Download as pdf or txt
You might also like
- Artificial IntelligenceDocument15 pagesArtificial IntelligenceloweyiNo ratings yet
- Spectral Audio Signal ProcessingDocument9 pagesSpectral Audio Signal ProcessingA. Villa0% (1)
- ANSYS Workbench LS-DYNA Users InstructionsDocument47 pagesANSYS Workbench LS-DYNA Users InstructionsNenad Nestorovic100% (1)
- Power DissipationDocument23 pagesPower DissipationVidhya DsNo ratings yet
- Mosfet (Metal Oxide Semiconductor Field Effect Transitor) : ElektronikaDocument20 pagesMosfet (Metal Oxide Semiconductor Field Effect Transitor) : ElektronikaIrfan AlfandyNo ratings yet
- The Inverter The Inverter: ReferencesDocument124 pagesThe Inverter The Inverter: Referencessalman1992No ratings yet
- CD4093BM/CD4093BC Quad 2-Input NAND Schmitt Trigger: General DescriptionDocument6 pagesCD4093BM/CD4093BC Quad 2-Input NAND Schmitt Trigger: General DescriptionCristian MorenoNo ratings yet
- CD 4013Document6 pagesCD 4013sprengerNo ratings yet
- R3132 DatasheetDocument19 pagesR3132 Datasheetmvw7nqzfj6100% (1)
- LTC8205ADocument8 pagesLTC8205AChispi LoudenNo ratings yet
- Csa PDFDocument79 pagesCsa PDFAniruddh SharmaNo ratings yet
- CMOS Inverter: Ankur R ChangelaDocument25 pagesCMOS Inverter: Ankur R ChangelaAnkur PatelNo ratings yet
- Datasheet - MM5453N - Display Liquid Crystal DriverDocument8 pagesDatasheet - MM5453N - Display Liquid Crystal DriverSIELAB C.A.No ratings yet
- Lecture 6Document25 pagesLecture 6Ali MustafaNo ratings yet
- CD4016Document8 pagesCD4016api-3708997100% (1)
- LD1010DDocument5 pagesLD1010DJelatang KalapiahNo ratings yet
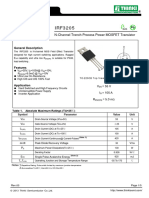
- IRF3205Document5 pagesIRF3205allan joel puente salomonNo ratings yet
- Advanced Power Electronics Corp.: AP85T03GH/JDocument6 pagesAdvanced Power Electronics Corp.: AP85T03GH/JDimitri FrancoNo ratings yet
- Transistor - MRF151GDocument9 pagesTransistor - MRF151Gjuan carlos lopezNo ratings yet
- 70L02GHDocument8 pages70L02GHJtzabalaNo ratings yet
- FALLSEM2020-21 ECE3002 ETH VL2020210102012 Reference Material I 07-Sep-2020 Power Dissipation 8Document22 pagesFALLSEM2020-21 ECE3002 ETH VL2020210102012 Reference Material I 07-Sep-2020 Power Dissipation 8SMNo ratings yet
- CD4024BC 7-Stage Ripple Carry Binary Counter: General Description FeaturesDocument6 pagesCD4024BC 7-Stage Ripple Carry Binary Counter: General Description FeaturesGoodLookingPirateNo ratings yet
- Datasheet 4066 AnalogSwitchDocument8 pagesDatasheet 4066 AnalogSwitchSara DiSuNo ratings yet
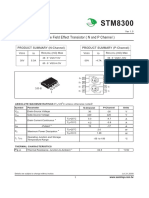
- Data Sheet: N-Channel Enhancement Mode Vertical D-MOS TransistorDocument8 pagesData Sheet: N-Channel Enhancement Mode Vertical D-MOS TransistorRomário CaribéNo ratings yet
- Features: WWW - Lgesem IDocument2 pagesFeatures: WWW - Lgesem Izigmund zigmundNo ratings yet
- Lecture 5Document29 pagesLecture 5AlaaNo ratings yet
- CD4030M/CD4030C Quad EXCLUSIVE-OR Gate: General Description ApplicationsDocument4 pagesCD4030M/CD4030C Quad EXCLUSIVE-OR Gate: General Description ApplicationsSuper WhippedNo ratings yet
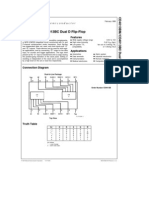
- CD4027BM/CD4027BC Dual J-K Master/Slave Flip-Flop With Set and ResetDocument8 pagesCD4027BM/CD4027BC Dual J-K Master/Slave Flip-Flop With Set and ResetHaekal Al GhifaryNo ratings yet
- 2 SJ 117Document3 pages2 SJ 117Nacho ConsolaniNo ratings yet
- Relay Drive, Motor Drive and DC DC Converter Application: Absolute Maximum RatingsDocument6 pagesRelay Drive, Motor Drive and DC DC Converter Application: Absolute Maximum Ratingszay kungNo ratings yet
- ELEC 252: Introduction To ElectronicsDocument16 pagesELEC 252: Introduction To ElectronicsharshNo ratings yet
- 2 Bts121aDocument10 pages2 Bts121aharitsah miftaNo ratings yet
- LCD Ie h1602bDocument14 pagesLCD Ie h1602bTahir SapsalNo ratings yet
- HCF4077B: Quad Exclusive Nor GateDocument7 pagesHCF4077B: Quad Exclusive Nor GateGoodLookingPirateNo ratings yet
- AP 40T03GP - Advandced Power Electronic CorpDocument4 pagesAP 40T03GP - Advandced Power Electronic CorpStevenNo ratings yet
- ap65sl380diDocument8 pagesap65sl380diMarco Antonio RomeroNo ratings yet
- Advanced Power Electronics Corp.: AP85U03GHDocument5 pagesAdvanced Power Electronics Corp.: AP85U03GHRamon JSNo ratings yet
- Dual Enhancement Mode Field Effect Transistor (N and P Channel)Document11 pagesDual Enhancement Mode Field Effect Transistor (N and P Channel)BubunGuchhaitNo ratings yet
- EMT 182 Analog Electronic I: Basic Field Effect Transistors AmplifiersDocument34 pagesEMT 182 Analog Electronic I: Basic Field Effect Transistors AmplifiersHaryaniSyafikaNo ratings yet
- 9T16GH MOSFET CANAL N SMDDocument4 pages9T16GH MOSFET CANAL N SMDVictorManuelBernalBlancoNo ratings yet
- Advanced Power Electronics Corp.: DescriptionDocument6 pagesAdvanced Power Electronics Corp.: DescriptionMaugrys CastilloNo ratings yet
- Advanced Power Electronics Corp.: DescriptionDocument6 pagesAdvanced Power Electronics Corp.: DescriptionMaugrys CastilloNo ratings yet
- Advanced Power Electronics Corp.: DescriptionDocument6 pagesAdvanced Power Electronics Corp.: DescriptionMaugrys CastilloNo ratings yet
- DatasheetDocument7 pagesDatasheetmohd FaidzalNo ratings yet
- CD4007M/CD4007C Dual Complementary Pair Plus Inverter: General Description FeaturesDocument6 pagesCD4007M/CD4007C Dual Complementary Pair Plus Inverter: General Description FeaturesjonvoidNo ratings yet
- SEL 4283 Analog CMOS IC Design Single Stage Amplifiers: Small Signal Model 1Document52 pagesSEL 4283 Analog CMOS IC Design Single Stage Amplifiers: Small Signal Model 1jitendraNo ratings yet
- CN48N78 Power MosfetDocument6 pagesCN48N78 Power MosfetAbbas MaghazehiNo ratings yet
- Mosfet (70t03gh)Document4 pagesMosfet (70t03gh)Allan Souza SantanaNo ratings yet
- AO4828 Dual N-Channel Enhancement Mode Field Effect TransistorDocument4 pagesAO4828 Dual N-Channel Enhancement Mode Field Effect TransistorquangNo ratings yet
- Datasheet 5Document3 pagesDatasheet 5Nhat TruongNo ratings yet
- Advanced Power Electronics Corp.: AP9990GH-HFDocument4 pagesAdvanced Power Electronics Corp.: AP9990GH-HFDavid Alberto Lotero AlvarezNo ratings yet
- CD40106BC Hex Schmitt Trigger: General Description FeaturesDocument6 pagesCD40106BC Hex Schmitt Trigger: General Description FeaturesHABUMUGISHA DieudonneNo ratings yet
- Advanced Power Electronics Corp.: DescriptionDocument6 pagesAdvanced Power Electronics Corp.: DescriptionanonbeatNo ratings yet
- G12864F LCD Module ManualDocument29 pagesG12864F LCD Module ManualHEINERTH ROMERO MACASNo ratings yet
- Lecture 24Document5 pagesLecture 24Samreen SiddiquiNo ratings yet
- TC4538BP/TC4538BF Dual Precision Retriggerable/Resettable Monostable MultivibratorDocument9 pagesTC4538BP/TC4538BF Dual Precision Retriggerable/Resettable Monostable MultivibratorAmirNo ratings yet
- Chopper Regulator, DC DC Converter and Motor Drive ApplicationsDocument6 pagesChopper Regulator, DC DC Converter and Motor Drive ApplicationsDJORJENo ratings yet
- HCF4081B: Quad 2 Input and GateDocument7 pagesHCF4081B: Quad 2 Input and GateGoodLookingPirateNo ratings yet
- DJR 0417Document9 pagesDJR 0417ytnateNo ratings yet
- 2N7000 PDFDocument12 pages2N7000 PDFSaulo Isai Serrano VegaNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- How To Calculate A DC-DC Compensation Network - Electronic DesignDocument20 pagesHow To Calculate A DC-DC Compensation Network - Electronic DesignA. VillaNo ratings yet
- Microwaves&RF 1021Document36 pagesMicrowaves&RF 1021A. VillaNo ratings yet
- Capacitors For RF ApplicationsDocument21 pagesCapacitors For RF ApplicationsA. VillaNo ratings yet
- BER Test Method Uses Real DataDocument3 pagesBER Test Method Uses Real DataA. VillaNo ratings yet
- Remote Optical Detection of Alpha RadiationDocument6 pagesRemote Optical Detection of Alpha RadiationA. VillaNo ratings yet
- Inductance Coefficients of SolenoidsDocument33 pagesInductance Coefficients of SolenoidsA. VillaNo ratings yet
- Pulsed Load Modulation (PLM)Document19 pagesPulsed Load Modulation (PLM)A. VillaNo ratings yet
- X-Band Solid State Power Amplifier (SSPA)Document2 pagesX-Band Solid State Power Amplifier (SSPA)A. VillaNo ratings yet
- Designing Multi-Stage Class C Amplifiers For Pulsed Radar ApplicationsDocument8 pagesDesigning Multi-Stage Class C Amplifiers For Pulsed Radar ApplicationsA. VillaNo ratings yet
- Mathematics of The Discrete Fourier Transform (DFT) With Audio ApplicationsDocument5 pagesMathematics of The Discrete Fourier Transform (DFT) With Audio ApplicationsA. VillaNo ratings yet
- More Ebooks at Https://telegram - Me/unacademyplusdiscountsDocument473 pagesMore Ebooks at Https://telegram - Me/unacademyplusdiscountsKhushi YadavNo ratings yet
- 3D TransformationDocument73 pages3D TransformationEr RishabNo ratings yet
- ÃÖÁ - Power System - 190603 - PAGE - Àú¿ë ®Document12 pagesÃÖÁ - Power System - 190603 - PAGE - Àú¿ë ®Oppa SojuNo ratings yet
- Trig FunctionsDocument6 pagesTrig FunctionsJunaidNo ratings yet
- Paste This Code in Your Text-Editor and Save With - ExtensionDocument9 pagesPaste This Code in Your Text-Editor and Save With - Extensionaldi iskandarNo ratings yet
- 1 Data Sheet - M Series - m030 - MA1-CE 7.25Document2 pages1 Data Sheet - M Series - m030 - MA1-CE 7.25Manickam ThanneermalaiNo ratings yet
- Sedemac gc1200 002 Manual For gc1200 ControllersDocument75 pagesSedemac gc1200 002 Manual For gc1200 ControllersKrishnakumar GanesanNo ratings yet
- 2D Transformations and Homogeneous Coordinates: DR Nicolas HolzschuchDocument25 pages2D Transformations and Homogeneous Coordinates: DR Nicolas HolzschuchNirmalya SethNo ratings yet
- Non-Linear Analysis Models For Composite Plate Shear Walls-ConcreteDocument14 pagesNon-Linear Analysis Models For Composite Plate Shear Walls-ConcreteHamid GoodarziNo ratings yet
- Aspen HYSYS - Steady States and Dynamic Simulator (EG Plant Exercise) PDFDocument10 pagesAspen HYSYS - Steady States and Dynamic Simulator (EG Plant Exercise) PDFtuan.huu2007No ratings yet
- Algoritmo Floyd WarshallDocument3 pagesAlgoritmo Floyd WarshallmcgeraldNo ratings yet
- Basic Allied Health Statistics and AnalysisDocument289 pagesBasic Allied Health Statistics and AnalysisAlaa Abu AishehNo ratings yet
- OHEDocument8 pagesOHEMohammad Zakir50% (2)
- All Units Java HandwrittenDocument195 pagesAll Units Java Handwrittenpankaj patil100% (2)
- Chemistry PG 2015 Admn On05sept2015Document96 pagesChemistry PG 2015 Admn On05sept2015ZiyadNo ratings yet
- Lecture24 25 SubnettingDocument46 pagesLecture24 25 SubnettingFiroz kumar100% (2)
- Class 8 CH 5 Data Handling August 19Document3 pagesClass 8 CH 5 Data Handling August 19shayn budihardjoNo ratings yet
- Sampa Axle Rod CatalogueDocument189 pagesSampa Axle Rod CatalogueFabio OchoaNo ratings yet
- Esmm390 410S182Document2 pagesEsmm390 410S182Mulcue ProfeNo ratings yet
- CLASS - IX Mathematics (Co-Ordinate Geometry) : Material Downloaded From - 1 / 7Document7 pagesCLASS - IX Mathematics (Co-Ordinate Geometry) : Material Downloaded From - 1 / 7Neerraj YadavNo ratings yet
- Data Analytics Assignment 1Document11 pagesData Analytics Assignment 1RADHIKA CHANDAKNo ratings yet
- Gautam Ashram - WikipediaDocument4 pagesGautam Ashram - WikipediaSantosh ChaudharyNo ratings yet
- What Is DbiDocument4 pagesWhat Is Dbim-rasheedNo ratings yet
- Cubieboard Serial Conection TTLDocument4 pagesCubieboard Serial Conection TTLsaladfingers8989No ratings yet
- Chapter9 Mathlinks8 UnitplanDocument10 pagesChapter9 Mathlinks8 Unitplanapi-271785617No ratings yet
- Ams04 BaliDocument6 pagesAms04 BaliVesko IlijaziNo ratings yet
- RospDocument55 pagesRospZoroNo ratings yet