Download as pdf or txt
You might also like
- 2005 Volkswagen New Beetle Aut Transmission 4 Speed 01MDocument270 pages2005 Volkswagen New Beetle Aut Transmission 4 Speed 01MWilmer Huanga100% (3)
- VXT - Open Type Cooling TowerDocument24 pagesVXT - Open Type Cooling Tower54321A0% (1)
- 690C.D WD PDFDocument134 pages690C.D WD PDFYosmeli Zapata100% (1)
- Mega Ohm Box 2022Document1 pageMega Ohm Box 2022SOURABH JAINNo ratings yet
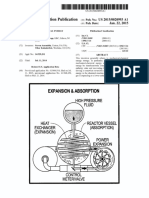
- Patent Application Publication (10) Pub. No.: US 2008/0237199 A1Document9 pagesPatent Application Publication (10) Pub. No.: US 2008/0237199 A1பிரபாகரன் ஆனந்தன்No ratings yet
- 2010 - Us7721821 - Underground Boring Machine and Method For Controlling Underground BoringDocument13 pages2010 - Us7721821 - Underground Boring Machine and Method For Controlling Underground BoringCường Nguyễn QuốcNo ratings yet
- US20150020993A1Document39 pagesUS20150020993A1Gavin SoccorsoNo ratings yet
- 09 em 002Document6 pages09 em 002Zelva ChileNo ratings yet
- Img 20230907 0001Document1 pageImg 20230907 0001mehedi hasanNo ratings yet
- United States Patent (19) : Dooley Et AlDocument6 pagesUnited States Patent (19) : Dooley Et AlSurahmanNo ratings yet
- MOV DatasheetDocument98 pagesMOV Datasheetsrik11No ratings yet
- RM 46Document58 pagesRM 46ingen88888No ratings yet
- Experimental Determination of Low Speed Diesel Engine Crankshaft TwistingDocument7 pagesExperimental Determination of Low Speed Diesel Engine Crankshaft TwistingBui Duy ThanhNo ratings yet
- Failure Criticality Analysis Using Fishikawa Diagram (A Case Study of Dumpers at Ocp, Ramagundam)Document7 pagesFailure Criticality Analysis Using Fishikawa Diagram (A Case Study of Dumpers at Ocp, Ramagundam)Ashis DasNo ratings yet
- Design Calculation: Larsen & Toubro Limited ECC Division - EDRCDocument16 pagesDesign Calculation: Larsen & Toubro Limited ECC Division - EDRCSantoshNo ratings yet
- 64-cbc Temp Controller Calibration CartificateDocument1 page64-cbc Temp Controller Calibration CartificateCustomer SupportNo ratings yet
- Data Sheet Janbacher G08000567Document3 pagesData Sheet Janbacher G08000567zhax.rus2014No ratings yet
- Peng's 1995-1997 US Patent #5642275Document18 pagesPeng's 1995-1997 US Patent #5642275fangzpengNo ratings yet
- Webco 3rd Party Monitoring Audit Report - Rev 9 18 2015Document7 pagesWebco 3rd Party Monitoring Audit Report - Rev 9 18 2015virous08No ratings yet
- BrzdyDocument206 pagesBrzdyLotfi Ben SlimNo ratings yet
- Failure Analysis Report: (Generation Company)Document13 pagesFailure Analysis Report: (Generation Company)johnlavuNo ratings yet
- 2reee Si.: It IsDocument6 pages2reee Si.: It Isjai2009No ratings yet
- Analysis and Experimental Research On The Influence of VVT Point Selection On Exhaust Temperature in Low Speed Operating ConditionsDocument8 pagesAnalysis and Experimental Research On The Influence of VVT Point Selection On Exhaust Temperature in Low Speed Operating Conditionsrosca raulNo ratings yet
- Work InstructionsDocument3 pagesWork InstructionssseamitvermaNo ratings yet
- ITP 935 MV Switchgears - Rev 1Document6 pagesITP 935 MV Switchgears - Rev 1Zaid RNo ratings yet
- Ads QT 24 0233-R2Document4 pagesAds QT 24 0233-R2HimabinduYamaliNo ratings yet
- Al Tronic Ill-Cpu Medium Engines, 2 16 Cylinders Service Instructions FORM Alii-CPU SL 4-91Document8 pagesAl Tronic Ill-Cpu Medium Engines, 2 16 Cylinders Service Instructions FORM Alii-CPU SL 4-91SMcNo ratings yet
- CEEP-EM-24-258 DHHDHGD HDocument2 pagesCEEP-EM-24-258 DHHDHGD HtestingamesimpexNo ratings yet
- E019 MV Breaker Function TestDocument10 pagesE019 MV Breaker Function TestMusab ShabbirNo ratings yet
- Accent P0012 Camshaft Position-Timing Over-Retarded (Bank 1)Document5 pagesAccent P0012 Camshaft Position-Timing Over-Retarded (Bank 1)flash_24014910No ratings yet
- MV Breakers Maintenance: ChecklistDocument1 pageMV Breakers Maintenance: ChecklisttoolsboxNo ratings yet
- Arr PK-GJR 03 September 2020 RonhlpDocument3 pagesArr PK-GJR 03 September 2020 RonhlpDwiky Alif SatriaNo ratings yet
- United States Patent (10) Patent No.: US 9,178.423 B2Document11 pagesUnited States Patent (10) Patent No.: US 9,178.423 B2Nihar RoyNo ratings yet
- S2111-600-005JS Ele - Load Analysis A0Document10 pagesS2111-600-005JS Ele - Load Analysis A0Cornea IonutNo ratings yet
- Ignition ControlDocument48 pagesIgnition ControlYdelkadiasmela Dominguezmorel100% (1)
- Kocstandard FOR Indirect Type Oil Heaters DOC. NO. KOC-MV - 009Document42 pagesKocstandard FOR Indirect Type Oil Heaters DOC. NO. KOC-MV - 009Praveen Babu100% (1)
- Koc Standard For Low Voltage Switchgear DOC. NO. KOC-E-009: Standards PublicationDocument45 pagesKoc Standard For Low Voltage Switchgear DOC. NO. KOC-E-009: Standards Publicationinb100% (1)
- Westinghouse Lighting VB-15 Series Roadway Spec Sheet 3-72Document2 pagesWestinghouse Lighting VB-15 Series Roadway Spec Sheet 3-72Alan MastersNo ratings yet
- QsolDocument3 pagesQsolМаксим СабировNo ratings yet
- Relay CoordinationDocument160 pagesRelay Coordinationchidambaram32100% (4)
- Circuit Diagram For Brake Test On D.C.Shunt Motor: EM1 LAB, BVCR, RAJAHMUNDRY Prepared by K. Nagesh & V.D.NeelimaDocument4 pagesCircuit Diagram For Brake Test On D.C.Shunt Motor: EM1 LAB, BVCR, RAJAHMUNDRY Prepared by K. Nagesh & V.D.NeelimaPrabhu MoorthyNo ratings yet
- m9447 PipDocument7 pagesm9447 PipalexastuvilcaNo ratings yet
- Examination Data Sheet: Walter TostoDocument3 pagesExamination Data Sheet: Walter TostoasdasdasdasdNo ratings yet
- Techtop Catgen2018 En-Rev21-2 1Document108 pagesTechtop Catgen2018 En-Rev21-2 1Musa KesedzijaNo ratings yet
- DG Set ManualDocument58 pagesDG Set ManualAMIT VIJAYVARGINo ratings yet
- MTBFDocument3 pagesMTBFParthiban GNo ratings yet
- Herramientas Especiales para Autos EVDocument13 pagesHerramientas Especiales para Autos EVlarissa estrada0% (1)
- 2023 Mbi QS NDC2 065Document2 pages2023 Mbi QS NDC2 065Dave Laryll SantosNo ratings yet
- Koc e 007 - 1Document58 pagesKoc e 007 - 1inbNo ratings yet
- Brake Test On DC Shunt MotorDocument5 pagesBrake Test On DC Shunt MotorkudupudinageshNo ratings yet
- Manual de Servicio Tuk Tuk Pag 1 A 40Document40 pagesManual de Servicio Tuk Tuk Pag 1 A 40edsh200417No ratings yet
- 0260-135-PVM-U-001-02 Thermal Design of CTDocument14 pages0260-135-PVM-U-001-02 Thermal Design of CTanil peralaNo ratings yet
- Calculation and Specification of Generator & Shore ConnectionDocument15 pagesCalculation and Specification of Generator & Shore ConnectionMuzami ThahirNo ratings yet
- Paint Report WO-1753 & 1755Document5 pagesPaint Report WO-1753 & 1755naushad.mad16No ratings yet
- Datasheet Motor Faj 7 y 9Document7 pagesDatasheet Motor Faj 7 y 9Danny Javes PeredaNo ratings yet
- Transformer Testing For New 10mva Power Transfomer: Batangas Ii Electric Cooperative (Batelec Ii)Document4 pagesTransformer Testing For New 10mva Power Transfomer: Batangas Ii Electric Cooperative (Batelec Ii)Edmar BataqueNo ratings yet
- Cumming Parts Catalog PM Qsb6 7 GBDocument9 pagesCumming Parts Catalog PM Qsb6 7 GBsteven100% (65)
- 170300917sha-001 1PDocument91 pages170300917sha-001 1PAlejandro Pedro Mundaca MalcaNo ratings yet
- Dynamometer: Theory and Application to Engine TestingFrom EverandDynamometer: Theory and Application to Engine TestingNo ratings yet
- Mechanical Properties and Performance of Engineering Ceramics and Composites X: A Collection of Papers Presented at the 39th International Conference on Advanced Ceramics and CompositesFrom EverandMechanical Properties and Performance of Engineering Ceramics and Composites X: A Collection of Papers Presented at the 39th International Conference on Advanced Ceramics and CompositesDileep SinghNo ratings yet
- Aircraft Electromagnetic Compatibility: DOT/FAA/CT-86/40Document146 pagesAircraft Electromagnetic Compatibility: DOT/FAA/CT-86/40sathiskumarBENo ratings yet
- Aircraft Electromagnetic Compatibility: DOT/FAA/CT-86/40Document146 pagesAircraft Electromagnetic Compatibility: DOT/FAA/CT-86/40sathiskumarBENo ratings yet
- Govpub C13Document32 pagesGovpub C13sathiskumarBENo ratings yet
- A Particle Swarm Optimization (PSO) PrimerDocument16 pagesA Particle Swarm Optimization (PSO) PrimersathiskumarBENo ratings yet
- Programs: 1.program To Display A Message "Hello, World"Document8 pagesPrograms: 1.program To Display A Message "Hello, World"sathiskumarBENo ratings yet
- CertificateInstance$QrLMamUJE Qy YI46QX7qqOJzT9wSNFQ96 - FlQeRCYM$$Document1 pageCertificateInstance$QrLMamUJE Qy YI46QX7qqOJzT9wSNFQ96 - FlQeRCYM$$Florian TacheNo ratings yet
- General Physics 1: ACTIVITY/ANSWER SHEET: Quarter 2Document1 pageGeneral Physics 1: ACTIVITY/ANSWER SHEET: Quarter 2Kashima KotaroNo ratings yet
- Performance Indicators in A Service Supply ChainDocument7 pagesPerformance Indicators in A Service Supply ChainTI Journals Publishing100% (1)
- Simple Stress PDFDocument18 pagesSimple Stress PDFJohn Philip NadalNo ratings yet
- Fluent-Intro 16.0 L02 IntroCFD PDFDocument45 pagesFluent-Intro 16.0 L02 IntroCFD PDFAnonymous 8209ZTNo ratings yet
- 14) Chilled Water Plant Efficiency 1Document33 pages14) Chilled Water Plant Efficiency 1Ooi Tze HoongNo ratings yet
- Cv&experience Certificate Senior Electrical EngineerDocument20 pagesCv&experience Certificate Senior Electrical EngineerRAedNo ratings yet
- A Solution For Preventing Fouling in CFBC Boiler by K.K.parthibanDocument30 pagesA Solution For Preventing Fouling in CFBC Boiler by K.K.parthibanparthi20065768100% (2)
- SG 248158Document280 pagesSG 248158Mostafa HassanNo ratings yet
- Proforma Invoice - Npoly - 24.01.24Document4 pagesProforma Invoice - Npoly - 24.01.24npengineering4No ratings yet
- Leeden Safety Catalogue 2010 - Personal ProtectionDocument44 pagesLeeden Safety Catalogue 2010 - Personal ProtectionNavin ChandrasekaranNo ratings yet
- Planer 6989704 enUS Om 05-14Document94 pagesPlaner 6989704 enUS Om 05-14Jay Sambero100% (3)
- Comparison of UCA 2Document6 pagesComparison of UCA 2gjd2008No ratings yet
- Table 1Document30 pagesTable 1Akanksha BokareNo ratings yet
- ALE-STRUC-Pag-Asa Steel 2021Document2 pagesALE-STRUC-Pag-Asa Steel 2021Jo-anne RiveraNo ratings yet
- Sprint Cementing Double Pumper - Wb2600: Sprint Oil & Gas ServicesDocument2 pagesSprint Cementing Double Pumper - Wb2600: Sprint Oil & Gas ServicesKarwanBarzngyNo ratings yet
- Pressure Measurement (Project Standards and Specifications) : KLM Technology GroupDocument6 pagesPressure Measurement (Project Standards and Specifications) : KLM Technology GroupTolera WorkuNo ratings yet
- Hyvest Ultra Guard LaunchDocument15 pagesHyvest Ultra Guard LaunchShouvik DasNo ratings yet
- Features: Standard TypeDocument7 pagesFeatures: Standard Typehernan alejandro bohorquez salasNo ratings yet
- Record Power SDS150 ManualDocument20 pagesRecord Power SDS150 Manualrobberry99No ratings yet
- CBT QustionDocument3 pagesCBT Qustionneelapu mahesh reddyNo ratings yet
- BBS 210A & RCC Retaining Wall LHS Section A2 Side - 044907Document26 pagesBBS 210A & RCC Retaining Wall LHS Section A2 Side - 044907Deep NamataNo ratings yet
- Load TestDocument35 pagesLoad Testdhee2608No ratings yet
- Electrogravimetry and CoulometryDocument38 pagesElectrogravimetry and CoulometryJosipa lNo ratings yet
- Sulfate Ion in Brackish Water, Seawater, and Brines: Standard Test Method ForDocument3 pagesSulfate Ion in Brackish Water, Seawater, and Brines: Standard Test Method Forsaifullah629No ratings yet
- Colour and SoundDocument33 pagesColour and SoundChristopherwalkerNo ratings yet
- Caribbean Controls InstructionsDocument3 pagesCaribbean Controls InstructionsWesley W. GarlandNo ratings yet
- En10272 PDFDocument42 pagesEn10272 PDFLambertWayneNo ratings yet
- Seaward PR 15DDocument2 pagesSeaward PR 15Dmuhdshafiq12No ratings yet