Download as pdf or txt
You might also like
- Crack WiseDocument210 pagesCrack Wisetgrclarke100% (1)
- Thesis - Real-Time Optimization of Cone CrushersDocument68 pagesThesis - Real-Time Optimization of Cone CrushersMr29Ricardo100% (2)
- PreviewDocument24 pagesPreviewOusseini SidibeNo ratings yet
- M S D B C P: Odelling and Imulation of Ynamic Ehaviour in Rushing LantsDocument66 pagesM S D B C P: Odelling and Imulation of Ynamic Ehaviour in Rushing LantsClaudia Belén Cortés RuizNo ratings yet
- Capability PDFDocument158 pagesCapability PDFnull nullNo ratings yet
- FULLTEXT01Document48 pagesFULLTEXT01Sankhadeep BhattacharyyaNo ratings yet
- Modelling and Simulation of Dynamic Behaviour in Crushing PlantDocument66 pagesModelling and Simulation of Dynamic Behaviour in Crushing Plantmas26amin3465No ratings yet
- Well Trajectory Optimization1Document80 pagesWell Trajectory Optimization1SouadHadjadjNo ratings yet
- Predicction of Cone Crusher Performance Considering Linear WearDocument70 pagesPredicction of Cone Crusher Performance Considering Linear WearHector100% (1)
- Zhou Et Al., 2014Document26 pagesZhou Et Al., 2014OrshellNo ratings yet
- Piezoelectric Single Crystal Ultrasonic Transducers For Biomedical ApplicationsDocument26 pagesPiezoelectric Single Crystal Ultrasonic Transducers For Biomedical Applicationsزياد المغبشNo ratings yet
- 174141Document91 pages174141Nasser Abdel RaoufNo ratings yet
- Generation of Electricity Using (Aeroleaf) Wind TreeDocument108 pagesGeneration of Electricity Using (Aeroleaf) Wind Tree39-22-SIVAPRAKASH M-EEENo ratings yet
- HE Niversity of Ueensland: The Application of Wireless Blasting in Sublevel Caving MinesDocument70 pagesHE Niversity of Ueensland: The Application of Wireless Blasting in Sublevel Caving MinesCamila Ordenez OlivaresNo ratings yet
- Nonlinear Isoviscous Behaviour of Compliant Journal BearingsDocument51 pagesNonlinear Isoviscous Behaviour of Compliant Journal BearingsramsebNo ratings yet
- Project ReportDocument15 pagesProject ReportPrakhar AgrawalNo ratings yet
- 2017 Design of Vibration-Sourced Piezoelectric Harvester For Battery Powered Sensor NetworksDocument45 pages2017 Design of Vibration-Sourced Piezoelectric Harvester For Battery Powered Sensor NetworksFarhan AizatNo ratings yet
- Thesis Used OpenfoamDocument171 pagesThesis Used OpenfoamMohdFairuzZakariyaNo ratings yet
- System Thesis PDFDocument4 pagesSystem Thesis PDFykramhiig100% (2)
- Research On Impacts of Mechanical Vibrations On THDocument10 pagesResearch On Impacts of Mechanical Vibrations On TH陳嘉星No ratings yet
- Minerals Engineering: Erik Hulthén, C. Magnus EvertssonDocument8 pagesMinerals Engineering: Erik Hulthén, C. Magnus EvertssonNursultan IliyasNo ratings yet
- Offshore Pipelaying DynamicsDocument150 pagesOffshore Pipelaying DynamicsfredisterikNo ratings yet
- MSC Thesis E.P. Swierstra - Fatigue Assessment in Finite Element AnalysisDocument94 pagesMSC Thesis E.P. Swierstra - Fatigue Assessment in Finite Element Analysislittle_sanNo ratings yet
- Sylvain Ferro NTNU MSC ThesisDocument96 pagesSylvain Ferro NTNU MSC Thesisfreelancer2earnNo ratings yet
- 2008 Annual Report Power Systems Laboratory and High Voltage LaboratoryDocument109 pages2008 Annual Report Power Systems Laboratory and High Voltage LaboratoryandresunNo ratings yet
- Rowsell, Philip J. (1991) The Automatic Optimisation of Drilling Performance. PHD Thesis, University ofDocument204 pagesRowsell, Philip J. (1991) The Automatic Optimisation of Drilling Performance. PHD Thesis, University ofChinedu NwabuezeNo ratings yet
- Engineering Metrology PDFDocument100 pagesEngineering Metrology PDFivanzeabNo ratings yet
- Development of Microfabrication Process For Micro Inductive SensoDocument138 pagesDevelopment of Microfabrication Process For Micro Inductive SensolvrevathiNo ratings yet
- Modeling of Fractured ProducerDocument95 pagesModeling of Fractured ProducerOmar Abdel AzimNo ratings yet
- Hussain SajidDocument175 pagesHussain SajidNavamaniSpNo ratings yet
- Test Method For Performance Evaluation of Abrasive Waterjet CuttingDocument46 pagesTest Method For Performance Evaluation of Abrasive Waterjet CuttingviverefeliceNo ratings yet
- Lucifora Daniel J 201201 MASCDocument398 pagesLucifora Daniel J 201201 MASCCAT MINING SHOVELNo ratings yet
- Corbett Engine 2017Document138 pagesCorbett Engine 2017Medicine NyamboNo ratings yet
- Ping Liu ThesisDocument166 pagesPing Liu ThesisDrOm ChoudharyNo ratings yet
- Ax2014 04Document11 pagesAx2014 04akshay ghorpadeNo ratings yet
- Resources, Conservation and Recycling: Ruan Jujun, Qian Yiming, Xu ZhenmingDocument8 pagesResources, Conservation and Recycling: Ruan Jujun, Qian Yiming, Xu Zhenminglaguna028No ratings yet
- BCA - MCA - Project - Report - TemplateDocument28 pagesBCA - MCA - Project - Report - Templatepornisbad4healthNo ratings yet
- Adaptive Orbital Pipe Welding - Hamidreza LatifiDocument140 pagesAdaptive Orbital Pipe Welding - Hamidreza LatifiTejveer Yadav100% (1)
- Electro-Spark Deposition Machine Design, Physical Controls and Parameter EffectsDocument130 pagesElectro-Spark Deposition Machine Design, Physical Controls and Parameter EffectsAdrian DoruNo ratings yet
- B.Tech Project Report TemplateDocument15 pagesB.Tech Project Report TemplateAnkitNo ratings yet
- Vladimir Mardirosevici 20130917142738Document108 pagesVladimir Mardirosevici 20130917142738Jarek PlaszczycaNo ratings yet
- Vibration Analysis For Predictive Maintenance of A Rotary PumpDocument98 pagesVibration Analysis For Predictive Maintenance of A Rotary PumpK-amine BoudaneNo ratings yet
- Shoureshi Smart Sensor Final Report PDFDocument30 pagesShoureshi Smart Sensor Final Report PDFJay Rameshbhai ParikhNo ratings yet
- Erkenspoot Theuniaxialtensiontest Delftuniversityoftechnologyreport7 01 117 7 May2001Document102 pagesErkenspoot Theuniaxialtensiontest Delftuniversityoftechnologyreport7 01 117 7 May2001Ghssoüb GhssoubNo ratings yet
- Importante para TesisDocument5 pagesImportante para TesisLenny GrauNo ratings yet
- Slod Project 192014005Document23 pagesSlod Project 192014005C.Rajesh ReddyNo ratings yet
- Design Optimization For Power-Supplying The Nodes of WSNs - Master Thesis - Ioannis MandourarakisDocument91 pagesDesign Optimization For Power-Supplying The Nodes of WSNs - Master Thesis - Ioannis MandourarakisIoannis MandourarakisNo ratings yet
- Cutting Mechanics of The Gear Shaping Process: by Andrew KatzDocument137 pagesCutting Mechanics of The Gear Shaping Process: by Andrew KatzM MADYAN HAMDINo ratings yet
- Machine Design Research PaperDocument5 pagesMachine Design Research Papercamhwq6mNo ratings yet
- Numerical Modeling of Supported ExcavationsDocument74 pagesNumerical Modeling of Supported ExcavationsDara HajebiNo ratings yet
- Headbox Slice Opening Arrangement: Läppöppningsmekanism För InloppslådaDocument48 pagesHeadbox Slice Opening Arrangement: Läppöppningsmekanism För InloppslådaPiotr SokolińskiNo ratings yet
- Design of Experiments in Production EngineeringDocument201 pagesDesign of Experiments in Production Engineeringmipuldd100% (3)
- Olivier Experimental 2015Document121 pagesOlivier Experimental 2015CrisMadiRodríguezBarríaNo ratings yet
- Instruments, Measurement Principles and Communication Technologies for Downhole Drilling EnvironmentsFrom EverandInstruments, Measurement Principles and Communication Technologies for Downhole Drilling EnvironmentsNo ratings yet
- High Impulse Voltage and Current Measurement Techniques: Fundamentals – Measuring Instruments – Measuring MethodsFrom EverandHigh Impulse Voltage and Current Measurement Techniques: Fundamentals – Measuring Instruments – Measuring MethodsNo ratings yet
- Residual Life Prediction and Optimal Maintenance Decision for a Piece of EquipmentFrom EverandResidual Life Prediction and Optimal Maintenance Decision for a Piece of EquipmentNo ratings yet
- Modelling of Vibrations of Overhead Line Conductors: Assessment of the TechnologyFrom EverandModelling of Vibrations of Overhead Line Conductors: Assessment of the TechnologyGiorgio DianaNo ratings yet
- High Voltage Measurement Techniques: Fundamentals, Measuring Instruments, and Measuring MethodsFrom EverandHigh Voltage Measurement Techniques: Fundamentals, Measuring Instruments, and Measuring MethodsNo ratings yet
- Ostrich RacingDocument4 pagesOstrich RacingalexmadoareNo ratings yet
- Melsec Iq-F FX5 User's Manual (CC-Link IE)Document150 pagesMelsec Iq-F FX5 User's Manual (CC-Link IE)Dedek HariyadiNo ratings yet
- 16216l5 16494Document2 pages16216l5 16494Saul AlbertoNo ratings yet
- 9 Quick Test: Grammar Tick ( ) A, B, or C To Complete The SentencesDocument3 pages9 Quick Test: Grammar Tick ( ) A, B, or C To Complete The SentencesMaria Guadalupe BedollaNo ratings yet
- WORKSHEET 13.2 Formation of Male Gametes (Spermatogenesis)Document2 pagesWORKSHEET 13.2 Formation of Male Gametes (Spermatogenesis)HUSNA 83100% (1)
- Panasonic Pt-Ew540 Ew540l Ew540d Ew540ld Pt-Ex510 Ex510l Ex510d Ex510ld SMDocument125 pagesPanasonic Pt-Ew540 Ew540l Ew540d Ew540ld Pt-Ex510 Ex510l Ex510d Ex510ld SMTung NguyenNo ratings yet
- Codex - SeasoningDocument17 pagesCodex - SeasoningNadia KaharNo ratings yet
- QuePaper-OCT2018-M.E (Computer) - Sem-IIIDocument4 pagesQuePaper-OCT2018-M.E (Computer) - Sem-IIIpravinhmoreNo ratings yet
- Acknowledgement: Name FacultyDocument23 pagesAcknowledgement: Name FacultySurendra JoshiNo ratings yet
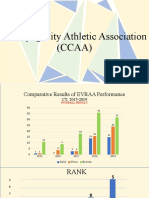
- Calbayog City Athletic Association (CCAA)Document14 pagesCalbayog City Athletic Association (CCAA)LindsayNo ratings yet
- A WatermarkedDocument12 pagesA WatermarkedMaintenanceNo ratings yet
- Cellular AberrationDocument8 pagesCellular AberrationRaymund IdicaNo ratings yet
- Comparative Evaluation of Antibacterial Efficacy.9Document6 pagesComparative Evaluation of Antibacterial Efficacy.9Shivani DubeyNo ratings yet
- Expo-2023-Doha sr10 EngDocument8 pagesExpo-2023-Doha sr10 Engeyad alamreenNo ratings yet
- 201183-B-00-20 Part ListDocument19 pages201183-B-00-20 Part ListMohamed IsmailNo ratings yet
- Sebastien Bouillet Saint Honore TartDocument5 pagesSebastien Bouillet Saint Honore TartMark K.No ratings yet
- Sharp Productivity: Information Technology Reference GuideDocument71 pagesSharp Productivity: Information Technology Reference GuideIticien HitechingNo ratings yet
- Black Body RadiationDocument14 pagesBlack Body RadiationSaif KhanNo ratings yet
- X-Ray For BoneDocument2 pagesX-Ray For BoneLILISNo ratings yet
- Vocabulary: Extra Test QuestionsDocument4 pagesVocabulary: Extra Test QuestionsOctubre DiecisieteNo ratings yet
- Linear Regression Analysis McqsDocument2 pagesLinear Regression Analysis McqsEngr Mujahid Iqbal80% (5)
- Poliquin Ed 3Document198 pagesPoliquin Ed 3Louis Trần100% (1)
- 13 Abdomen Part IDocument12 pages13 Abdomen Part IMonique BorresNo ratings yet
- (Patent) US4915930Document9 pages(Patent) US4915930Pavita SalsabilaNo ratings yet
- L202 AU511 Technical DrawingDocument2 pagesL202 AU511 Technical DrawingghmoralesfNo ratings yet
- Elements of Chemical Reaction Engineering 4th Ed Fogler Solution ManualDocument2 pagesElements of Chemical Reaction Engineering 4th Ed Fogler Solution ManualHafizh IlyasaNo ratings yet
- Reviewer Ftaai 2019 FinalsDocument11 pagesReviewer Ftaai 2019 FinalsDaryl Gordoncillo100% (1)
- Ketone Bodies: DR Anjali SaxenaDocument3 pagesKetone Bodies: DR Anjali Saxenahirendra patelNo ratings yet
- Saa 11Document184 pagesSaa 11jcch1969No ratings yet
- Aglow International Gods-LoveDocument5 pagesAglow International Gods-LoveRolwynloboNo ratings yet