
Sname JST 2021 04
Sname JST 2021 04
You might also like
- BS en 856-2015Document22 pagesBS en 856-2015leancalidadNo ratings yet
- Ship Hull AppendageDocument8 pagesShip Hull AppendageMuhamad Nazren Mohamed ZaidiNo ratings yet
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsFrom EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo ratings yet
- 2022-Deisgn of A Disc-Shaped AUH With Stable FinsDocument16 pages2022-Deisgn of A Disc-Shaped AUH With Stable FinsAnh NgoNo ratings yet
- J Ijnaoe 2016 09 010Document8 pagesJ Ijnaoe 2016 09 010Anh NgoNo ratings yet
- Ship Dynamic Intact Stability Focus On Parametric Roll: Technical ReportDocument44 pagesShip Dynamic Intact Stability Focus On Parametric Roll: Technical Reporteacikel78No ratings yet
- Hydrodynamic Shape Optimization of A Hybrid Underwater GliderDocument7 pagesHydrodynamic Shape Optimization of A Hybrid Underwater GliderManh Dien HuynhNo ratings yet
- Ocean Engineering: Applying The PD Controller On The Roll Reduction and Track Keeping For The Ship Advancing in WavesDocument17 pagesOcean Engineering: Applying The PD Controller On The Roll Reduction and Track Keeping For The Ship Advancing in WavesAgung W. WidodoNo ratings yet
- Yutesma 0704, IJEASTDocument5 pagesYutesma 0704, IJEASTFatehsingh parabNo ratings yet
- Paper 1125Document14 pagesPaper 1125famíliafeliz fletesbrumNo ratings yet
- Applied Ocean Research: Yuanyuan Wang, Shuhong Chai, Faisal Khan, Hung Duc NguyenDocument13 pagesApplied Ocean Research: Yuanyuan Wang, Shuhong Chai, Faisal Khan, Hung Duc NguyenMilton AlvaradoNo ratings yet
- Stability Criteria For Sailing Vessels: January 2008Document15 pagesStability Criteria For Sailing Vessels: January 2008Daniel OOWNo ratings yet
- 1 s2.0 S014111872100393X MainDocument13 pages1 s2.0 S014111872100393X Main刘五六No ratings yet
- 2014 Paper Berth Scour Protection For Modern VesselsDocument20 pages2014 Paper Berth Scour Protection For Modern VesselsFelipe Strafite CusterNo ratings yet
- Design Study of Podded Propulsion System For Naval ShipDocument8 pagesDesign Study of Podded Propulsion System For Naval Shippal_malayNo ratings yet
- Dong 2020Document11 pagesDong 2020Anh NgoNo ratings yet
- Piaggio Et Al. - Z-Drive Escort Tug Manoeuvrability Model and SimulationDocument17 pagesPiaggio Et Al. - Z-Drive Escort Tug Manoeuvrability Model and SimulationMaciej ReichelNo ratings yet
- Paper Session 4 Hawks Wood MDocument20 pagesPaper Session 4 Hawks Wood Msea_jazzNo ratings yet
- Elements of Underwater Glider Performance and StabilityDocument28 pagesElements of Underwater Glider Performance and StabilityÍcaro ReisNo ratings yet
- Stabilization of Load's Position in Offshore Cranes: A. Maczyn Ski S. WojciechDocument10 pagesStabilization of Load's Position in Offshore Cranes: A. Maczyn Ski S. WojciechGrant HosieNo ratings yet
- Study On Offloading Operation of Cylindrical FPSO UnderDocument12 pagesStudy On Offloading Operation of Cylindrical FPSO UnderDAN CHAMZNo ratings yet
- Design Toy Submarine Underwater VehicleDocument8 pagesDesign Toy Submarine Underwater VehicleErickson OngNo ratings yet
- Aero-Hydrodynamics of An RS:X Olympic Racing Sailboard:, IncludingDocument18 pagesAero-Hydrodynamics of An RS:X Olympic Racing Sailboard:, IncludingOliwier UrbańskiNo ratings yet
- Design of Passive Anti-Roll Tanks For Roll Stabilization in The Nonlinear RangeDocument16 pagesDesign of Passive Anti-Roll Tanks For Roll Stabilization in The Nonlinear RangeVinay Kumar VarmaNo ratings yet
- OMAE2012 83166FenderModelling SI ReviewDocument10 pagesOMAE2012 83166FenderModelling SI ReviewAung Soe LynnNo ratings yet
- Loveday Design 2006 PDFDocument146 pagesLoveday Design 2006 PDFmukeshmystNo ratings yet
- Advances in Optimization in Yacht Performance AnalDocument9 pagesAdvances in Optimization in Yacht Performance AnalCristian LaiNo ratings yet
- A CFD Study of Hydrodynamic Characteristics of A Twin Hybrid AUVDocument20 pagesA CFD Study of Hydrodynamic Characteristics of A Twin Hybrid AUVAnh NgoNo ratings yet
- CFD and Potential Ow Assessment of The Hydrodynamics of A KitefoilDocument43 pagesCFD and Potential Ow Assessment of The Hydrodynamics of A KitefoilNguyen Quoc AnhNo ratings yet
- I 11 292Document9 pagesI 11 292Rasheed YusufNo ratings yet
- CSYS AbstractsDocument87 pagesCSYS AbstractsGraham WestbrookNo ratings yet
- Integrated Design of A Semi-Submersible Floating Vertical Axis Wind Turbine (VAWT) With Active Blade Pitch ControlDocument13 pagesIntegrated Design of A Semi-Submersible Floating Vertical Axis Wind Turbine (VAWT) With Active Blade Pitch ControlNgh lfouxNo ratings yet
- Design of Hydrofoil UsingDocument18 pagesDesign of Hydrofoil UsingmarihomenonNo ratings yet
- A Consistent Method To Design and Evaluate The Performance of Anti-Roll Tanks For ShipsDocument30 pagesA Consistent Method To Design and Evaluate The Performance of Anti-Roll Tanks For ShipsPengjing WangNo ratings yet
- Numerical Simulation of Seakeeping Performance On The Preliminary Design of A Semi-Planing CraftDocument24 pagesNumerical Simulation of Seakeeping Performance On The Preliminary Design of A Semi-Planing CraftFiul AlamNo ratings yet
- Study of Water Jet Propulsion System Design For Fast Patrol Boat (Fpb-60)Document7 pagesStudy of Water Jet Propulsion System Design For Fast Patrol Boat (Fpb-60)ABeNo ratings yet
- On The Design of An Autonomous Robot Fish: June 2003Document7 pagesOn The Design of An Autonomous Robot Fish: June 2003Trương PhúNo ratings yet
- Simulation of The Maneuvering Behavior of Ships Under The in Uence of Environmental ForcesDocument10 pagesSimulation of The Maneuvering Behavior of Ships Under The in Uence of Environmental ForcesMori Shan24No ratings yet
- Preliminary Design of A Small Unmanned Battery 3570581 - Peukert - VoltageDocument12 pagesPreliminary Design of A Small Unmanned Battery 3570581 - Peukert - Voltageumunera2997No ratings yet
- DTMPC Iccgs2019Document8 pagesDTMPC Iccgs2019ali bendlalaNo ratings yet
- Simulation Analysis of Fin Stabilizers On Turning Circle Control During Ship TurnsDocument9 pagesSimulation Analysis of Fin Stabilizers On Turning Circle Control During Ship TurnsnevbiralyaNo ratings yet
- Adaptive Backstepping Sliding Mode Control For Rudder/Fin Joint Roll Stabilization SystemDocument5 pagesAdaptive Backstepping Sliding Mode Control For Rudder/Fin Joint Roll Stabilization SystemImun Fataa FataaNo ratings yet
- NPL With NacaDocument18 pagesNPL With NacaMuhamad Nazren Mohamed ZaidiNo ratings yet
- Identification of 4 DoF Maneuvering Mathemat 2022 International Journal of NDocument16 pagesIdentification of 4 DoF Maneuvering Mathemat 2022 International Journal of NNguyen Phuc LinhNo ratings yet
- Using CFD Software To Calculate Hydrodynamic CoefficientsDocument7 pagesUsing CFD Software To Calculate Hydrodynamic CoefficientsfauzanhanifNo ratings yet
- TOXOPEUS - Manoeuvring Aspects of Fast Ships With PodsDocument15 pagesTOXOPEUS - Manoeuvring Aspects of Fast Ships With PodstonimakroneNo ratings yet
- Flipse VOITHDocument10 pagesFlipse VOITHMohamed HassanNo ratings yet
- Influence of The Camber Trailing Edge Win 2022 International Journal of NavaDocument12 pagesInfluence of The Camber Trailing Edge Win 2022 International Journal of NavaNguyen Phuc LinhNo ratings yet
- Applsci 13 01551Document16 pagesApplsci 13 01551Anh NgoNo ratings yet
- An Experimental Study of Interceptors Final Ocean EngineeringDocument33 pagesAn Experimental Study of Interceptors Final Ocean EngineeringNavneetNo ratings yet
- Max KGvs DraftDocument10 pagesMax KGvs DraftSubrata BhattacharyaNo ratings yet
- An Overview of The Prediction Methods For Roll Damping of ShipsDocument22 pagesAn Overview of The Prediction Methods For Roll Damping of ShipsВасил ЙордановNo ratings yet
- ODYN2012Document12 pagesODYN2012Bruno MedinaNo ratings yet
- A Heave Compensation Approach For Offshore CranesDocument6 pagesA Heave Compensation Approach For Offshore CranesRenata AraujoNo ratings yet
- Cooperative Control System of The Floating Cranes For The Dual LiftingDocument8 pagesCooperative Control System of The Floating Cranes For The Dual LiftingSebastian Velásquez MoralesNo ratings yet
- 1 s2.0 S0029801820312373 MainDocument19 pages1 s2.0 S0029801820312373 Main刘五六No ratings yet
- United States Naval AcademyDocument20 pagesUnited States Naval AcademyShaat KumarNo ratings yet
- The Impactof Sloshing Liquidson Ship Stabilityfor Various Dimensionsof Partly FilledDocument10 pagesThe Impactof Sloshing Liquidson Ship Stabilityfor Various Dimensionsof Partly FilledFawwaz MananNo ratings yet
- Development of Preliminary Ship Motion Prediction Tool For Coupled Heave and PitchDocument11 pagesDevelopment of Preliminary Ship Motion Prediction Tool For Coupled Heave and PitchlapuNo ratings yet
- Air Lubricated and Air Cavity Ships: Development, Design, and ApplicationFrom EverandAir Lubricated and Air Cavity Ships: Development, Design, and ApplicationNo ratings yet
- Steel PipeDocument1 pageSteel Pipesafar bahariNo ratings yet
- H T-Valvula CLACK WS 1.5EE Con MedidorDocument2 pagesH T-Valvula CLACK WS 1.5EE Con MedidorAnthony EstradaNo ratings yet
- 27 4 Swing CheatsheetDocument4 pages27 4 Swing CheatsheetShilpa PrakashNo ratings yet
- FurnaceDocument6 pagesFurnaceChacon Jose WalterNo ratings yet
- Java MCQDocument9 pagesJava MCQSushil Patel100% (1)
- Water Demand CalculationDocument3 pagesWater Demand Calculationpravin mundeNo ratings yet
- Eaton Fuller ManualDocument1 pageEaton Fuller Manualavargasc175% (4)
- Queastion Bank MOM 22 26Document5 pagesQueastion Bank MOM 22 26karvaminNo ratings yet
- Precision Digital Pressure Gauge Model CPG1000: ApplicationsDocument9 pagesPrecision Digital Pressure Gauge Model CPG1000: ApplicationsCarlos BernussiNo ratings yet
- Wheel Weight SizeDocument56 pagesWheel Weight SizeHerciu FlavianNo ratings yet
- Spare Parts List: R902482759 Drawing: Material NumberDocument24 pagesSpare Parts List: R902482759 Drawing: Material Numberchaky212No ratings yet
- AITS 2324 FT III JEEM TD SolDocument15 pagesAITS 2324 FT III JEEM TD Soladoranto737No ratings yet
- Cebex 100 PDFDocument2 pagesCebex 100 PDFBijaya RaulaNo ratings yet
- Project PGCINDSDocument8 pagesProject PGCINDSShahab AlamNo ratings yet
- PLAXISDocument10 pagesPLAXISSharmeelee S.No ratings yet
- Product Sales Sheet PDFDocument2 pagesProduct Sales Sheet PDFPETER LOCKNo ratings yet
- Interfacing in Crushing and Screening PlantsDocument27 pagesInterfacing in Crushing and Screening PlantsAnku PandeyNo ratings yet
- Data Sheet: V GR: Material: Viton 60 Shore - Genuine Dupont PolymerDocument1 pageData Sheet: V GR: Material: Viton 60 Shore - Genuine Dupont PolymerBharat KumarNo ratings yet
- Visio Briket1Document1 pageVisio Briket1Pradika WibowoNo ratings yet
- 8 Analysis Part2 Chapter5Document3 pages8 Analysis Part2 Chapter5Aldwin CantosNo ratings yet
- Manual Utilizare Sistem Garaj - SPIDODocument78 pagesManual Utilizare Sistem Garaj - SPIDOTheodora GherdanNo ratings yet
- 65602-Gd Cutsheet Template Pzgpz7 2015 LRDocument2 pages65602-Gd Cutsheet Template Pzgpz7 2015 LRroberto restrepoNo ratings yet
- HIDRAULICA DE CANALES ABIERTOS - Editado-WordDocument87 pagesHIDRAULICA DE CANALES ABIERTOS - Editado-WordLuis Zambrana0% (1)
- Market Survey - PetrofacDocument4 pagesMarket Survey - PetrofacNaeem DeenNo ratings yet
- Superalloys 1991 719 734Document16 pagesSuperalloys 1991 719 734VigneswaranNo ratings yet
- Service Manuals Sharp AIR PURIFYER FU 40SE J FU 40SE J Service ManualDocument28 pagesService Manuals Sharp AIR PURIFYER FU 40SE J FU 40SE J Service Manualanfsujee100% (1)
- (Constitution Book) Cepsi 2018 - Interactive PDF - 07092018Document37 pages(Constitution Book) Cepsi 2018 - Interactive PDF - 07092018Nhung TranNo ratings yet
- Stiffness ModifiersDocument5 pagesStiffness ModifiersA MumtazNo ratings yet
- MD196TIDocument2 pagesMD196TI오영대No ratings yet
























































































Download as pdf or txt
You might also like
- BS en 856-2015Document22 pagesBS en 856-2015leancalidadNo ratings yet
- Ship Hull AppendageDocument8 pagesShip Hull AppendageMuhamad Nazren Mohamed ZaidiNo ratings yet
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsFrom EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo ratings yet
- 2022-Deisgn of A Disc-Shaped AUH With Stable FinsDocument16 pages2022-Deisgn of A Disc-Shaped AUH With Stable FinsAnh NgoNo ratings yet
- J Ijnaoe 2016 09 010Document8 pagesJ Ijnaoe 2016 09 010Anh NgoNo ratings yet
- Ship Dynamic Intact Stability Focus On Parametric Roll: Technical ReportDocument44 pagesShip Dynamic Intact Stability Focus On Parametric Roll: Technical Reporteacikel78No ratings yet
- Hydrodynamic Shape Optimization of A Hybrid Underwater GliderDocument7 pagesHydrodynamic Shape Optimization of A Hybrid Underwater GliderManh Dien HuynhNo ratings yet
- Ocean Engineering: Applying The PD Controller On The Roll Reduction and Track Keeping For The Ship Advancing in WavesDocument17 pagesOcean Engineering: Applying The PD Controller On The Roll Reduction and Track Keeping For The Ship Advancing in WavesAgung W. WidodoNo ratings yet
- Yutesma 0704, IJEASTDocument5 pagesYutesma 0704, IJEASTFatehsingh parabNo ratings yet
- Paper 1125Document14 pagesPaper 1125famíliafeliz fletesbrumNo ratings yet
- Applied Ocean Research: Yuanyuan Wang, Shuhong Chai, Faisal Khan, Hung Duc NguyenDocument13 pagesApplied Ocean Research: Yuanyuan Wang, Shuhong Chai, Faisal Khan, Hung Duc NguyenMilton AlvaradoNo ratings yet
- Stability Criteria For Sailing Vessels: January 2008Document15 pagesStability Criteria For Sailing Vessels: January 2008Daniel OOWNo ratings yet
- 1 s2.0 S014111872100393X MainDocument13 pages1 s2.0 S014111872100393X Main刘五六No ratings yet
- 2014 Paper Berth Scour Protection For Modern VesselsDocument20 pages2014 Paper Berth Scour Protection For Modern VesselsFelipe Strafite CusterNo ratings yet
- Design Study of Podded Propulsion System For Naval ShipDocument8 pagesDesign Study of Podded Propulsion System For Naval Shippal_malayNo ratings yet
- Dong 2020Document11 pagesDong 2020Anh NgoNo ratings yet
- Piaggio Et Al. - Z-Drive Escort Tug Manoeuvrability Model and SimulationDocument17 pagesPiaggio Et Al. - Z-Drive Escort Tug Manoeuvrability Model and SimulationMaciej ReichelNo ratings yet
- Paper Session 4 Hawks Wood MDocument20 pagesPaper Session 4 Hawks Wood Msea_jazzNo ratings yet
- Elements of Underwater Glider Performance and StabilityDocument28 pagesElements of Underwater Glider Performance and StabilityÍcaro ReisNo ratings yet
- Stabilization of Load's Position in Offshore Cranes: A. Maczyn Ski S. WojciechDocument10 pagesStabilization of Load's Position in Offshore Cranes: A. Maczyn Ski S. WojciechGrant HosieNo ratings yet
- Study On Offloading Operation of Cylindrical FPSO UnderDocument12 pagesStudy On Offloading Operation of Cylindrical FPSO UnderDAN CHAMZNo ratings yet
- Design Toy Submarine Underwater VehicleDocument8 pagesDesign Toy Submarine Underwater VehicleErickson OngNo ratings yet
- Aero-Hydrodynamics of An RS:X Olympic Racing Sailboard:, IncludingDocument18 pagesAero-Hydrodynamics of An RS:X Olympic Racing Sailboard:, IncludingOliwier UrbańskiNo ratings yet
- Design of Passive Anti-Roll Tanks For Roll Stabilization in The Nonlinear RangeDocument16 pagesDesign of Passive Anti-Roll Tanks For Roll Stabilization in The Nonlinear RangeVinay Kumar VarmaNo ratings yet
- OMAE2012 83166FenderModelling SI ReviewDocument10 pagesOMAE2012 83166FenderModelling SI ReviewAung Soe LynnNo ratings yet
- Loveday Design 2006 PDFDocument146 pagesLoveday Design 2006 PDFmukeshmystNo ratings yet
- Advances in Optimization in Yacht Performance AnalDocument9 pagesAdvances in Optimization in Yacht Performance AnalCristian LaiNo ratings yet
- A CFD Study of Hydrodynamic Characteristics of A Twin Hybrid AUVDocument20 pagesA CFD Study of Hydrodynamic Characteristics of A Twin Hybrid AUVAnh NgoNo ratings yet
- CFD and Potential Ow Assessment of The Hydrodynamics of A KitefoilDocument43 pagesCFD and Potential Ow Assessment of The Hydrodynamics of A KitefoilNguyen Quoc AnhNo ratings yet
- I 11 292Document9 pagesI 11 292Rasheed YusufNo ratings yet
- CSYS AbstractsDocument87 pagesCSYS AbstractsGraham WestbrookNo ratings yet
- Integrated Design of A Semi-Submersible Floating Vertical Axis Wind Turbine (VAWT) With Active Blade Pitch ControlDocument13 pagesIntegrated Design of A Semi-Submersible Floating Vertical Axis Wind Turbine (VAWT) With Active Blade Pitch ControlNgh lfouxNo ratings yet
- Design of Hydrofoil UsingDocument18 pagesDesign of Hydrofoil UsingmarihomenonNo ratings yet
- A Consistent Method To Design and Evaluate The Performance of Anti-Roll Tanks For ShipsDocument30 pagesA Consistent Method To Design and Evaluate The Performance of Anti-Roll Tanks For ShipsPengjing WangNo ratings yet
- Numerical Simulation of Seakeeping Performance On The Preliminary Design of A Semi-Planing CraftDocument24 pagesNumerical Simulation of Seakeeping Performance On The Preliminary Design of A Semi-Planing CraftFiul AlamNo ratings yet
- Study of Water Jet Propulsion System Design For Fast Patrol Boat (Fpb-60)Document7 pagesStudy of Water Jet Propulsion System Design For Fast Patrol Boat (Fpb-60)ABeNo ratings yet
- On The Design of An Autonomous Robot Fish: June 2003Document7 pagesOn The Design of An Autonomous Robot Fish: June 2003Trương PhúNo ratings yet
- Simulation of The Maneuvering Behavior of Ships Under The in Uence of Environmental ForcesDocument10 pagesSimulation of The Maneuvering Behavior of Ships Under The in Uence of Environmental ForcesMori Shan24No ratings yet
- Preliminary Design of A Small Unmanned Battery 3570581 - Peukert - VoltageDocument12 pagesPreliminary Design of A Small Unmanned Battery 3570581 - Peukert - Voltageumunera2997No ratings yet
- DTMPC Iccgs2019Document8 pagesDTMPC Iccgs2019ali bendlalaNo ratings yet
- Simulation Analysis of Fin Stabilizers On Turning Circle Control During Ship TurnsDocument9 pagesSimulation Analysis of Fin Stabilizers On Turning Circle Control During Ship TurnsnevbiralyaNo ratings yet
- Adaptive Backstepping Sliding Mode Control For Rudder/Fin Joint Roll Stabilization SystemDocument5 pagesAdaptive Backstepping Sliding Mode Control For Rudder/Fin Joint Roll Stabilization SystemImun Fataa FataaNo ratings yet
- NPL With NacaDocument18 pagesNPL With NacaMuhamad Nazren Mohamed ZaidiNo ratings yet
- Identification of 4 DoF Maneuvering Mathemat 2022 International Journal of NDocument16 pagesIdentification of 4 DoF Maneuvering Mathemat 2022 International Journal of NNguyen Phuc LinhNo ratings yet
- Using CFD Software To Calculate Hydrodynamic CoefficientsDocument7 pagesUsing CFD Software To Calculate Hydrodynamic CoefficientsfauzanhanifNo ratings yet
- TOXOPEUS - Manoeuvring Aspects of Fast Ships With PodsDocument15 pagesTOXOPEUS - Manoeuvring Aspects of Fast Ships With PodstonimakroneNo ratings yet
- Flipse VOITHDocument10 pagesFlipse VOITHMohamed HassanNo ratings yet
- Influence of The Camber Trailing Edge Win 2022 International Journal of NavaDocument12 pagesInfluence of The Camber Trailing Edge Win 2022 International Journal of NavaNguyen Phuc LinhNo ratings yet
- Applsci 13 01551Document16 pagesApplsci 13 01551Anh NgoNo ratings yet
- An Experimental Study of Interceptors Final Ocean EngineeringDocument33 pagesAn Experimental Study of Interceptors Final Ocean EngineeringNavneetNo ratings yet
- Max KGvs DraftDocument10 pagesMax KGvs DraftSubrata BhattacharyaNo ratings yet
- An Overview of The Prediction Methods For Roll Damping of ShipsDocument22 pagesAn Overview of The Prediction Methods For Roll Damping of ShipsВасил ЙордановNo ratings yet
- ODYN2012Document12 pagesODYN2012Bruno MedinaNo ratings yet
- A Heave Compensation Approach For Offshore CranesDocument6 pagesA Heave Compensation Approach For Offshore CranesRenata AraujoNo ratings yet
- Cooperative Control System of The Floating Cranes For The Dual LiftingDocument8 pagesCooperative Control System of The Floating Cranes For The Dual LiftingSebastian Velásquez MoralesNo ratings yet
- 1 s2.0 S0029801820312373 MainDocument19 pages1 s2.0 S0029801820312373 Main刘五六No ratings yet
- United States Naval AcademyDocument20 pagesUnited States Naval AcademyShaat KumarNo ratings yet
- The Impactof Sloshing Liquidson Ship Stabilityfor Various Dimensionsof Partly FilledDocument10 pagesThe Impactof Sloshing Liquidson Ship Stabilityfor Various Dimensionsof Partly FilledFawwaz MananNo ratings yet
- Development of Preliminary Ship Motion Prediction Tool For Coupled Heave and PitchDocument11 pagesDevelopment of Preliminary Ship Motion Prediction Tool For Coupled Heave and PitchlapuNo ratings yet
- Air Lubricated and Air Cavity Ships: Development, Design, and ApplicationFrom EverandAir Lubricated and Air Cavity Ships: Development, Design, and ApplicationNo ratings yet
- Steel PipeDocument1 pageSteel Pipesafar bahariNo ratings yet
- H T-Valvula CLACK WS 1.5EE Con MedidorDocument2 pagesH T-Valvula CLACK WS 1.5EE Con MedidorAnthony EstradaNo ratings yet
- 27 4 Swing CheatsheetDocument4 pages27 4 Swing CheatsheetShilpa PrakashNo ratings yet
- FurnaceDocument6 pagesFurnaceChacon Jose WalterNo ratings yet
- Java MCQDocument9 pagesJava MCQSushil Patel100% (1)
- Water Demand CalculationDocument3 pagesWater Demand Calculationpravin mundeNo ratings yet
- Eaton Fuller ManualDocument1 pageEaton Fuller Manualavargasc175% (4)
- Queastion Bank MOM 22 26Document5 pagesQueastion Bank MOM 22 26karvaminNo ratings yet
- Precision Digital Pressure Gauge Model CPG1000: ApplicationsDocument9 pagesPrecision Digital Pressure Gauge Model CPG1000: ApplicationsCarlos BernussiNo ratings yet
- Wheel Weight SizeDocument56 pagesWheel Weight SizeHerciu FlavianNo ratings yet
- Spare Parts List: R902482759 Drawing: Material NumberDocument24 pagesSpare Parts List: R902482759 Drawing: Material Numberchaky212No ratings yet
- AITS 2324 FT III JEEM TD SolDocument15 pagesAITS 2324 FT III JEEM TD Soladoranto737No ratings yet
- Cebex 100 PDFDocument2 pagesCebex 100 PDFBijaya RaulaNo ratings yet
- Project PGCINDSDocument8 pagesProject PGCINDSShahab AlamNo ratings yet
- PLAXISDocument10 pagesPLAXISSharmeelee S.No ratings yet
- Product Sales Sheet PDFDocument2 pagesProduct Sales Sheet PDFPETER LOCKNo ratings yet
- Interfacing in Crushing and Screening PlantsDocument27 pagesInterfacing in Crushing and Screening PlantsAnku PandeyNo ratings yet
- Data Sheet: V GR: Material: Viton 60 Shore - Genuine Dupont PolymerDocument1 pageData Sheet: V GR: Material: Viton 60 Shore - Genuine Dupont PolymerBharat KumarNo ratings yet
- Visio Briket1Document1 pageVisio Briket1Pradika WibowoNo ratings yet
- 8 Analysis Part2 Chapter5Document3 pages8 Analysis Part2 Chapter5Aldwin CantosNo ratings yet
- Manual Utilizare Sistem Garaj - SPIDODocument78 pagesManual Utilizare Sistem Garaj - SPIDOTheodora GherdanNo ratings yet
- 65602-Gd Cutsheet Template Pzgpz7 2015 LRDocument2 pages65602-Gd Cutsheet Template Pzgpz7 2015 LRroberto restrepoNo ratings yet
- HIDRAULICA DE CANALES ABIERTOS - Editado-WordDocument87 pagesHIDRAULICA DE CANALES ABIERTOS - Editado-WordLuis Zambrana0% (1)
- Market Survey - PetrofacDocument4 pagesMarket Survey - PetrofacNaeem DeenNo ratings yet
- Superalloys 1991 719 734Document16 pagesSuperalloys 1991 719 734VigneswaranNo ratings yet
- Service Manuals Sharp AIR PURIFYER FU 40SE J FU 40SE J Service ManualDocument28 pagesService Manuals Sharp AIR PURIFYER FU 40SE J FU 40SE J Service Manualanfsujee100% (1)
- (Constitution Book) Cepsi 2018 - Interactive PDF - 07092018Document37 pages(Constitution Book) Cepsi 2018 - Interactive PDF - 07092018Nhung TranNo ratings yet
- Stiffness ModifiersDocument5 pagesStiffness ModifiersA MumtazNo ratings yet
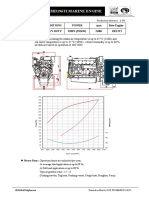
- MD196TIDocument2 pagesMD196TI오영대No ratings yet