Download as pdf or txt
You might also like
- Defect Catalogue - Galva .Document45 pagesDefect Catalogue - Galva .Suvro ChakrabortyNo ratings yet
- Design Calculation of Working Platform-1Document26 pagesDesign Calculation of Working Platform-1Khandaker Khairul Alam100% (1)
- Service Manual: © MARCH 2016, Mercury Marine. All Rights Reserved. 90-8M0107213Document94 pagesService Manual: © MARCH 2016, Mercury Marine. All Rights Reserved. 90-8M0107213fabianoNo ratings yet
- R-30iB PMC Manual (B-83254EN 01)Document520 pagesR-30iB PMC Manual (B-83254EN 01)Sem FadeyNo ratings yet
- Scientific Method - WorksheetDocument1 pageScientific Method - WorksheetAlejandro RobloxNo ratings yet
- New American Paintings - December-January, 2019Document180 pagesNew American Paintings - December-January, 2019Fabio Nagual100% (2)
- JETIR2403939Document7 pagesJETIR2403939chetankittur393No ratings yet
- Product ManualDocument15 pagesProduct ManualbegradovNo ratings yet
- IJRPR24894Document6 pagesIJRPR24894kesebas6exNo ratings yet
- Plant DocumentDocument21 pagesPlant DocumentKongu BhuvaneshNo ratings yet
- Object Oriented Software Engineering: Requirements ElicitationDocument45 pagesObject Oriented Software Engineering: Requirements ElicitationSaleem IqbalNo ratings yet
- Teaching and Learning Robotic Arm ModelDocument6 pagesTeaching and Learning Robotic Arm ModelGeorgiana BunghiuzNo ratings yet
- IJSDR2206047Document11 pagesIJSDR2206047akhileshshilpi6No ratings yet
- Design and Development of Pick and Place Robot: Guided By: MR SHEHIN N Asst Prof, ME Presented By: JERIN L (JIT20ME011)Document14 pagesDesign and Development of Pick and Place Robot: Guided By: MR SHEHIN N Asst Prof, ME Presented By: JERIN L (JIT20ME011)Nandana U SNo ratings yet
- 3 Degree of Freedom Robotic Arm For PickupDocument14 pages3 Degree of Freedom Robotic Arm For Pickuprishikesh badveNo ratings yet
- Design Developmentof THEROBUSTAn Autonomous Mobile RobotDocument10 pagesDesign Developmentof THEROBUSTAn Autonomous Mobile RobotRamy ChaayaNo ratings yet
- Design and Implementation of An Autonomous Robotic ArmDocument11 pagesDesign and Implementation of An Autonomous Robotic ArmInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- SRS ProjectDocument10 pagesSRS Projectm.qutab03No ratings yet
- Product Requirement DocumentDocument11 pagesProduct Requirement DocumentagitronicsNo ratings yet
- 1106 - Iot 002 - Iot 0776Document14 pages1106 - Iot 002 - Iot 07760000rcnNo ratings yet
- Intelligent Prediction Monitoring System For Predictive Maintenance in ManufacturingDocument6 pagesIntelligent Prediction Monitoring System For Predictive Maintenance in Manufacturingsurekha dobaleNo ratings yet
- Robot ArmDocument7 pagesRobot Armjagadeeshravitejakamuju45No ratings yet
- Software Requirements Specification: K.J.Somaiya College of Engineering, VidyaviharDocument11 pagesSoftware Requirements Specification: K.J.Somaiya College of Engineering, VidyaviharAshWin ShresthaNo ratings yet
- Final ProjectDocument13 pagesFinal Projectnet19b230No ratings yet
- Multiple Sensor Integrated Robotic End-Effectors For AssemblyDocument8 pagesMultiple Sensor Integrated Robotic End-Effectors For AssemblyNELWIN JONESNo ratings yet
- Pick and Place Robotic ARM Using PLC: Abhiraj Bhalerao Prasad DoifodeDocument4 pagesPick and Place Robotic ARM Using PLC: Abhiraj Bhalerao Prasad DoifodeBilvanadham NNo ratings yet
- Pick and Place Robotic Arm Using PLC IJERTV8IS080268 PDFDocument4 pagesPick and Place Robotic Arm Using PLC IJERTV8IS080268 PDFDinesh PanickerNo ratings yet
- Pick and Place Robotic ARM Using PLC: Abhiraj Bhalerao Prasad DoifodeDocument4 pagesPick and Place Robotic ARM Using PLC: Abhiraj Bhalerao Prasad DoifodeBilvanadham NNo ratings yet
- Lecture 01 - Embedded SystemsDocument54 pagesLecture 01 - Embedded SystemsDibya joyNo ratings yet
- Smart Farming System - CompressDocument31 pagesSmart Farming System - Compresskamaleshupadhyay388No ratings yet
- 0 MullerVillegas-Chapter8Document37 pages0 MullerVillegas-Chapter8Laura NicoletaNo ratings yet
- IJRA TemplateDocument9 pagesIJRA TemplateLuis VelascoNo ratings yet
- NM 3docxDocument6 pagesNM 3docx4302-Balaji JNo ratings yet
- Design and Implementation of An Intelligent RobotiDocument9 pagesDesign and Implementation of An Intelligent RobotiquNo ratings yet
- Raj Oose 7THDocument6 pagesRaj Oose 7THrajaprasath560No ratings yet
- Development and Integration of Laser Sensor Tracking System in Robotic Arm For Path Correction During Welding OperationDocument9 pagesDevelopment and Integration of Laser Sensor Tracking System in Robotic Arm For Path Correction During Welding OperationIAES International Journal of Robotics and AutomationNo ratings yet
- Softeare EngDocument19 pagesSofteare EngSasuke UchihaNo ratings yet
- All Chapter Final ThesisDocument20 pagesAll Chapter Final ThesistayzarlwintunNo ratings yet
- Problem StatementDocument4 pagesProblem StatementAmruta AvhaleNo ratings yet
- Teaching and Learning Robotic Arm Model: Kadirimangalam Jahnavi Sivraj PDocument6 pagesTeaching and Learning Robotic Arm Model: Kadirimangalam Jahnavi Sivraj PCătălin PuțoiNo ratings yet
- Mobile Botnet DetectionDocument7 pagesMobile Botnet DetectionIJRASETPublicationsNo ratings yet
- Se 2.1Document3 pagesSe 2.1Chanee AbordoNo ratings yet
- Iee Format Updated ReportDocument5 pagesIee Format Updated ReportrabiaNo ratings yet
- Fin Irjmets1684420012Document4 pagesFin Irjmets1684420012tanujatanubhoirNo ratings yet
- 10 Experiments+Index (SE)Document30 pages10 Experiments+Index (SE)mishraabhay694No ratings yet
- Onebnb (13,26,84)Document12 pagesOnebnb (13,26,84)Devagya RattanNo ratings yet
- SRS ReportDocument15 pagesSRS Reportlaibazahid862No ratings yet
- IAC-07-D2.I.03 Process Automation Systems For Propellant Servicing of Liquid Stages For Satellite Launch VehiclesDocument14 pagesIAC-07-D2.I.03 Process Automation Systems For Propellant Servicing of Liquid Stages For Satellite Launch Vehiclesemv_prasadNo ratings yet
- Virtual Automation: Submitted By: AAYUSHI VISHNOI Submitted To: Dr. Arun Kumar G Roll No.: 1900910310003 Section: 5EC-1Document12 pagesVirtual Automation: Submitted By: AAYUSHI VISHNOI Submitted To: Dr. Arun Kumar G Roll No.: 1900910310003 Section: 5EC-1Abhay SinghNo ratings yet
- On-Site Maintenance Services by Using Web 3.0 and React JSDocument6 pagesOn-Site Maintenance Services by Using Web 3.0 and React JSIJRASETPublicationsNo ratings yet
- Srs On Smart Recycle Bin SystemDocument20 pagesSrs On Smart Recycle Bin SystemAyush KumarNo ratings yet
- JETIRFA06001Document5 pagesJETIRFA06001Trần ĐạtNo ratings yet
- 2 MDocument7 pages2 Mcekawob761No ratings yet
- PR Ése NtationDocument8 pagesPR Ése Ntationyannickporsche60No ratings yet
- Line Following Robot ResearchDocument4 pagesLine Following Robot ResearchtherealslimNo ratings yet
- Design and Development of Digital PID Controller For DC Motor Drive System Using Embedded Platform For Mobile RobotDocument5 pagesDesign and Development of Digital PID Controller For DC Motor Drive System Using Embedded Platform For Mobile Robotenghasan1969No ratings yet
- Joystick Controlled Industrial Robotic System With Robotic ArmDocument5 pagesJoystick Controlled Industrial Robotic System With Robotic ArmSanjeev KumarNo ratings yet
- Simulation of Pick and Place Robotics System Using Solidworks SoftmotionDocument7 pagesSimulation of Pick and Place Robotics System Using Solidworks SoftmotionSaumya SaxenaNo ratings yet
- Issa 2017Document6 pagesIssa 2017Hassan AlviNo ratings yet
- Robo ProjDocument14 pagesRobo Projshreeharanking22No ratings yet
- Using MBD Iec 62304 Compliant Software Dev Process WhitepaperDocument12 pagesUsing MBD Iec 62304 Compliant Software Dev Process Whitepapernextv1No ratings yet
- Resilient IRP Function Developer GuideDocument30 pagesResilient IRP Function Developer GuideTan DoNo ratings yet
- Ref 11Document6 pagesRef 11Redbytes Recruitment2022 - Entry LetterNo ratings yet
- Coiled Tubing Case StudyDocument4 pagesCoiled Tubing Case StudyRajan SinhaNo ratings yet
- SEN 22413 All Experiment (Join AICTE)Document44 pagesSEN 22413 All Experiment (Join AICTE)JoshilaNo ratings yet
- Robot Operating System (ROS): The Complete Reference (Volume 6)From EverandRobot Operating System (ROS): The Complete Reference (Volume 6)No ratings yet
- Sika® Stabilizer TBM TS-2 TK: Product Data SheetDocument2 pagesSika® Stabilizer TBM TS-2 TK: Product Data SheetDavid V. BaltazarNo ratings yet
- Ashghal - Silent Login: AcknowledgementsDocument4 pagesAshghal - Silent Login: AcknowledgementsSyed QasimNo ratings yet
- Motadata EMS DatasheetDocument11 pagesMotadata EMS DatasheetAnush BhardwajNo ratings yet
- Editorial Status Report - Dr. Y. Thiagarajan - JERRDocument3 pagesEditorial Status Report - Dr. Y. Thiagarajan - JERRThiaga RajanNo ratings yet
- Q& A Operation Management CaseDocument4 pagesQ& A Operation Management CaseAbdullah Al MunirNo ratings yet
- Weatherby Vanguard Bolt Action RifleDocument22 pagesWeatherby Vanguard Bolt Action RifleJon MorenoNo ratings yet
- Impact of Electricity Power OutagesDocument13 pagesImpact of Electricity Power OutagesGaspard UkwizagiraNo ratings yet
- Reverse Unloader Valve Rev0Document1 pageReverse Unloader Valve Rev0JasonNo ratings yet
- Lab Report 1Document5 pagesLab Report 1jvelezdanielaNo ratings yet
- Resume August RothenbergerDocument1 pageResume August Rothenbergerapi-355836337No ratings yet
- LabVentMgmt RPDocument100 pagesLabVentMgmt RPGanesh.MahendraNo ratings yet
- BW010En Plastic Mould SteelsDocument20 pagesBW010En Plastic Mould SteelsFarid Impact TubesNo ratings yet
- FractureDocument16 pagesFractureps4haris.ch3534No ratings yet
- Abstract Number: 191 Finite Element Analysis of Geotextile Reinforced Highway Embankment Using Plaxis 3DDocument13 pagesAbstract Number: 191 Finite Element Analysis of Geotextile Reinforced Highway Embankment Using Plaxis 3DAnjali SharmaNo ratings yet
- Analog Communication W3Document9 pagesAnalog Communication W3Subhajit BhattacharyyaNo ratings yet
- Selective Red Cell Variables in Chippiparai Hound Breeds of Tamil Nadu - A Pilot Study in 30 DogsDocument6 pagesSelective Red Cell Variables in Chippiparai Hound Breeds of Tamil Nadu - A Pilot Study in 30 DogsIndian Journal of Veterinary and Animal Sciences RNo ratings yet
- Multiple Choice Questions (1 PT Each)Document5 pagesMultiple Choice Questions (1 PT Each)Sekar PuspitaNo ratings yet
- Nonlinear Fiber Optics: Its History and Recent ProgressDocument10 pagesNonlinear Fiber Optics: Its History and Recent ProgressEwerton Gustavo Soares GomesNo ratings yet
- Sexual ReproductionDocument6 pagesSexual ReproductionAlyssa Margareth SorianoNo ratings yet
- Adina ModelisationDocument240 pagesAdina ModelisationSafia SoufiNo ratings yet
- RT 200 Midterm Ist TopicDocument34 pagesRT 200 Midterm Ist TopicYola RazoNo ratings yet
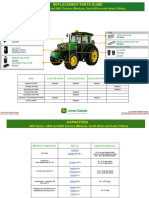
- 6003 Series 6403 and 6603 Tractors Mexico South Africa and Asian Edition Replacement Parts GuideDocument3 pages6003 Series 6403 and 6603 Tractors Mexico South Africa and Asian Edition Replacement Parts GuidePedro ValerioNo ratings yet
- VAMP 125: Unit For Flexible Arc Flash ProtectionDocument12 pagesVAMP 125: Unit For Flexible Arc Flash Protectionuday chaurasiaNo ratings yet
- PG Prospectus 2022Document20 pagesPG Prospectus 2022Harshit AmbeshNo ratings yet