Download as pdf or txt
You might also like
- Naval Shiphandling Capitulo 2Document27 pagesNaval Shiphandling Capitulo 2Felipe IlhaNo ratings yet
- An Explanation of Sail Flow AnalysisDocument10 pagesAn Explanation of Sail Flow Analysiskaltne23100% (1)
- Fluid Mechanics Cengel (Solutions Manual) Chap11-071Document31 pagesFluid Mechanics Cengel (Solutions Manual) Chap11-071NURUL SYUHADA BT ISMAIL HAJAR100% (5)
- Assignments StudentsDocument2 pagesAssignments StudentsManju Chakraborty100% (1)
- Rig Design1Document50 pagesRig Design1Fer VFNo ratings yet
- Narrow Ship Wakes and Wave Drag For Planing HullsDocument5 pagesNarrow Ship Wakes and Wave Drag For Planing HullsMarsel GabrielNo ratings yet
- Computational Analysis of Wind Velocity and Direction Effects On A SailDocument8 pagesComputational Analysis of Wind Velocity and Direction Effects On A Sailval-ovidiu iordacheNo ratings yet
- The Power Necessary To Overcome This Resistance Is Called The) Where: V 0.5144 M/secDocument11 pagesThe Power Necessary To Overcome This Resistance Is Called The) Where: V 0.5144 M/secBharatiyulam100% (1)
- Study of A Boat Hull ShapeDocument5 pagesStudy of A Boat Hull ShapeNobleMathewsNo ratings yet
- Anchor TheoryDocument7 pagesAnchor TheorymadbakingNo ratings yet
- Journee SteeringDocument21 pagesJournee SteeringsorenvinNo ratings yet
- PNA Vol 2 Chapter VI Section 4 PDFDocument7 pagesPNA Vol 2 Chapter VI Section 4 PDFCesar Augusto Carneiro SilvaNo ratings yet
- Squat Manoeuvering - The Nautical InstituteDocument14 pagesSquat Manoeuvering - The Nautical InstituteClaudio MF100% (2)
- Resistance (MA R) 1: The Power Necessary To Overcome This Resistance Is Called The) WhereDocument11 pagesResistance (MA R) 1: The Power Necessary To Overcome This Resistance Is Called The) Wheresupriadi90315No ratings yet
- Habour Chapter 7Document9 pagesHabour Chapter 7josephmuna2023No ratings yet
- Stab 2000Document14 pagesStab 2000KalNo ratings yet
- Calculation of Bottom Clearance Effects On UV HydrodynamicsDocument25 pagesCalculation of Bottom Clearance Effects On UV Hydrodynamicshalcyon304No ratings yet
- Sail Area RatiosDocument5 pagesSail Area RatiostdfsksNo ratings yet
- Fuzzy Control of A SailboatDocument17 pagesFuzzy Control of A SailboatOscarFerrerRibasNo ratings yet
- ZN 13 KornackiDocument5 pagesZN 13 KornackiMarkoNovaselićNo ratings yet
- Executive Summary:: International Maritime OrganizationDocument6 pagesExecutive Summary:: International Maritime OrganizationdarrelsilvaNo ratings yet
- Ship Resistance and PropulsionDocument17 pagesShip Resistance and Propulsionbharathwajamech100% (1)
- Sea Breeze Generated Waves and Coastal MorphologyDocument15 pagesSea Breeze Generated Waves and Coastal Morphologyalbonilla1217No ratings yet
- Journée - Predictoin of The Behaviour of A Ship in SeawayDocument24 pagesJournée - Predictoin of The Behaviour of A Ship in SeawayeNo ratings yet
- Capstan Selection For My VesselDocument4 pagesCapstan Selection For My VesselNelson Aguirre BravoNo ratings yet
- An Introduction To The Physics of WindsurfingDocument17 pagesAn Introduction To The Physics of Windsurfingvspace2000-hkNo ratings yet
- Exp 6, Determination of Impact Against A Flat, Curve and Semispherical SurfaceDocument6 pagesExp 6, Determination of Impact Against A Flat, Curve and Semispherical SurfaceWasi Uddin MahmudNo ratings yet
- Eddy Making ResistanceDocument26 pagesEddy Making ResistanceNaval Siahaan100% (1)
- Ship StressesDocument7 pagesShip StressesSumit Sinha50% (2)
- Added Virtual Mass of Ship LewisDocument27 pagesAdded Virtual Mass of Ship LewisMd. Shahjada TarafderNo ratings yet
- Wind Loads On Post-Panamax Container ShipDocument20 pagesWind Loads On Post-Panamax Container ShipAAANo ratings yet
- Tahanan Kapal (Minggu - 4) : Jurusan Teknik Sistem Perkapalan ITS SurabayaDocument28 pagesTahanan Kapal (Minggu - 4) : Jurusan Teknik Sistem Perkapalan ITS SurabayaErwin Paulian SihombingNo ratings yet
- Bower 1966 The Determination of Cross-Coupling Errors in The Measurement of Gravity at SeaDocument7 pagesBower 1966 The Determination of Cross-Coupling Errors in The Measurement of Gravity at Seaandres pientroNo ratings yet
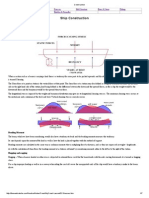
- Ship ConstructionDocument7 pagesShip Constructionpramodkb_cusatNo ratings yet
- Navigation & Voyage Planning Companions: Navigation, Nautical Calculation & Passage Planning CompanionsFrom EverandNavigation & Voyage Planning Companions: Navigation, Nautical Calculation & Passage Planning CompanionsNo ratings yet
- Seam 4 ADocument4 pagesSeam 4 ARoy CamajalanNo ratings yet
- The Measurement of Weight Distribution of Olympic Class Dinghies and KeelboatsDocument32 pagesThe Measurement of Weight Distribution of Olympic Class Dinghies and KeelboatsPeter HinrichsenNo ratings yet
- Tahanan Propulsi - Minggu 3Document28 pagesTahanan Propulsi - Minggu 3WahyuRidhaPratamaNo ratings yet
- Aero-Hydrodynamics of An RS:X Olympic Racing Sailboard:, IncludingDocument18 pagesAero-Hydrodynamics of An RS:X Olympic Racing Sailboard:, IncludingOliwier UrbańskiNo ratings yet
- Waves: Reviewed By: Ivan Lebedev and Yin SoongDocument10 pagesWaves: Reviewed By: Ivan Lebedev and Yin SoongMohan KumarNo ratings yet
- Aerodynamics of A Highly Cambered Airfoil Experimental StudyDocument13 pagesAerodynamics of A Highly Cambered Airfoil Experimental StudyDanish AbbasNo ratings yet
- Tesis FluidsDocument673 pagesTesis Fluidsartimus_2kNo ratings yet
- Met2. Unit 4Document15 pagesMet2. Unit 4asvath sureshNo ratings yet
- CFDLV15 N11 P1 15Document15 pagesCFDLV15 N11 P1 15mabm89No ratings yet
- The Aerodynamic Forces On Airships 1922Document11 pagesThe Aerodynamic Forces On Airships 1922te.iubesc777No ratings yet
- Seam6-Midterms NotesDocument5 pagesSeam6-Midterms NotesOrewa madamada daneNo ratings yet
- Goodyear Marine FendersDocument10 pagesGoodyear Marine FendersIbato RutaNo ratings yet
- Simpson's RulesDocument9 pagesSimpson's RulesZenitsu AgatsumaNo ratings yet
- AnchoringDocument5 pagesAnchoringJavier WalcottNo ratings yet
- CHIEF MATE PHASE 2 Anchoring 10.4 and 10.5Document48 pagesCHIEF MATE PHASE 2 Anchoring 10.4 and 10.5Sudipta Kumar DeNo ratings yet
- CH 4 - Weather RouteingDocument27 pagesCH 4 - Weather Routeing8569yashhiwaraleNo ratings yet
- Section 3 Ship ResponsesDocument23 pagesSection 3 Ship Responsesshayan.rabizadeNo ratings yet
- Mercator Wind Kort EndeligDocument13 pagesMercator Wind Kort EndeligНикита ВеликоцкийNo ratings yet
- Day 4Document7 pagesDay 4MALIK TALHA ALI SAJIDNo ratings yet
- Weather Routeing and Weather Reports-ExternalDocument33 pagesWeather Routeing and Weather Reports-ExternalPL BALASUBRAMANIANNo ratings yet
- Hydrodynamic Transverse Loads On Ships in Deep and Shallow WaterDocument25 pagesHydrodynamic Transverse Loads On Ships in Deep and Shallow WaterJason SmithNo ratings yet
- New Strip Theory Approach To Ship Motions PredictionDocument8 pagesNew Strip Theory Approach To Ship Motions Predictionmichael AnyanwuNo ratings yet
- DL - Kashti.ir - eNBOOKS - Ship Resistance and PropulsionDocument57 pagesDL - Kashti.ir - eNBOOKS - Ship Resistance and PropulsionBasem TamNo ratings yet
- Yacht Lec34 HydrodynamicsDocument66 pagesYacht Lec34 Hydrodynamicsaspoisd100% (1)
- Illustrated Sail & Rig Tuning: Genoa & mainsail trim, spinnaker & gennaker, rig tuningFrom EverandIllustrated Sail & Rig Tuning: Genoa & mainsail trim, spinnaker & gennaker, rig tuningRating: 3.5 out of 5 stars3.5/5 (2)
- Miscellany 51: Apparent Wind Speed and True Wind SpeedFrom EverandMiscellany 51: Apparent Wind Speed and True Wind SpeedNo ratings yet
- Physics PracticalDocument14 pagesPhysics PracticalDebdeep DanNo ratings yet
- Assignment-3: Indian Institute of Technology Bhubaneswar School of InfrastructureDocument2 pagesAssignment-3: Indian Institute of Technology Bhubaneswar School of InfrastructureShipra RajputNo ratings yet
- Module 3 - Geotechengg PDFDocument22 pagesModule 3 - Geotechengg PDFDio LazatinNo ratings yet
- HW w2012 PDFDocument98 pagesHW w2012 PDFedgardiaz5519No ratings yet
- CFD Simulation of A Counter Flow Heat ExchangerDocument22 pagesCFD Simulation of A Counter Flow Heat ExchangerVIRGIL CABALLERONo ratings yet
- JIS B0405-1991 General Tolerances-Part 1 Tolerances For Linear and Angular Dimensions Without Individual Tolerance IndicationsDocument6 pagesJIS B0405-1991 General Tolerances-Part 1 Tolerances For Linear and Angular Dimensions Without Individual Tolerance Indicationsxuanphuong2710No ratings yet
- A Textbook Of: Hemical Ngineering HermodynamicsDocument11 pagesA Textbook Of: Hemical Ngineering HermodynamicsAiswarya RaviNo ratings yet
- On Gas Transport in Downward Slopes of Sewerage Mains: NomenclatureDocument11 pagesOn Gas Transport in Downward Slopes of Sewerage Mains: NomenclaturetranquangtrungxdNo ratings yet
- Practice Paper-1 JEE ADVANCED LEVELDocument6 pagesPractice Paper-1 JEE ADVANCED LEVELAbhinavNo ratings yet
- Basic Electrical Engg. Lab ManualDocument60 pagesBasic Electrical Engg. Lab ManualPRERAK MATHURNo ratings yet
- 003 - Weight-Volume RelationshipDocument29 pages003 - Weight-Volume RelationshipCristina Marie Pegarro AlfaroNo ratings yet
- Park TransformationDocument14 pagesPark TransformationSanjeev Kumar T MNo ratings yet
- UntitledDocument34 pagesUntitledTasnuva HumairaNo ratings yet
- Electromagnetic WavesDocument54 pagesElectromagnetic WavesPortia A. EgkenNo ratings yet
- Fizik 2015 f5 Ppr3 - Skema JawapanDocument4 pagesFizik 2015 f5 Ppr3 - Skema Jawapanputri_latifahNo ratings yet
- Unit Ii Vector Calculus Part-A: Problem 1 SolutionDocument22 pagesUnit Ii Vector Calculus Part-A: Problem 1 SolutionSriram JNo ratings yet
- Kinematics (Teachers)Document33 pagesKinematics (Teachers)Rajiv BiswasNo ratings yet
- Electron Spin and Its History - Eugene D. ComminsDocument27 pagesElectron Spin and Its History - Eugene D. Comminssanjeevsoni64No ratings yet
- States of MatterDocument19 pagesStates of MatterRyan BantidingNo ratings yet
- Practice Sheet 4: Laws of Motion: MG G M G GDocument3 pagesPractice Sheet 4: Laws of Motion: MG G M G GSunil BalaniNo ratings yet
- Sci Q3 WK 1 Day 1 5Document57 pagesSci Q3 WK 1 Day 1 5Whenna Mailom MacahiaNo ratings yet
- The Nuclear AtomDocument25 pagesThe Nuclear Atomnaazim mohamedNo ratings yet
- CBSE 12 Engineering Medical Maths Application of DerivativesDocument91 pagesCBSE 12 Engineering Medical Maths Application of DerivativesPulkit chauhanNo ratings yet
- Vector Differential CalculusDocument28 pagesVector Differential CalculusLAKSHMISH S HEGDENo ratings yet
- Mechanical Engineering - R2015 - Ug FT - Curriculum and SyllabusDocument152 pagesMechanical Engineering - R2015 - Ug FT - Curriculum and SyllabusPrabhaharMuthuswamyNo ratings yet
- What's The Difference Between Torque Mode and Velocity ModeDocument9 pagesWhat's The Difference Between Torque Mode and Velocity Modehidad56195No ratings yet
- CPP 8 Projectile MotionDocument2 pagesCPP 8 Projectile Motionullasagw100% (2)
- Marcet BoilerDocument8 pagesMarcet BoilerOjiSofttouchCharlesNo ratings yet
- DLL Physical ScienceDocument9 pagesDLL Physical ScienceTOt's VinNo ratings yet