesina CompleteDocument25 pagesTesina CompleteJose VarelaNo ratings yet
- How Can Helicopter Fly: GeneralDocument31 pagesHow Can Helicopter Fly: GeneralBrandon Red BaronNo ratings yet
- Design and Development of An Y4 Copter C PDFDocument6 pagesDesign and Development of An Y4 Copter C PDFإبراهام لنكولنNo ratings yet
- Basics of Flight DynamicsDocument160 pagesBasics of Flight Dynamicsnmsrinm100% (2)
- Professional Answer For A 12-Mark QuestionDocument16 pagesProfessional Answer For A 12-Mark QuestionSatyanarayana MaharanaNo ratings yet
- Aerodynamics of FlightDocument13 pagesAerodynamics of FlightBobNo ratings yet
- Section b3 and CDocument7 pagesSection b3 and Camhm2000No ratings yet
- How Do Airplanes Fly?: Lift Gravity Thrust DragDocument5 pagesHow Do Airplanes Fly?: Lift Gravity Thrust DragEstifanosNo ratings yet
- Ab Initio CPLDocument20 pagesAb Initio CPLRay MarcellinoNo ratings yet
- Lift Theory DescriptionDocument6 pagesLift Theory Descriptionmangvic07No ratings yet
- Sec. 2.2 Theory of FlightDocument22 pagesSec. 2.2 Theory of Flightbenanthony_bagalihogNo ratings yet
- Model aeroplanes: The building of model monoplanes, biplanes, etc., together with a chapter on building a model airshipFrom EverandModel aeroplanes: The building of model monoplanes, biplanes, etc., together with a chapter on building a model airshipNo ratings yet
- Modeling of Complex Systems: Application to Aeronautical DynamicsFrom EverandModeling of Complex Systems: Application to Aeronautical DynamicsNo ratings yet
- TOYOTA AJUSA прокладкиDocument74 pagesTOYOTA AJUSA прокладкиВиктор МушкинNo ratings yet
- Deutz 620 Series SpecificationsDocument6 pagesDeutz 620 Series SpecificationsNaveen ChaudharyNo ratings yet
- GATE Aero-Propulsion by IGCDocument256 pagesGATE Aero-Propulsion by IGCParth PatelNo ratings yet
- 4 Motor 4G1 MitsubishiDocument96 pages4 Motor 4G1 Mitsubishijasson meloNo ratings yet
- Vasant Square Hub Charger Details - Ph-3Document3 pagesVasant Square Hub Charger Details - Ph-3Prince RanaNo ratings yet
- Group 3 - Aerodynamics AssignmentDocument14 pagesGroup 3 - Aerodynamics Assignmentmuhammad izharNo ratings yet
- Numerical Calculation of Nonlinear Aerodynamics of Wing-Body ConfigurationsDocument9 pagesNumerical Calculation of Nonlinear Aerodynamics of Wing-Body ConfigurationsANANTHA KRISHNAN O MNo ratings yet
- Quotation - New Tech BangloreDocument8 pagesQuotation - New Tech BangloreakshayNo ratings yet
- Chapter 3Document5 pagesChapter 3rmonta rmontaNo ratings yet
- Isuzu-REDTech-6U-Lit-Sheet Motor de La LB 460Document2 pagesIsuzu-REDTech-6U-Lit-Sheet Motor de La LB 460Diego martinez castellanosNo ratings yet
- Evaluating Electric Vehicle MarketDocument19 pagesEvaluating Electric Vehicle Marketle an haiNo ratings yet
- L21-22 Hypersonic PropulsionDocument34 pagesL21-22 Hypersonic PropulsionrajinisivNo ratings yet
- Qsk60 Mcrs k135 4 Familiarización E-Learning Clase 4Document34 pagesQsk60 Mcrs k135 4 Familiarización E-Learning Clase 4Amaya RomeroNo ratings yet
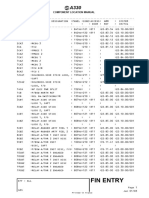
- Fin EntryDocument61 pagesFin Entry225248No ratings yet
- 2.introduction of Accent EngineDocument22 pages2.introduction of Accent EngineMusa TandiarrangNo ratings yet
- SummarypsvDocument43 pagesSummarypsvKhaldon ThakerNo ratings yet
- ICE (CH 1)Document41 pagesICE (CH 1)xyonieNo ratings yet
- Wind Speed Monitoring Log Sheet: Towers 5,6&7Document1 pageWind Speed Monitoring Log Sheet: Towers 5,6&7vinayNo ratings yet
- Flight Performance PaperDocument14 pagesFlight Performance Paperzay107No ratings yet
- Wind Tunnel AnalysisDocument24 pagesWind Tunnel AnalysisVenkitaraj K PNo ratings yet
- Turbomachinery AerodynamicsDocument2 pagesTurbomachinery AerodynamicsBaskar SelvarajNo ratings yet
- 6BT5.9-C (CPR253)Document2 pages6BT5.9-C (CPR253)Dennis K ThomasNo ratings yet
- What Is The Relationship Between The Angular Velocity of A Fixed Tri-Blade Propeller and The Lift FoDocument12 pagesWhat Is The Relationship Between The Angular Velocity of A Fixed Tri-Blade Propeller and The Lift FoMM DomìN8RNo ratings yet
- Amt 1102 Midterm Learning Module 4Document14 pagesAmt 1102 Midterm Learning Module 4Cielito CaguiaNo ratings yet
- Mercruiser BellowsDocument11 pagesMercruiser BellowsJSMarine Parts ChinaNo ratings yet
- COOK Natalia ThesisDocument74 pagesCOOK Natalia ThesisIIEC pulchowkNo ratings yet
- A Design Method For Supersonic Transport WingsDocument11 pagesA Design Method For Supersonic Transport Wings李子木No ratings yet
- Chapter 1 Introduction SHGDocument41 pagesChapter 1 Introduction SHGYOSEF LAKEWNo ratings yet
- Power Plant (CFM56)Document21 pagesPower Plant (CFM56)Jefferson CuNo ratings yet
- PoF 15 High Speed Aerodynamics IDocument43 pagesPoF 15 High Speed Aerodynamics IglorfindelptNo ratings yet