Download as pdf or txt
You might also like
- AST-V57-Sem1-S24015 Classical MechanicsDocument287 pagesAST-V57-Sem1-S24015 Classical MechanicsManoj Ghagas100% (1)
- Leech Classical MechanicDocument158 pagesLeech Classical MechanicMoisés Pereira0% (1)
- Lab Report: Dynamic Analysis and Control On Single Machine Infinite Bus SystemDocument10 pagesLab Report: Dynamic Analysis and Control On Single Machine Infinite Bus SystemJack SheehyNo ratings yet
- Regularization For Deep Learning: Tsz-Chiu Au Chiu@unist - Ac.krDocument100 pagesRegularization For Deep Learning: Tsz-Chiu Au Chiu@unist - Ac.krwild yellowNo ratings yet
- Regularization For Deep Learning: Tsz-Chiu Au Chiu@unist - Ac.krDocument100 pagesRegularization For Deep Learning: Tsz-Chiu Au Chiu@unist - Ac.krwild yellowNo ratings yet
- Phys 302301 MT1 - F23 With SolutionsDocument8 pagesPhys 302301 MT1 - F23 With SolutionsabdullahelnahhasNo ratings yet
- Tutorial2 Concept and Exercises of Electrostatics 0219Document16 pagesTutorial2 Concept and Exercises of Electrostatics 0219Rakib Al MahdiNo ratings yet
- Electromagnetic Theory Basic PDFDocument29 pagesElectromagnetic Theory Basic PDFPranay ShuklaNo ratings yet
- Qoqi 3 PDFDocument59 pagesQoqi 3 PDFlolopopo28No ratings yet
- Subatomic Physics: Nuclear Physics Part: Profe. Carolina PinillaDocument24 pagesSubatomic Physics: Nuclear Physics Part: Profe. Carolina PinillaFrancisco Javier Rodriguez LanzaNo ratings yet
- Logistic Regression-4Document20 pagesLogistic Regression-4Amelie GriffithNo ratings yet
- Week 4 Lecture Slides PDFDocument49 pagesWeek 4 Lecture Slides PDFTanapat LapanunNo ratings yet
- Maximum Likelihood Method: MLM: pick α to maximize the probability of getting the measurements (the x 's) that we did!Document8 pagesMaximum Likelihood Method: MLM: pick α to maximize the probability of getting the measurements (the x 's) that we did!Gharib MahmoudNo ratings yet
- Quantum Dots As Qubits F. RaffoneDocument55 pagesQuantum Dots As Qubits F. RaffoneHayam RamadanNo ratings yet
- Computational Data Analysis: Machine LearningDocument26 pagesComputational Data Analysis: Machine LearningVikash MovvaNo ratings yet
- Curvefitting PDFDocument6 pagesCurvefitting PDFRanju Marma RmsNo ratings yet
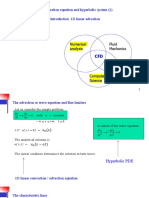
- The Advection Equation and Hyperbolic System (1) Introduction: 1D Linear AdvectionDocument17 pagesThe Advection Equation and Hyperbolic System (1) Introduction: 1D Linear Advection刘伟轩No ratings yet
- Fourier SeriesDocument18 pagesFourier SeriesPaul Bryan GuanNo ratings yet
- Air Heater SystemDocument25 pagesAir Heater SystemgvkovindNo ratings yet
- Week 1 PDFDocument41 pagesWeek 1 PDFTanapat LapanunNo ratings yet
- Statistical Physics (MSC Phy) 5Document5 pagesStatistical Physics (MSC Phy) 5SACHIN VISHWAKARMANo ratings yet
- Stochas (C Price ModelsDocument36 pagesStochas (C Price ModelsVible VargheseNo ratings yet
- L11Document25 pagesL11eekobi03No ratings yet
- L09 DFT FFTDocument23 pagesL09 DFT FFTtirumareddybhavyaNo ratings yet
- Derivation of The Model of A ThreeDocument6 pagesDerivation of The Model of A ThreeEmanuel Morales RergisNo ratings yet
- DifferentiationDocument75 pagesDifferentiationGerlyn SunNo ratings yet
- Optimumengineeringdesign Day3aDocument34 pagesOptimumengineeringdesign Day3aSantiago Garrido BullónNo ratings yet
- Lec4 Vector Spaces. Basis and DimensionDocument56 pagesLec4 Vector Spaces. Basis and Dimensionansat5.ansatNo ratings yet
- Week 3 PDFDocument32 pagesWeek 3 PDFTanapat LapanunNo ratings yet
- Dynamic Model of Robots:: Robotics 2Document30 pagesDynamic Model of Robots:: Robotics 2kevinNo ratings yet
- Stats101A - Chapter 3Document54 pagesStats101A - Chapter 3Zhen WangNo ratings yet
- Lecture 13-MDOF SystemDocument21 pagesLecture 13-MDOF Systemgl9751No ratings yet
- Unit 6 - Z-Transforms - Signals and SystemsDocument15 pagesUnit 6 - Z-Transforms - Signals and SystemsMuhammad sarfrazNo ratings yet
- Lecture 1Document4 pagesLecture 1Debayan BiswasNo ratings yet
- 05 LagrangianDynamics 3Document36 pages05 LagrangianDynamics 3Music NonstopNo ratings yet
- Dynamic Model of Robots: Lagrangian Approach: Robotics 2Document28 pagesDynamic Model of Robots: Lagrangian Approach: Robotics 2kevinNo ratings yet
- Phys42200 Lecture20Document26 pagesPhys42200 Lecture20jonny.platters34No ratings yet
- Lyapunov Stability Theory: y G X y F X F X yDocument15 pagesLyapunov Stability Theory: y G X y F X F X yshakti sindhuNo ratings yet
- 3e - Implementation - Linear StaticsDocument20 pages3e - Implementation - Linear Staticscharlottekiel12No ratings yet
- Lecture 04Document38 pagesLecture 04bensonwong427No ratings yet
- CurvefittingDocument14 pagesCurvefittingMohammed FouadNo ratings yet
- Calculus Cheat Sheet AllDocument11 pagesCalculus Cheat Sheet AllDr Milan Glendza Petrovic NjegosNo ratings yet
- OLMPDocument28 pagesOLMPSiyu LiuNo ratings yet
- PEP 2021 Phase 2 Selection Test 5 SolutionDocument9 pagesPEP 2021 Phase 2 Selection Test 5 SolutionMarcus PoonNo ratings yet
- DesignDocument13 pagesDesignGrigoriy KotNo ratings yet
- Lecture 8Document4 pagesLecture 8SACHIN VISHWAKARMANo ratings yet
- Aircraft Flight Dynamics: at The End of The Course, You Should Be Able ToDocument23 pagesAircraft Flight Dynamics: at The End of The Course, You Should Be Able ToAntony BalabanNo ratings yet
- BMEN383 AxialLoad updatedClassNotes 2024 0111Document29 pagesBMEN383 AxialLoad updatedClassNotes 2024 0111Iremide AinaNo ratings yet
- 1 Vector CalculusDocument16 pages1 Vector Calculusమత్సా చంద్ర శేఖర్No ratings yet
- Lesson 7 Transformation by Trigonometric FormulasDocument14 pagesLesson 7 Transformation by Trigonometric FormulasMarvin James JaoNo ratings yet
- Complex Functions & Mappings: 8023010-4: Advanced Engineering MathematicsDocument20 pagesComplex Functions & Mappings: 8023010-4: Advanced Engineering MathematicsHatem QUNo ratings yet
- EE 205 Lecture 33Document17 pagesEE 205 Lecture 33Akshat SharmaNo ratings yet
- Chapter 1 MathDocument44 pagesChapter 1 MathRajendra Kumar Yadav100% (1)
- Hopfield ExampleDocument10 pagesHopfield ExampleSun BirdsNo ratings yet
- 07 EnsembleDocument21 pages07 Ensemble林山山No ratings yet
- Vector Calculus and Its ApplicationsDocument22 pagesVector Calculus and Its ApplicationsMidhun MNo ratings yet
- Geometric Transformations in OpenGLDocument44 pagesGeometric Transformations in OpenGLWinnie TandaNo ratings yet
- CircularDrum Oct12 2023-1Document11 pagesCircularDrum Oct12 2023-1catzhaoNo ratings yet
- Mam 5204 System Dynamics PR 20210410Document61 pagesMam 5204 System Dynamics PR 20210410İsmail BozkurtNo ratings yet
- Elt Teo-32Document1 pageElt Teo-32Kevin YanaNo ratings yet
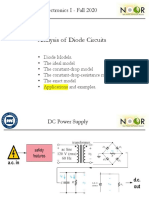
- Analysis of Diode Circuits: Electronics I - Fall 2020Document17 pagesAnalysis of Diode Circuits: Electronics I - Fall 2020Eren CetinNo ratings yet
- Learn Python through Nursery Rhymes and Fairy Tales: Classic Stories Translated into Python Programs (Coding for Kids and Beginners)From EverandLearn Python through Nursery Rhymes and Fairy Tales: Classic Stories Translated into Python Programs (Coding for Kids and Beginners)Rating: 5 out of 5 stars5/5 (1)
- Lectures On Classical Mechanics-1Document4 pagesLectures On Classical Mechanics-1Abhijit Kar Gupta100% (6)
- Classical Mechanics - Prof. Dipan Kumar GhoshDocument183 pagesClassical Mechanics - Prof. Dipan Kumar GhoshTushar GoyalNo ratings yet
- Holonomic and Nonholonomic Constraints: MEAM 535Document28 pagesHolonomic and Nonholonomic Constraints: MEAM 535harasNo ratings yet
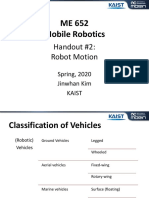
- ME 652 Mobile Robotics: Handout #2: Robot MotionDocument30 pagesME 652 Mobile Robotics: Handout #2: Robot MotionSumit MishraNo ratings yet
- RRT and RRT - Star Using Vehicle DynamicsDocument5 pagesRRT and RRT - Star Using Vehicle DynamicsMinh Truyền ĐỗNo ratings yet
- Lagrangian Formulation (Part 1)Document11 pagesLagrangian Formulation (Part 1)Myself GamerNo ratings yet
- Lectures On Analytical Mechanics (Gantmacher)Document132 pagesLectures On Analytical Mechanics (Gantmacher)DjokoNo ratings yet
- Lectures On Classical Mechanics1 PDFDocument3 pagesLectures On Classical Mechanics1 PDFehsanyari1100% (1)
- Energy Methods in Applies Mechanics - LnghaarDocument377 pagesEnergy Methods in Applies Mechanics - LnghaarSayed Ayesha100% (1)
- Principles of Robot Autonomy I: Course Overview, Mobile Robot KinematicsDocument24 pagesPrinciples of Robot Autonomy I: Course Overview, Mobile Robot KinematicsratjerryNo ratings yet
- Langrangian HamiltonDocument277 pagesLangrangian HamiltonkeepingbusyNo ratings yet
- Geometry, Mechanics, and Dynamics: Dong Eui Chang Darryl D. Holm George Patrick Tudor Ratiu EditorsDocument506 pagesGeometry, Mechanics, and Dynamics: Dong Eui Chang Darryl D. Holm George Patrick Tudor Ratiu EditorsEmiRB 99No ratings yet
- Classical Mechanics - NotesDocument84 pagesClassical Mechanics - Notessupinder singhNo ratings yet
- Kinematic Models and ConstraintsDocument43 pagesKinematic Models and Constraintsanitha_eswaranNo ratings yet
- PME5010 - Sistemas Não HolônomosDocument39 pagesPME5010 - Sistemas Não HolônomosEmerson Borges SantanaNo ratings yet
- Analytical Mechanics For Spacecraft Dynamics - CourseraDocument10 pagesAnalytical Mechanics For Spacecraft Dynamics - Courseranathanangelo254No ratings yet
- Lagrange EoMDocument32 pagesLagrange EoMSarim RazaNo ratings yet
- Constraints 1Document9 pagesConstraints 1praveen99944100% (2)
- Phy 301 Classical MechanicsDocument100 pagesPhy 301 Classical MechanicsGabriel EgrinyaNo ratings yet
- Ilya Kolmanovsky And: N. Harris McclamrochDocument17 pagesIlya Kolmanovsky And: N. Harris McclamrochJhonatan CondoriNo ratings yet
- Generalized Princilpe of DynamicsDocument36 pagesGeneralized Princilpe of DynamicsshreedharkolekarNo ratings yet
- J. Angeles, A. Kecskeméthy (Eds.) - Kinematics and Dynamics of Multi-BodDocument344 pagesJ. Angeles, A. Kecskeméthy (Eds.) - Kinematics and Dynamics of Multi-BodBẢO HỒ THIÊNNo ratings yet