Download as pdf or txt
You might also like
- Module 4 MC 18EC46 Timer CounterDocument19 pagesModule 4 MC 18EC46 Timer Counterkirthi bharadwajNo ratings yet
- (Smtebooks - Eu) Coffee Break Python 1st Edition PDFDocument196 pages(Smtebooks - Eu) Coffee Break Python 1st Edition PDFsener.asli100% (9)
- Swing TradingDocument12 pagesSwing TradingAalon Sheikh71% (24)
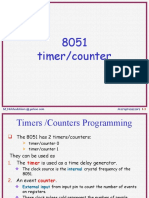
- Timer Counter in 8051Document54 pagesTimer Counter in 8051Suganthi EvangelineNo ratings yet
- Counter/Timer Programming in The 8051Document40 pagesCounter/Timer Programming in The 8051Ashmiya leninNo ratings yet
- 8051 Microcontroller Timer/Counter: Presented By: AKASH GUPTA 111257 Ankit Saha 111340Document40 pages8051 Microcontroller Timer/Counter: Presented By: AKASH GUPTA 111257 Ankit Saha 111340ryanNo ratings yet
- Timers, Serial CommunicationDocument19 pagesTimers, Serial CommunicationVyshnav PNo ratings yet
- Timers, Serial Port & Interrupts in 8051Document57 pagesTimers, Serial Port & Interrupts in 8051Kadher Naina MohamedNo ratings yet
- Basics of Interrupts.: Steps Taken by Processor While Processing An InterruptDocument10 pagesBasics of Interrupts.: Steps Taken by Processor While Processing An InterruptAmy OliverNo ratings yet
- Microcontroller 8051 Programming in CDocument22 pagesMicrocontroller 8051 Programming in CM.K50% (2)
- 8051 Timers Programming in CDocument12 pages8051 Timers Programming in CDr. Ritula ThakurNo ratings yet
- Timers, Serial, InterDocument107 pagesTimers, Serial, Inters sreehari,No ratings yet
- Timers of 8051Document27 pagesTimers of 8051r03192299No ratings yet
- Bore Gowda S B E & C Dept. MIT, ManipalDocument37 pagesBore Gowda S B E & C Dept. MIT, ManipalShivaram NNo ratings yet
- Timers, Serial Port & Interrupts in 8051Document51 pagesTimers, Serial Port & Interrupts in 8051Sureka N Assistant Professor - ECENo ratings yet
- 5 Timer (Part 1)Document29 pages5 Timer (Part 1)lsuwdaa100% (1)
- 8051 Timer/counter: Hsabaghianb at Kashanu - Ac.ir 1Document109 pages8051 Timer/counter: Hsabaghianb at Kashanu - Ac.ir 1amolmule123No ratings yet
- Difference Between Timers and CounterDocument5 pagesDifference Between Timers and CounterAmit ChauhanNo ratings yet
- 8051 Timer CounterDocument5 pages8051 Timer Countersteffinamorin LNo ratings yet
- Unit-III 8051 Timers, Interrupts and Serial Communication: TH/TL (Timer High/ Timer Low)Document19 pagesUnit-III 8051 Timers, Interrupts and Serial Communication: TH/TL (Timer High/ Timer Low)Rushikesh NandeNo ratings yet
- 8051 Timer CounterDocument8 pages8051 Timer Countermuralimunraj100% (1)
- Timer CountersDocument70 pagesTimer CountersnNo ratings yet
- 8051 TMOD RegisterDocument4 pages8051 TMOD RegisterakshayNo ratings yet
- Module 4Document22 pagesModule 4Rohit AnejaNo ratings yet
- Lec4 8051 Timers CountersDocument10 pagesLec4 8051 Timers CountersOdoch HerbertNo ratings yet
- 8051 CH9 950217Document103 pages8051 CH9 950217Amardeep PotdarNo ratings yet
- 8051 Timer Programming in Assembly and C: ObjectivesDocument17 pages8051 Timer Programming in Assembly and C: Objectivessohail aminNo ratings yet
- 8051 Timer CounterDocument40 pages8051 Timer Counterআশিক পালোয়ানNo ratings yet
- Microcontroller & Its Applications: TimersDocument14 pagesMicrocontroller & Its Applications: Timersmukundiyer_300No ratings yet
- WINSEM2023-24 BECE320E ETH VL2023240504751 2024-03-18 Reference-Material-IDocument53 pagesWINSEM2023-24 BECE320E ETH VL2023240504751 2024-03-18 Reference-Material-IDivya JagwaniNo ratings yet
- Faculty of EngineeringDocument20 pagesFaculty of EngineeringMohammed AliNo ratings yet
- Micro ControllerDocument48 pagesMicro ControllerManjunath ShimogaNo ratings yet
- MMI EL0502 Unit3Document63 pagesMMI EL0502 Unit3Mehran PashaeiNo ratings yet
- 6 8051 TimersDocument45 pages6 8051 TimersharinkhedetNo ratings yet
- Timer - Programming SaDocument7 pagesTimer - Programming SaDK White LionNo ratings yet
- 8051 Timer CounterDocument98 pages8051 Timer CounterpremNo ratings yet
- Module - 4 NotesDocument46 pagesModule - 4 NotesManjuanthNo ratings yet
- Lab4 Timer Counter 8051 2023Document5 pagesLab4 Timer Counter 8051 2023tiennv.22itNo ratings yet
- Class 5 Timer HandoutDocument12 pagesClass 5 Timer Handoutlok171962No ratings yet
- 8051 Timers and Serial Port: Module - 4Document16 pages8051 Timers and Serial Port: Module - 4Pate VishnuNo ratings yet
- WINSEM2023-24 BECE320E ETH VL2023240504751 2024-03-27 Reference-Material-IDocument73 pagesWINSEM2023-24 BECE320E ETH VL2023240504751 2024-03-27 Reference-Material-IDivya JagwaniNo ratings yet
- The 8051 Has Two TimersDocument4 pagesThe 8051 Has Two TimersQWENo ratings yet
- 8051-CH9-TimePmg in Assem & CDocument101 pages8051-CH9-TimePmg in Assem & CshivaspyNo ratings yet
- Timers and Counters Interfacing With 8051Document12 pagesTimers and Counters Interfacing With 8051Faizan RajNo ratings yet
- MPMC - Module - 3 - Part-2Document55 pagesMPMC - Module - 3 - Part-2atharv atreNo ratings yet
- 8051 Timers and Counters: Timer0 Registers Is A 16 Bits Register and Accessed As Low Byte and High Byte. The Low Byte IsDocument4 pages8051 Timers and Counters: Timer0 Registers Is A 16 Bits Register and Accessed As Low Byte and High Byte. The Low Byte IsSHubhamNo ratings yet
- Up Dated Lec#5-8051 Timers-2021Document44 pagesUp Dated Lec#5-8051 Timers-2021Ranz KopaczNo ratings yet
- The 8051 Microcontroller: Timer OperationDocument47 pagesThe 8051 Microcontroller: Timer OperationHạo Tân NgôNo ratings yet
- Timer Serial and InterruptDocument20 pagesTimer Serial and InterruptAyan AcharyaNo ratings yet
- Microprocessor and Microcontroller: Muhammad Faizan MalikDocument50 pagesMicroprocessor and Microcontroller: Muhammad Faizan MalikMuhammad ArsalanNo ratings yet
- 8051 TimerDocument36 pages8051 TimerSanthosh CricketNo ratings yet
- Unit 5-Typed NotesDocument34 pagesUnit 5-Typed NotesAparna durairajNo ratings yet
- Microcontroller (1) Lab Manual: University of Science &technolegy Facualty of Engneering BiomedicalDocument23 pagesMicrocontroller (1) Lab Manual: University of Science &technolegy Facualty of Engneering BiomedicalIyyaasuu YaadataaNo ratings yet
- 8051 Tutorial: Timers: How Does A Timer Count?Document8 pages8051 Tutorial: Timers: How Does A Timer Count?Heyang LiuNo ratings yet
- Lecture 8: TimersDocument3 pagesLecture 8: Timersvtech247No ratings yet
- Microcontroller TimersDocument42 pagesMicrocontroller TimersPatel NeelNo ratings yet
- Ec6504 MPMC Unit 5Document192 pagesEc6504 MPMC Unit 5Gomathi PsNo ratings yet
- Parul Institute of Engineering & Technology: Subject Code:-151001 Name of Subject: - Microcontroller and InterfacingDocument35 pagesParul Institute of Engineering & Technology: Subject Code:-151001 Name of Subject: - Microcontroller and InterfacingSiva CharanNo ratings yet
- 4.9 Timers - Counters in 8051Document11 pages4.9 Timers - Counters in 8051Smarajit MishraNo ratings yet
- Week 5 - Lec - 8051 - Part2 2Document76 pagesWeek 5 - Lec - 8051 - Part2 2basit qureshiNo ratings yet
- Microcontroller TimersDocument16 pagesMicrocontroller TimersjaltitiNo ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Classification of Fruits Using Convolutional Neural Network and Transfer Learning ModelsDocument12 pagesClassification of Fruits Using Convolutional Neural Network and Transfer Learning ModelsAnab MalikNo ratings yet
- Lecture-2: Jump, Loop and Call InstructionsDocument108 pagesLecture-2: Jump, Loop and Call InstructionsAnab MalikNo ratings yet
- 8051 Programming in C: The 8051 Microcontroller and Embedded Systems: Using Assembly and CDocument34 pages8051 Programming in C: The 8051 Microcontroller and Embedded Systems: Using Assembly and CAnab Malik100% (1)
- Numerical Analysis (Core Course) : Derivation ofDocument2 pagesNumerical Analysis (Core Course) : Derivation ofAnab MalikNo ratings yet
- 10 Total Mark: 10 X 1 10: NPTEL Online Certification Courses Indian Institute of Technology KharagpurDocument6 pages10 Total Mark: 10 X 1 10: NPTEL Online Certification Courses Indian Institute of Technology KharagpurvitNo ratings yet
- Quantum Materials Science EngineeringDocument2 pagesQuantum Materials Science Engineeringvisheshp961No ratings yet
- Business Math Report On TaxDocument23 pagesBusiness Math Report On TaxJustine Kaye PorcadillaNo ratings yet
- NICE Guidelines For Dental RecallDocument24 pagesNICE Guidelines For Dental Recallnaomi0% (1)
- MCQ On Rural MarketingDocument28 pagesMCQ On Rural Marketingjaitripathi26No ratings yet
- Wittek Stereo Surround PDFDocument43 pagesWittek Stereo Surround PDFАлександр СидоровNo ratings yet
- Bangladesh Payment & Settlement System PDFDocument18 pagesBangladesh Payment & Settlement System PDFrokib0116No ratings yet
- Traditional Tamil CropsDocument4 pagesTraditional Tamil CropsRahul KumarNo ratings yet
- Corporation Definition - Legal Form of Business That Is Separate From Its Owners.Document39 pagesCorporation Definition - Legal Form of Business That Is Separate From Its Owners.Amalia Tamayo YlananNo ratings yet
- Textile Industry in IndiaDocument97 pagesTextile Industry in IndiaDharmendra B MistryNo ratings yet
- Bollardpull Prediction IB-919 Loaded With IB-909Document14 pagesBollardpull Prediction IB-919 Loaded With IB-909jaap.w.jonkerNo ratings yet
- Structure & Bonding PosterDocument1 pageStructure & Bonding Posterchemyst3167No ratings yet
- HCAD Business & Property Division Calculation GuideDocument51 pagesHCAD Business & Property Division Calculation GuideO'Connor AssociateNo ratings yet
- Grade 11 Provincial Examination Mathematics P1 (English) June 2022 Question PaperDocument7 pagesGrade 11 Provincial Examination Mathematics P1 (English) June 2022 Question PaperSiyamtanda DlangaNo ratings yet
- Modular OT WorksDocument67 pagesModular OT WorksNandagopal DhakshinamoorthyNo ratings yet
- Nanomaterials 07 00074 PDFDocument47 pagesNanomaterials 07 00074 PDFmudassir_hasan_1No ratings yet
- SPHE1003Ax PDFDocument29 pagesSPHE1003Ax PDFGuillermito PelosiNo ratings yet
- Manual Tornado e Tornado RC MonitorDocument20 pagesManual Tornado e Tornado RC MonitorJoao Paulo mecanicaNo ratings yet
- Data Sheet 6ED1052-1MD08-0BA0: DisplayDocument2 pagesData Sheet 6ED1052-1MD08-0BA0: DisplayessameldinNo ratings yet
- 23 January - UGV Working ProgrammeDocument3 pages23 January - UGV Working ProgrammeJoão Ricardo NunesNo ratings yet
- Eka Bangun Utomo: EducationDocument1 pageEka Bangun Utomo: EducationEKANo ratings yet
- S-000-535Z-002 - 2 HvacDocument64 pagesS-000-535Z-002 - 2 HvacMidhun K ChandraboseNo ratings yet
- Lesson 2. The Tourist Market and SegmentationDocument13 pagesLesson 2. The Tourist Market and SegmentationDonna BanuagNo ratings yet
- 5 Irver Punhab & OdishaDocument19 pages5 Irver Punhab & OdishasanchitNo ratings yet
- Struktol RP 17 MSDS PDFDocument7 pagesStruktol RP 17 MSDS PDFSimonNo ratings yet
- Lost Links and Mid Air Collisions-The Problems With Domestic DronesDocument105 pagesLost Links and Mid Air Collisions-The Problems With Domestic DronesEyemanProphetNo ratings yet
- Anusha SSIHL Admission PDFDocument6 pagesAnusha SSIHL Admission PDFRajagopalan SNo ratings yet
- Instructor'S Guide To Teaching Solidworks Software Lesson 10Document27 pagesInstructor'S Guide To Teaching Solidworks Software Lesson 10Rafael Diaz RomeroNo ratings yet