Download as pdf or txt
You might also like
- Development and Verification of NASA Standard Initiator-2 (NSI-2)Document51 pagesDevelopment and Verification of NASA Standard Initiator-2 (NSI-2)구자춘No ratings yet
- Report On MangalyaanDocument31 pagesReport On MangalyaanAlf tanner50% (6)
- 2002 - NASA - Solar Probe - An Engineering StudyDocument88 pages2002 - NASA - Solar Probe - An Engineering StudymarkessNo ratings yet
- Hybrid Rocket Propulsion DevelopmentDocument15 pagesHybrid Rocket Propulsion Development小林 田中100% (1)
- Electric Propulsion Research and Development at Nasa George SchmidtDocument9 pagesElectric Propulsion Research and Development at Nasa George SchmidtShubhi SNo ratings yet
- Power System of ESMO PDFDocument12 pagesPower System of ESMO PDFharshaxdNo ratings yet
- Feasibility Study of All Electric Propulsion System For 3 Ton Class SatelliteDocument14 pagesFeasibility Study of All Electric Propulsion System For 3 Ton Class SatelliteRavi KiranNo ratings yet
- Nano Satellite OverviewDocument8 pagesNano Satellite Overviewssiddiqi6No ratings yet
- Spacecraft Propulsion SystemsDocument125 pagesSpacecraft Propulsion SystemsMarcus Skookumchuck Vannini100% (2)
- BR 137-1Document13 pagesBR 137-1Rʌĸɘsʜ GɘʜɭotNo ratings yet
- Content ServerDocument10 pagesContent ServerdanielNo ratings yet
- Feasibilityofa Cube Sat GTOmissionDocument13 pagesFeasibilityofa Cube Sat GTOmissionMilad VaheduNo ratings yet
- Satellite Assignment 3Document22 pagesSatellite Assignment 3Amirah ZainalNo ratings yet
- c2 PDFDocument48 pagesc2 PDFSantiago UrgilesNo ratings yet
- Aerospace 06 00108 v2Document38 pagesAerospace 06 00108 v2KrishnaDuttPandeyKdpNo ratings yet
- Electro Magnetic Launch Center: Brief DescriptionDocument4 pagesElectro Magnetic Launch Center: Brief DescriptionKarim OrtizNo ratings yet
- Satellite CommunicationDocument22 pagesSatellite CommunicationAk TiwariNo ratings yet
- In - Space - Deployment - Options - For - Large - Space MechanismsDocument23 pagesIn - Space - Deployment - Options - For - Large - Space Mechanismstomek_zawistowskiNo ratings yet
- Bayer2018 - Europa Clipper Mission Update - Preliminary Design With Selected InstrumentsDocument19 pagesBayer2018 - Europa Clipper Mission Update - Preliminary Design With Selected Instrumentsvivalavaca13No ratings yet
- MEMO Selection Deployment OrbitDocument16 pagesMEMO Selection Deployment OrbitlricccNo ratings yet
- There and Back Again: Presskit NETAPRIL2022Document14 pagesThere and Back Again: Presskit NETAPRIL2022Lok MikNo ratings yet
- 1 s2.0 S009457651730406X MainDocument13 pages1 s2.0 S009457651730406X Mainpemih56484No ratings yet
- Final Baseline PDFDocument282 pagesFinal Baseline PDFPranav CVNo ratings yet
- English ProjectDocument12 pagesEnglish ProjectSoumya SawantNo ratings yet
- Micro CatDocument11 pagesMicro Catnakamurakai0722No ratings yet
- Iac 22c4ipb11x71337Document13 pagesIac 22c4ipb11x71337api-697371756No ratings yet
- Assignment QuestionsDocument1 pageAssignment QuestionsBalaKrishna BattaNo ratings yet
- Chubusat SeriesDocument8 pagesChubusat SeriesFieldartNo ratings yet
- Low Concentration Solar Array Experiment On-Board Proba-2Document6 pagesLow Concentration Solar Array Experiment On-Board Proba-2llmm_088No ratings yet
- TC-493 Satellite Communication Lab ManualDocument46 pagesTC-493 Satellite Communication Lab ManualfaizanumarkhanNo ratings yet
- 161st Ariane Mission Press KitDocument11 pages161st Ariane Mission Press KitAaron MonkNo ratings yet
- Conceptual Design and Analysis of An MXER Tether Boost StationDocument11 pagesConceptual Design and Analysis of An MXER Tether Boost StationSeanNo ratings yet
- Structural Design For A Neptune Aerocapture MissionDocument13 pagesStructural Design For A Neptune Aerocapture Missionjunjie yiNo ratings yet
- Jurnal TD Desti Pusteksat 2021Document12 pagesJurnal TD Desti Pusteksat 2021hamzaNo ratings yet
- Juno Rocket HistoryDocument28 pagesJuno Rocket HistoryAviation/Space History Library100% (2)
- SatellitesDocument18 pagesSatellitesSangita Gomare reddyNo ratings yet
- Attitude and Orbit Control System For The European Student Moon Orbiter (ESMO)Document11 pagesAttitude and Orbit Control System For The European Student Moon Orbiter (ESMO)-wandrian-No ratings yet
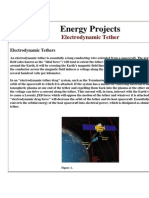
- Energy Projects RiyaDocument13 pagesEnergy Projects RiyaDeepak SinghNo ratings yet
- LEIPOLDDocument6 pagesLEIPOLDkucnicamNo ratings yet
- RoboticDocument6 pagesRoboticIngbor99No ratings yet
- Achieving High-Precision Pointing On Exoplanetsat: Initial Feasibility AnalysisDocument16 pagesAchieving High-Precision Pointing On Exoplanetsat: Initial Feasibility AnalysisMatias LipskerNo ratings yet
- TIGRISAT Orbital MotionSimulation and AnalysisDocument8 pagesTIGRISAT Orbital MotionSimulation and AnalysisMohammad Chessab MahdiNo ratings yet
- SC 2mark Material EditedDocument20 pagesSC 2mark Material EditedvinothNo ratings yet
- Ion PropulsionDocument11 pagesIon PropulsionАзиз ЭркиновNo ratings yet
- Alpha Magnetic SpectrometerDocument9 pagesAlpha Magnetic SpectrometerVrund ParikhNo ratings yet
- Space Physics Program College of Arts & Sciences ERAU-PrescottDocument18 pagesSpace Physics Program College of Arts & Sciences ERAU-PrescottAbhishek YadavNo ratings yet
- IEEE002Document7 pagesIEEE002Alan ValsalanNo ratings yet
- Preliminary Mission Analysis and Orbit Design For Next Mars ExplorationDocument6 pagesPreliminary Mission Analysis and Orbit Design For Next Mars Explorationsandra milena bastos molinaNo ratings yet
- Olsen 2013Document12 pagesOlsen 2013taba.geo89No ratings yet
- Erso Ii-BDocument18 pagesErso Ii-BBob AndrepontNo ratings yet
- Spitzer Space Telescope Mission DesignDocument10 pagesSpitzer Space Telescope Mission DesignBäbÿ ÇhêrrýNo ratings yet
- ESOWG Appendix5 TMT EELTDocument17 pagesESOWG Appendix5 TMT EELTSam HakimNo ratings yet
- Exploring Titan and VenusDocument6 pagesExploring Titan and Venusbooknut1No ratings yet
- (Artificial Satellites) Orbit Design and Simulation For Kufasat NanosatelliteDocument12 pages(Artificial Satellites) Orbit Design and Simulation For Kufasat NanosatelliteSaqib MehdiNo ratings yet
- Space Shuttle Mission STS-46Document59 pagesSpace Shuttle Mission STS-46Aviation/Space History LibraryNo ratings yet
- ESRO II PresskitDocument18 pagesESRO II PresskitBob AndrepontNo ratings yet
- The Tragedy of Mars ObserverDocument6 pagesThe Tragedy of Mars ObserverPedro LeonNo ratings yet
- Manned Mars Landing: Presentation to the Space Task Group - 1969From EverandManned Mars Landing: Presentation to the Space Task Group - 1969No ratings yet
- Auroral Dynamics and Space WeatherFrom EverandAuroral Dynamics and Space WeatherYongliang ZhangNo ratings yet
- Characterization Experiments of Secondary Arcs On Solar Arrays - Threshold and DurationDocument9 pagesCharacterization Experiments of Secondary Arcs On Solar Arrays - Threshold and Duration구자춘No ratings yet
- The Global Morphology of Wave Poynting Flux - Powering The AuroraDocument5 pagesThe Global Morphology of Wave Poynting Flux - Powering The Aurora구자춘No ratings yet
- Solar Array Paddle For The Advanced Land Observing Satellite (ALOS) - Charging Mitigation and VerificationDocument17 pagesSolar Array Paddle For The Advanced Land Observing Satellite (ALOS) - Charging Mitigation and Verification구자춘No ratings yet
- Arcing On Solar Generators by Collection of Ionospheric Plasma CurrentsDocument9 pagesArcing On Solar Generators by Collection of Ionospheric Plasma Currents구자춘No ratings yet
- Spacecraft Charging Studies in Japan (Failure of ADEOS-II)Document29 pagesSpacecraft Charging Studies in Japan (Failure of ADEOS-II)구자춘No ratings yet
- Development of The Next Generation Battery Cell Isolation SwitchDocument6 pagesDevelopment of The Next Generation Battery Cell Isolation Switch구자춘No ratings yet
- Development of The NEA Mini For Low Load ApplicationsDocument6 pagesDevelopment of The NEA Mini For Low Load Applications구자춘No ratings yet
- Development and Verification of NASA Standard Initiator-2 (NSI-2) - AppendixDocument25 pagesDevelopment and Verification of NASA Standard Initiator-2 (NSI-2) - Appendix구자춘No ratings yet
- Cryogenic Temperature Testing of NEA Fuse Wire MechanismDocument6 pagesCryogenic Temperature Testing of NEA Fuse Wire Mechanism구자춘No ratings yet
- A Perfect Bell Shaped Curve (Gaussian Distribution)Document1 pageA Perfect Bell Shaped Curve (Gaussian Distribution)구자춘No ratings yet
- Amptec 601ES Explosive Safety DMM Specifications SheetDocument1 pageAmptec 601ES Explosive Safety DMM Specifications Sheet구자춘No ratings yet
- A Survey of Spacecraft Charging Events On The DMSP Spacecraft in LEODocument6 pagesA Survey of Spacecraft Charging Events On The DMSP Spacecraft in LEO구자춘No ratings yet
- APEM 5000 Series Toggle SwitchesDocument30 pagesAPEM 5000 Series Toggle Switches구자춘No ratings yet
- Amptec 601ES Explosive Safety DMM Operation ManualDocument21 pagesAmptec 601ES Explosive Safety DMM Operation Manual구자춘No ratings yet
- Vdocuments - MX - Space Activity Book SMD Prods3 This Book Belongs To Enjoy Online Space Exploration PDFDocument16 pagesVdocuments - MX - Space Activity Book SMD Prods3 This Book Belongs To Enjoy Online Space Exploration PDFprotoginaNo ratings yet
- Neil Armstrong BiographyDocument5 pagesNeil Armstrong BiographyTrish McAteerNo ratings yet
- Revista HORIZONSjan 07Document24 pagesRevista HORIZONSjan 07Alejo CatafractoNo ratings yet
- Coming Down To EarthDocument1 pageComing Down To EarthalbertoygemmaNo ratings yet
- Satish Reddy (M.S. Mechanical Engineering-1990) Receives Recognition For His Work at NASADocument1 pageSatish Reddy (M.S. Mechanical Engineering-1990) Receives Recognition For His Work at NASAjeansonNo ratings yet
- The Apollo Moon Landing: by Toby HudsonDocument1 pageThe Apollo Moon Landing: by Toby HudsonToby HudsonNo ratings yet
- Exploration Rover Concepts and Development Challenges: NASA Glenn Research Center, Cleveland, Ohio 44135, USADocument23 pagesExploration Rover Concepts and Development Challenges: NASA Glenn Research Center, Cleveland, Ohio 44135, USAdineshNo ratings yet
- WNL NASA Astronaut Scott Kelly On His Year in Space AdvDocument5 pagesWNL NASA Astronaut Scott Kelly On His Year in Space AdvAndrzej0% (1)
- A Webquest For 3Rd Grade Subject: The Solar System Designed By: Mary Madalyn MillerDocument8 pagesA Webquest For 3Rd Grade Subject: The Solar System Designed By: Mary Madalyn Millerapi-335216955No ratings yet
- 4s 2016 Programme 20160428Document24 pages4s 2016 Programme 20160428markooNo ratings yet
- Course Structure - AeroDocument4 pagesCourse Structure - AeroJo EyNo ratings yet
- Kalpana ChawlaDocument6 pagesKalpana ChawlaPrashant KumarNo ratings yet
- LyngsatDocument4 pagesLyngsatHoerul FikriNo ratings yet
- Skylon SpaceplaneDocument5 pagesSkylon SpaceplaneΒαρδίκος ΔημήτρηςNo ratings yet
- NASA Human SystemsDocument40 pagesNASA Human SystemsPablo de LeonNo ratings yet
- What Do You Know About The International Space Station? Why Was It Created? Who Is Creating and Building It? What Is It Like To Live in Space?Document2 pagesWhat Do You Know About The International Space Station? Why Was It Created? Who Is Creating and Building It? What Is It Like To Live in Space?Дарія ЄпіфановаNo ratings yet
- Chinh Thuc Chuyen Anh Eca0729205Document9 pagesChinh Thuc Chuyen Anh Eca0729205sdbw5rgxfgNo ratings yet
- Inflatable Re-Entry Vehicle Experiment (IRVE) - 4 OverviewDocument14 pagesInflatable Re-Entry Vehicle Experiment (IRVE) - 4 OverviewyijunjinNo ratings yet
- GPSDocument9 pagesGPSHanamant NaikawadiNo ratings yet
- Electrodynamic Tether: Presented ByDocument22 pagesElectrodynamic Tether: Presented ByAnketNo ratings yet
- Introduction To The Space AgeDocument16 pagesIntroduction To The Space AgeAnne MillbrookeNo ratings yet
- Moon Landing Thesis StatementDocument8 pagesMoon Landing Thesis Statementbsend5zk100% (2)
- Role Models Activity Sheets PDFDocument8 pagesRole Models Activity Sheets PDFChiril LuncașuNo ratings yet
- Small Satellites - Leonidas Israel Perez PeñaDocument5 pagesSmall Satellites - Leonidas Israel Perez PeñaLeonidas Israel Pérez PeñaNo ratings yet
- UCS Satellite Database 5-1-2021Document1,855 pagesUCS Satellite Database 5-1-2021Luciano HortaNo ratings yet
- 2001: A Space Odyssey: Activity WorksheetsDocument3 pages2001: A Space Odyssey: Activity WorksheetskiritosamaNo ratings yet
- Rocket Propulsion Prof. K. Ramamurthi Department of Mechanical Engineering Indian Institute of Technology, MadrasDocument20 pagesRocket Propulsion Prof. K. Ramamurthi Department of Mechanical Engineering Indian Institute of Technology, MadrasMohd TauqeerNo ratings yet
- Chandrayan 2Document1 pageChandrayan 2Debasish DasNo ratings yet
- Hukum Udara & Angkasa: Oleh: Dr. Anang SetiyawanDocument24 pagesHukum Udara & Angkasa: Oleh: Dr. Anang SetiyawanSamuel Mierza FahmyNo ratings yet