Download as pdf or txt
You might also like
- 21-Light Remote Annunciator: Owner's ManualDocument12 pages21-Light Remote Annunciator: Owner's ManualpicoucrNo ratings yet
- CSS NC 2 Session Plan Coc2Document11 pagesCSS NC 2 Session Plan Coc2Ralfh Pescadero De Guzman100% (7)
- Refactoring Improving The Design of Exis PDFDocument3 pagesRefactoring Improving The Design of Exis PDFDany Feliz0% (1)
- 3 Axis TB6560 CNC Driver Board Users ManualDocument13 pages3 Axis TB6560 CNC Driver Board Users ManualJoão Luis Paiva JuniorNo ratings yet
- HDC24xx Datasheet RoboteqDocument13 pagesHDC24xx Datasheet Roboteqluismena09051982No ratings yet
- M542Document3 pagesM542xhaneriNo ratings yet
- BLN 95 9041Document5 pagesBLN 95 9041marsh2002No ratings yet
- Description Power Range: Analog Servo DriveDocument7 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- Vehicle Speed Control System Using RF CommunicationDocument20 pagesVehicle Speed Control System Using RF CommunicationRaina John100% (2)
- Infineon - Brochure - Motor ControlDocument42 pagesInfineon - Brochure - Motor ControlRyan AngelesNo ratings yet
- MD2278 DDocument3 pagesMD2278 Dhoangmanh1989No ratings yet
- 1/3, 1/4-Duty General-Purpose LCD Display Driver: Cmos IcDocument35 pages1/3, 1/4-Duty General-Purpose LCD Display Driver: Cmos IcOsama YaseenNo ratings yet
- M0000528 Inst200 Ing v1.6Document84 pagesM0000528 Inst200 Ing v1.6Farzad SagharchiNo ratings yet
- Description Power Range: Analog Servo DriveDocument7 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- 73M2921 Advanced Single Chip Modem: Description FeaturesDocument42 pages73M2921 Advanced Single Chip Modem: Description FeaturesRicardo MercadoNo ratings yet
- C100 CatalogDocument20 pagesC100 CatalogMarcela RoneNo ratings yet
- MSP430Document48 pagesMSP430abab74No ratings yet
- E Tended Environment: Analog Servo DriveDocument8 pagesE Tended Environment: Analog Servo DriveElectromateNo ratings yet
- Microchip Motor ControlDocument16 pagesMicrochip Motor ControlOctavio AsNo ratings yet
- Description Power Range: Analog Servo DriveDocument8 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- Description Power Range: Analog Servo DriveDocument8 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- Power Electronics - Kits PDFDocument31 pagesPower Electronics - Kits PDFGaganVishwakarmaNo ratings yet
- Azbh 12 A 8Document8 pagesAzbh 12 A 8ElectromateNo ratings yet
- Description Power Range: Analog Servo DriveDocument7 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- User'S Manual: JULY, 2015Document12 pagesUser'S Manual: JULY, 2015Mudassar RafiqNo ratings yet
- IR Radar With Laser Shoot - SYNOPSISDocument11 pagesIR Radar With Laser Shoot - SYNOPSISashishkvianNo ratings yet
- Description Power Range: Analog Servo DriveDocument7 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- Led Driver CatalogDocument13 pagesLed Driver CatalogarieldaviNo ratings yet
- LPD6803 DatasheetDocument5 pagesLPD6803 Datasheetarno529No ratings yet
- A4988 DatasheetDocument20 pagesA4988 DatasheetJose OnoNo ratings yet
- Isel ControlerDocument18 pagesIsel Controlermihail91smNo ratings yet
- Current Dc3iobDocument14 pagesCurrent Dc3iobsunhuynhNo ratings yet
- Choosing Enclosed Control Adjustable Frequency Drive OptionsDocument4 pagesChoosing Enclosed Control Adjustable Frequency Drive OptionsgarcogiazNo ratings yet
- Description Power Range: Analog Servo DriveDocument8 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- DC Output Modules: D4-32TD1-1 DC Output D4-32TD2 DC OutputDocument6 pagesDC Output Modules: D4-32TD1-1 DC Output D4-32TD2 DC Outputmushahid980No ratings yet
- Pic Servo SCDocument51 pagesPic Servo SCFvck Ccp100% (1)
- MSP430C11x1, MSP430F11x1A Mixed Signal Microcontroller: DescriptionDocument43 pagesMSP430C11x1, MSP430F11x1A Mixed Signal Microcontroller: DescriptionHaks HaxNo ratings yet
- 8259ADocument22 pages8259AShafeey RahmanNo ratings yet
- Delta Dvp-Se I Mul 20130208Document20 pagesDelta Dvp-Se I Mul 20130208daocongdablNo ratings yet
- 3 Axis Stepping Motor ControllerDocument15 pages3 Axis Stepping Motor ControllerDumitrescu Constantin OctavianNo ratings yet
- Manual DigitalView SVP-1280Document25 pagesManual DigitalView SVP-1280elotilloNo ratings yet
- Analog Servo Drive: Description Power RangeDocument9 pagesAnalog Servo Drive: Description Power RangeElectromateNo ratings yet
- 16-B D S P A/D C: FeaturesDocument60 pages16-B D S P A/D C: FeatureskrajasekarantutiNo ratings yet
- BlueControl DatasheetDocument3 pagesBlueControl DatasheetSiti Nikmatilah100% (1)
- Pic 16 C 711Document8 pagesPic 16 C 711Michael LiuNo ratings yet
- ID-LA-IsO Series Low Cost RFID Reader Module Used Animal Tagging LF ISO11785Document10 pagesID-LA-IsO Series Low Cost RFID Reader Module Used Animal Tagging LF ISO11785AbleIDLtdNo ratings yet
- Supermodified - Miniature Controller For DC MotorsDocument38 pagesSupermodified - Miniature Controller For DC MotorsGiovanni GambaNo ratings yet
- Pic32 Maxi WebDocument21 pagesPic32 Maxi Webmaroua_ngoura100% (1)
- PIC16F18855 ModDocument662 pagesPIC16F18855 Modwhynot05No ratings yet
- Horner He Xe102jkDocument4 pagesHorner He Xe102jkjcudrisNo ratings yet
- All Motion EZ Stepper Model EZ4AXISDocument60 pagesAll Motion EZ Stepper Model EZ4AXISJohn Melanathy IINo ratings yet
- Android Based Wireless Home AppliancesDocument44 pagesAndroid Based Wireless Home AppliancesShahzad SaifNo ratings yet
- MiniAx User Guide - Issue 1Document37 pagesMiniAx User Guide - Issue 1Control CheckNo ratings yet
- CH 2Document14 pagesCH 2PeterhayatNo ratings yet
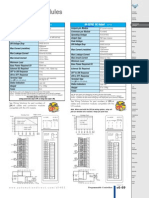
- AC/DC Input and Simulator ModulesDocument6 pagesAC/DC Input and Simulator ModulesInamex-fpVeracruzNo ratings yet
- Description Power Range: Analog Servo DriveDocument7 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Analog Dialogue Volume 46, Number 1: Analog Dialogue, #5From EverandAnalog Dialogue Volume 46, Number 1: Analog Dialogue, #5Rating: 5 out of 5 stars5/5 (1)
- Radio Shack TRS-80 Expansion Interface: Operator's Manual: Catalog Numbers: 26-1140, 26-1141, 26-1142From EverandRadio Shack TRS-80 Expansion Interface: Operator's Manual: Catalog Numbers: 26-1140, 26-1141, 26-1142No ratings yet
- CT2039N Project Preparation Module DI Box Design Report: Group Number: 9Document14 pagesCT2039N Project Preparation Module DI Box Design Report: Group Number: 9tpgulloNo ratings yet
- Rog Nidan Ajay Kumar SharmaDocument555 pagesRog Nidan Ajay Kumar Sharmaveer the robo boy67% (15)
- FTS-161 MS Chrom - 02Document1 pageFTS-161 MS Chrom - 02Daniela SantosNo ratings yet
- Unit I Cs8491Document3 pagesUnit I Cs8491Sheeba KelvinNo ratings yet
- Timing Consideration On A Safety PLCDocument11 pagesTiming Consideration On A Safety PLCerstendrainNo ratings yet
- Case - Group 5 - Rolls Royce ERPDocument15 pagesCase - Group 5 - Rolls Royce ERPMilky Umar BawazierNo ratings yet
- HCI Chapter 4Document46 pagesHCI Chapter 4AschenakiNo ratings yet
- Business-WPS OfficeDocument28 pagesBusiness-WPS OfficeHIKIMNo ratings yet
- A Ship Simulation System For Maritime Education: December 2009Document11 pagesA Ship Simulation System For Maritime Education: December 2009Mori Shan24No ratings yet
- LDCO Poster FormatDocument1 pageLDCO Poster FormatBabaNo ratings yet
- A Graphics Processing UnitDocument14 pagesA Graphics Processing UnitsupermanijakNo ratings yet
- Fortran 77 Relational and Logic OperatorsDocument4 pagesFortran 77 Relational and Logic OperatorsrodwellheadNo ratings yet
- Simantov Judd Uncharted 2 Character PipelineDocument81 pagesSimantov Judd Uncharted 2 Character PipelineJeremy TaborNo ratings yet
- 651Document1 page651Ahmad MustaqimNo ratings yet
- Bluetooth - ATT and GATTDocument11 pagesBluetooth - ATT and GATTViệt ThắngNo ratings yet
- NotebookDocument2 pagesNotebookDielle DeeneNo ratings yet
- CMP2008 L1Document47 pagesCMP2008 L1Abdul QadirNo ratings yet
- 1900 RWTestingDocument18 pages1900 RWTestingShailesh BhanushaliNo ratings yet
- FortiSwitch 124F Series QSGDocument15 pagesFortiSwitch 124F Series QSGfelomino.bacquianoNo ratings yet
- University Institute of Information Technology (UIIT), PMAS-Arid Agriculture University (AAUR), RawalpindiDocument41 pagesUniversity Institute of Information Technology (UIIT), PMAS-Arid Agriculture University (AAUR), RawalpindiShopify SEONo ratings yet
- Electrodermal Act Very ImportantDocument43 pagesElectrodermal Act Very Importantexplorator1No ratings yet
- Lat5 - AlproSa01 (1322001, 1322005, 1322011, 1322015, 1322021, 1322026)Document9 pagesLat5 - AlproSa01 (1322001, 1322005, 1322011, 1322015, 1322021, 1322026)Hikmal Ananta PutraNo ratings yet
- 5571 PCC Release 1 - 7 - 2 Northbound Interface Guide FinalDocument45 pages5571 PCC Release 1 - 7 - 2 Northbound Interface Guide FinalferneyNo ratings yet
- ESP411 2019 Study Guide Rev1Document18 pagesESP411 2019 Study Guide Rev1ShivaaniNo ratings yet
- How To Use The FDISK and FORMAT CommandsDocument26 pagesHow To Use The FDISK and FORMAT CommandsIwel NaganNo ratings yet
- MATH1081 T1 AnswersDocument9 pagesMATH1081 T1 AnswersJames PPDNo ratings yet
- How To Install Automated Signal Set Up For TmnmediDocument16 pagesHow To Install Automated Signal Set Up For TmnmediChristus SharatanNo ratings yet
- RH Central Bank of Brazil Case Study f26354pr 202012 enDocument4 pagesRH Central Bank of Brazil Case Study f26354pr 202012 enpetersonjrNo ratings yet