Download as pdf or txt
You might also like
- Pinout Diagramas PCM 154 Pines Cruze 1.6 1.8 2.0 2012-2015Document20 pagesPinout Diagramas PCM 154 Pines Cruze 1.6 1.8 2.0 2012-2015Golf variant Pineapple100% (10)
- Hyundai HL770-9a Spare Parts ManualDocument647 pagesHyundai HL770-9a Spare Parts ManualOdrzavanje MPEU100% (5)
- Marie Jahoda - Marienthal - The Sociography of An Unemployed Community-Routledge (2002)Document177 pagesMarie Jahoda - Marienthal - The Sociography of An Unemployed Community-Routledge (2002)Vic VilNo ratings yet
- PLE RubricDocument1 pagePLE RubricCara CaseNo ratings yet
- NASA PowerDocument24 pagesNASA PowerPrathune KailashNo ratings yet
- Modular Stirling Radioisotope Generator: NASA/TM-2016-218911 AIAA-2015-3809Document18 pagesModular Stirling Radioisotope Generator: NASA/TM-2016-218911 AIAA-2015-3809tulzafoundationNo ratings yet
- Overview of The Development and Mission Application of The Advanced Electric Propulsion System (AEPS)Document24 pagesOverview of The Development and Mission Application of The Advanced Electric Propulsion System (AEPS)SOURAV GHIMIREYNo ratings yet
- Application of NiTi in Jet EngineDocument17 pagesApplication of NiTi in Jet Engineswaminathan G.No ratings yet
- Nasa CC3Document332 pagesNasa CC3esra kadriye akgülNo ratings yet
- Paper 01 - Control DesignDocument20 pagesPaper 01 - Control Designnafayzaman03No ratings yet
- Predicting Unreinforced Fabric Mechanical N210023708Document26 pagesPredicting Unreinforced Fabric Mechanical N210023708skr2010No ratings yet
- Development of A Thermal Management System For Electrifi Ed AircraftDocument36 pagesDevelopment of A Thermal Management System For Electrifi Ed AircraftCiro Pascarella PrimoNo ratings yet
- Stirling Convertor Control For A Concept Rover at NASA Glenn Research CenterDocument20 pagesStirling Convertor Control For A Concept Rover at NASA Glenn Research Center강태욱No ratings yet
- NASA Feasibility of Electrified PropulsionDocument100 pagesNASA Feasibility of Electrified Propulsionmcdllv levozz lmdnapNo ratings yet
- Evaluation of An Outer Loop Retrofit Architecture For Intelligent Turbofan Engine Thrust ControlDocument34 pagesEvaluation of An Outer Loop Retrofit Architecture For Intelligent Turbofan Engine Thrust ControlwilliamNo ratings yet
- Nasa - TVTDocument32 pagesNasa - TVTluisNo ratings yet
- Dynamic Open-Rotor Composite Shield Impact Test Report: NASA/TM-2015-218811 DOT/FAA/TC-15/22Document68 pagesDynamic Open-Rotor Composite Shield Impact Test Report: NASA/TM-2015-218811 DOT/FAA/TC-15/22saydamNo ratings yet
- TURBOMAT: A Probabilistic Turbomachinery Aeroelastic Analysis ToolDocument42 pagesTURBOMAT: A Probabilistic Turbomachinery Aeroelastic Analysis Toolcerden1998No ratings yet
- Enhanced Fan Noise Modeling For Turbofan EnginesDocument92 pagesEnhanced Fan Noise Modeling For Turbofan EnginesLi LiNo ratings yet
- A Study of Highly Underexpanded Supersonic Jets N210024918Document20 pagesA Study of Highly Underexpanded Supersonic Jets N210024918skr2010No ratings yet
- Active Combustion Control For Aircraft Gas-Turbine Engines-Experimental Results For An Advanced, Low-Emissions Combustor PrototypeDocument25 pagesActive Combustion Control For Aircraft Gas-Turbine Engines-Experimental Results For An Advanced, Low-Emissions Combustor PrototypeLuca BozziNo ratings yet
- System-Level Control Concepts N210026284Document22 pagesSystem-Level Control Concepts N210026284skr2010No ratings yet
- GRC Supporting Technology For NASA's Advanced Stirling Radioisotope Generator (ASRG)Document19 pagesGRC Supporting Technology For NASA's Advanced Stirling Radioisotope Generator (ASRG)rasoolNo ratings yet
- Component-Level Electronic-Assembly Repair (CLEAR) Spacecraft Circuit Diagnostics by Analog and Complex Signature AnalysisDocument37 pagesComponent-Level Electronic-Assembly Repair (CLEAR) Spacecraft Circuit Diagnostics by Analog and Complex Signature AnalysisasmonovNo ratings yet
- NASA-TM-2012-217252 Full-Scale Turbofan-Engine Turbine-Transfer Function Determination Using Three Internal SensorsDocument20 pagesNASA-TM-2012-217252 Full-Scale Turbofan-Engine Turbine-Transfer Function Determination Using Three Internal SensorsMarek CelNo ratings yet
- Investigation of Exoskeletal Engine Propulsion System ConceptDocument93 pagesInvestigation of Exoskeletal Engine Propulsion System ConceptMir yahyaNo ratings yet
- AD1043317Document22 pagesAD1043317Thakur B PNo ratings yet
- SkyshipDocument22 pagesSkyshipTasko SadikovicNo ratings yet
- Passive Endwall Treatments For Enhancing Stability PDFDocument78 pagesPassive Endwall Treatments For Enhancing Stability PDFSơn HustmanNo ratings yet
- Design and Development of Cubesat Solar Array Deployment Mechanisms Using Shape Memory AlloysDocument20 pagesDesign and Development of Cubesat Solar Array Deployment Mechanisms Using Shape Memory AlloysShoaib IqbalNo ratings yet
- Evaluation of The Oxygen Concentrator Prototypes: Pressure Swing Adsorption Prototype and Electrochemical PrototypeDocument42 pagesEvaluation of The Oxygen Concentrator Prototypes: Pressure Swing Adsorption Prototype and Electrochemical PrototypeAla Ibrahim JalladNo ratings yet
- Practical Techniques For Modeling Gas Turbine Engine PerformanceDocument26 pagesPractical Techniques For Modeling Gas Turbine Engine PerformanceAnu ParthaNo ratings yet
- Intelligent Engine Systems: Adaptive ControlDocument85 pagesIntelligent Engine Systems: Adaptive ControlLee JamesNo ratings yet
- Combined Experimental and Numerical Simulations of Thermal Barrier Coated Turbine Blades ErosionDocument28 pagesCombined Experimental and Numerical Simulations of Thermal Barrier Coated Turbine Blades ErosionmoussaouiNo ratings yet
- CR 2020 220368Document98 pagesCR 2020 220368anthony colozzaNo ratings yet
- Artigo Nasa Sugar VoltDocument233 pagesArtigo Nasa Sugar Voltraphael EliasNo ratings yet
- Ignitor Lox Methane-2.PDF Very GoodDocument28 pagesIgnitor Lox Methane-2.PDF Very GoodGirish UtageNo ratings yet
- Status of Turbulence Modeling For Hypersonic Propu PDFDocument35 pagesStatus of Turbulence Modeling For Hypersonic Propu PDFHRITAM NATHNo ratings yet
- A Theoretical Investigation of Composite Overwrapped Pressure Vessel (COPV) Mechanics Applied To NASA Full Scale TestsDocument28 pagesA Theoretical Investigation of Composite Overwrapped Pressure Vessel (COPV) Mechanics Applied To NASA Full Scale TestsYohannes RegassaNo ratings yet
- NASA-CR-2014-218537 Supersonic Wing Optimization Using SpaRibs - 2014Document31 pagesNASA-CR-2014-218537 Supersonic Wing Optimization Using SpaRibs - 2014Konstantin PredachenkoNo ratings yet
- Final Results For The GRC Supporting Technology Development Project For The 110-Watt Stirling Radioisotope Generator (SRG110)Document24 pagesFinal Results For The GRC Supporting Technology Development Project For The 110-Watt Stirling Radioisotope Generator (SRG110)rasoolNo ratings yet
- NASA Report 2015Document270 pagesNASA Report 2015Wang XiangNo ratings yet
- Revolutionary Propulsion Systems For 21st Century (Sehra Arun K., Shin J.)Document13 pagesRevolutionary Propulsion Systems For 21st Century (Sehra Arun K., Shin J.)tahir sadikovicNo ratings yet
- Sequential Combustion ModelingDocument24 pagesSequential Combustion ModelingAnu ParthaNo ratings yet
- Axial and Centrifugal Compressor Mean Line Flow Analysis MethodDocument38 pagesAxial and Centrifugal Compressor Mean Line Flow Analysis Methodtadele10No ratings yet
- The GE-NASA RTA Hyperburner Design and DevelopmentDocument22 pagesThe GE-NASA RTA Hyperburner Design and DevelopmentSadewo YaktiNo ratings yet
- Gear Tooth Wear Detection Algorithm: NASA/TM-2015-218830Document20 pagesGear Tooth Wear Detection Algorithm: NASA/TM-2015-218830Huseyin CakmakNo ratings yet
- The Role of Radial Clearance On The Performance of Foil Air BearingsDocument19 pagesThe Role of Radial Clearance On The Performance of Foil Air BearingswataruNo ratings yet
- APEX 3D Propeller Test Preliminary Design: NASA/CR-2002-211866Document35 pagesAPEX 3D Propeller Test Preliminary Design: NASA/CR-2002-211866Abrham B. GMNo ratings yet
- NASA GlennICE ModelDocument26 pagesNASA GlennICE Modelecitimo raqinNo ratings yet
- Fan FlutterDocument13 pagesFan FlutterJaiganesh SelvarajNo ratings yet
- Integrated Turbine Tip Clearance and Gas Turbine Engine SimulationDocument24 pagesIntegrated Turbine Tip Clearance and Gas Turbine Engine Simulationmohamad TomcatNo ratings yet
- GT2 Gas TurbineDocument26 pagesGT2 Gas Turbine19BGita Aldostera PHNo ratings yet
- Test Nasa SRDocument27 pagesTest Nasa SRdaniNo ratings yet
- An Investigation of Ionic Wind Propulsion: NASA/TM-2009-215822Document43 pagesAn Investigation of Ionic Wind Propulsion: NASA/TM-2009-215822nekojitaafsprogramNo ratings yet
- Improving Free-Piston Stirling Engine Power Density: NASA/TM-2016-219144Document148 pagesImproving Free-Piston Stirling Engine Power Density: NASA/TM-2016-219144PiotrNo ratings yet
- LINFLUX-AE: A Turbomachinery Aeroelastic Code Based On A 3-D Linearized Euler SolverDocument42 pagesLINFLUX-AE: A Turbomachinery Aeroelastic Code Based On A 3-D Linearized Euler Solvercerden1998No ratings yet
- Development of Experimental Icing Simulation Capability For Full-Scale Swept WingsDocument122 pagesDevelopment of Experimental Icing Simulation Capability For Full-Scale Swept WingsSoumya Ranjan SahooNo ratings yet
- Nasa Axial 35 CFDDocument19 pagesNasa Axial 35 CFDmick.pride81No ratings yet
- TM 2001 210766Document13 pagesTM 2001 210766Shah TufailNo ratings yet
- Modeling Aircraft Wing Loads From Flight Data Using Neural NetworksDocument20 pagesModeling Aircraft Wing Loads From Flight Data Using Neural NetworksPrasath PandianNo ratings yet
- NASAS CR2 Flywheel Generator - 20060028492Document20 pagesNASAS CR2 Flywheel Generator - 20060028492olim owletNo ratings yet
- Hale Uav PDFDocument111 pagesHale Uav PDFhelloyvnNo ratings yet
- Supplier Guidelines - v2 PDFDocument64 pagesSupplier Guidelines - v2 PDFsidNo ratings yet
- Wa0010Document33 pagesWa001020bcs3236 ayush pratap singhNo ratings yet
- Introduction To Color SpacesDocument4 pagesIntroduction To Color Spacesabdullah saifNo ratings yet
- DND InstallationDocument2 pagesDND InstallationYuniar AdiNo ratings yet
- Lenovo Consumer Pricelist May 2015Document6 pagesLenovo Consumer Pricelist May 2015Meyrio SanderwykNo ratings yet
- Kaos PriaDocument133 pagesKaos PriaUrieNo ratings yet
- Presented By: Rahul Kanodia 2010UAR160Document52 pagesPresented By: Rahul Kanodia 2010UAR160Arnav DasaurNo ratings yet
- Accident Report Output - 202211230048 - 2022-11-28 - 01-30-39-PMDocument4 pagesAccident Report Output - 202211230048 - 2022-11-28 - 01-30-39-PMjuyla5479No ratings yet
- CA Assignment QuestionsDocument7 pagesCA Assignment QuestionsShagunNo ratings yet
- Water-Wise Water ParkDocument7 pagesWater-Wise Water Parkapi-353567032No ratings yet
- Curs Foraj Engleza Definitiv PDFDocument236 pagesCurs Foraj Engleza Definitiv PDFGem ALiNo ratings yet
- ACR PSS Orientation For TeachersDocument10 pagesACR PSS Orientation For TeachersLilet PaloNo ratings yet
- Production FunctionDocument6 pagesProduction FunctionshreyNo ratings yet
- G.R. No. 178713 LORENZO SHIPPING CORPORATION, Petitioner, vs. FLORENCIO O. VILLARINDocument4 pagesG.R. No. 178713 LORENZO SHIPPING CORPORATION, Petitioner, vs. FLORENCIO O. VILLARINMark VirayNo ratings yet
- B.Tech / M.tech Lab Report Format For CSE Department, NIT MizoramDocument7 pagesB.Tech / M.tech Lab Report Format For CSE Department, NIT MizoramAaron StoneNo ratings yet
- Digital Image Correlation (DIC) :A Revolution in Engineering MeasurementsDocument44 pagesDigital Image Correlation (DIC) :A Revolution in Engineering MeasurementsyasminaNo ratings yet
- FINAL REPORT Group IIIDocument87 pagesFINAL REPORT Group IIICUSTOMSNo ratings yet
- Sitio PDVSADocument2 pagesSitio PDVSAxgimsrleyNo ratings yet
- Whats New in 1610 and 1710 Release For SAP S4 HANA FinanceDocument9 pagesWhats New in 1610 and 1710 Release For SAP S4 HANA FinanceLokamNo ratings yet
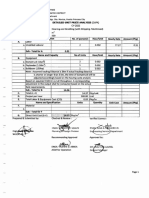
- Clearing and Grubbing (With Stripping - Mechnized)Document1 pageClearing and Grubbing (With Stripping - Mechnized)Pedro PakuNo ratings yet
- AnilineDocument6 pagesAnilineMUHAMMAD AKRAM0% (1)
- MIS Techmax (Searchable)Document64 pagesMIS Techmax (Searchable)hell noNo ratings yet
- Supply Chain ManagementDocument15 pagesSupply Chain ManagementMadhan KumarNo ratings yet
- Basorplast PVC Cable Trays: Installations & UsesDocument15 pagesBasorplast PVC Cable Trays: Installations & UsesDuy Phạm VănNo ratings yet
- Pete The Cat Activity SheetsDocument5 pagesPete The Cat Activity SheetsJeni Zhang67% (9)
- Butuan City Senior High School - Stand AloneDocument2 pagesButuan City Senior High School - Stand Aloneßella DC ReponoyaNo ratings yet