Download as pdf or txt
You might also like
- MasteringPhysics ME12001 Thermodynamics Homework T5Document23 pagesMasteringPhysics ME12001 Thermodynamics Homework T5gdfeiu dionwdn75% (4)
- Switching Power Supply Design: A Concise Practical HandbookFrom EverandSwitching Power Supply Design: A Concise Practical HandbookNo ratings yet
- QUBE-Servo 2 First Principles Modeling Workbook (Student)Document6 pagesQUBE-Servo 2 First Principles Modeling Workbook (Student)Albert ForeroNo ratings yet
- Waukesha LTC TheoryDocument60 pagesWaukesha LTC TheoryElafan100% (1)
- ADocument150 pagesARossana Agustin100% (3)
- Computing Heat Losses PDFDocument9 pagesComputing Heat Losses PDFgyani1982No ratings yet
- Topic 9 Control of DC MachinesDocument41 pagesTopic 9 Control of DC Machinescemefi7580No ratings yet
- Woup DS2 HBP Ea 1380 0003 - 001Document5 pagesWoup DS2 HBP Ea 1380 0003 - 001胡子No ratings yet
- Exam WS2016Document4 pagesExam WS2016Chintan GhelaniNo ratings yet
- EE462 Lab Assignement 1Document14 pagesEE462 Lab Assignement 1Terry rickyNo ratings yet
- 04-Grounding and Lightning Prot. Calc.-25-Nov.-2021Document36 pages04-Grounding and Lightning Prot. Calc.-25-Nov.-2021mohammed aliNo ratings yet
- 2024 Speed - Control - V - F - V - FDocument55 pages2024 Speed - Control - V - F - V - FAhmed MahmoudNo ratings yet
- WK2Document3 pagesWK2shahqazwsxNo ratings yet
- (Journal of Agricultural Engineering Research Vol. 19 Iss. 2) Kolozsi, McCarthy - The Prediction of Tractor Field Performance (1974)Document6 pages(Journal of Agricultural Engineering Research Vol. 19 Iss. 2) Kolozsi, McCarthy - The Prediction of Tractor Field Performance (1974)Sergey ZlenkoNo ratings yet
- Boat ImpactDocument5 pagesBoat ImpactStephen KokoNo ratings yet
- CYCLE-2:Experiment 1 Steady-State Performance of A 3-Phase Induction MotorDocument32 pagesCYCLE-2:Experiment 1 Steady-State Performance of A 3-Phase Induction MotorSumit SinghNo ratings yet
- SMPSDocument7 pagesSMPSHarbeer BerwalNo ratings yet
- Isolated Multiple Output Flyback Converter Design Using TL494Document25 pagesIsolated Multiple Output Flyback Converter Design Using TL494lordgtyNo ratings yet
- Ethics. Slides (7) P1Document17 pagesEthics. Slides (7) P1Mohamed Essam HusseinNo ratings yet
- Classes of Motor DutyDocument20 pagesClasses of Motor DutyvishnuNo ratings yet
- Torque - Slip Characteristic of A Three - Phase Induction MachineDocument28 pagesTorque - Slip Characteristic of A Three - Phase Induction MachineAli AltahirNo ratings yet
- IsqT Algorithm Application NotesDocument2 pagesIsqT Algorithm Application NotespaultanasescuNo ratings yet
- Air Compressed Vehicle: Shubhamsuryawanshi, Yashbharade, Pratik Shetkar, ChetanpakhaleDocument10 pagesAir Compressed Vehicle: Shubhamsuryawanshi, Yashbharade, Pratik Shetkar, ChetanpakhaleankNo ratings yet
- National Institute of Technology, Delhi: Department of Electrical & Electronics EngineeringDocument6 pagesNational Institute of Technology, Delhi: Department of Electrical & Electronics EngineeringKomal SinghNo ratings yet
- Acsr Panther Conductor Sizing Xls 0 PDFDocument6 pagesAcsr Panther Conductor Sizing Xls 0 PDFRavindra GoyalNo ratings yet
- Switching Power Supply Design: A Concise Practical Handbook: February 2022Document5 pagesSwitching Power Supply Design: A Concise Practical Handbook: February 2022Wolfy gacha elamparoNo ratings yet
- Single Strand Top Roller Chain Conveyor and Motor CalculationDocument5 pagesSingle Strand Top Roller Chain Conveyor and Motor CalculationDeepak GiriNo ratings yet
- Stator and Rotor Currents Analysis Of: The Inverted Rotor Induction MotorDocument6 pagesStator and Rotor Currents Analysis Of: The Inverted Rotor Induction MotorChenaker HamzaNo ratings yet
- Turning Moment Diagram FlywheelDocument88 pagesTurning Moment Diagram FlywheelJose Antonio Castillo GonzálezNo ratings yet
- Switching Power Supply Design: A Concise Practical Handbook: February 2022Document5 pagesSwitching Power Supply Design: A Concise Practical Handbook: February 2022Juan Gil RocaNo ratings yet
- MSFO-1255: W210 Switchgear Design Department 5,000 Teu Class Container CarrierDocument31 pagesMSFO-1255: W210 Switchgear Design Department 5,000 Teu Class Container CarrierАлексей ПетренкоNo ratings yet
- Induction MotorDocument28 pagesInduction Motorsumithra100% (2)
- CSEProT170 - 1 DifferentialDocument9 pagesCSEProT170 - 1 Differentialtesting.rndNo ratings yet
- Kramer DriveDocument42 pagesKramer DriveSenthil Kumar100% (1)
- 2.0 Fault LevelDocument23 pages2.0 Fault Levelrathaurs100% (2)
- A Smart Approach For Design of Digitally Controlled Multiple-Output DC-DC ConverterDocument6 pagesA Smart Approach For Design of Digitally Controlled Multiple-Output DC-DC Convertert.benaissaNo ratings yet
- Creep Calculation by Colin Bayliss & Brain HardyDocument1 pageCreep Calculation by Colin Bayliss & Brain HardyVenkatasubramanian Iyer100% (1)
- User's Manual: D.C. Motor StudyDocument18 pagesUser's Manual: D.C. Motor Studysurendra parlaNo ratings yet
- Introduction To Motor DrivesDocument24 pagesIntroduction To Motor Drivessukhbat sodnomdorjNo ratings yet
- Fric%on Clutches Fric%on Clutches: μ P D d D d μ PDocument2 pagesFric%on Clutches Fric%on Clutches: μ P D d D d μ PAditya Varma YalamanchiliNo ratings yet
- Catalog DC MOTORDocument20 pagesCatalog DC MOTORherdazu13No ratings yet
- Model 17415Document20 pagesModel 17415sahil satputeNo ratings yet
- SimlabDocument32 pagesSimlabAkbar AliNo ratings yet
- Design Process of Rotating Electrical MachinesDocument28 pagesDesign Process of Rotating Electrical MachinesAli HashemiNo ratings yet
- TOR CRENT EMF - 66cea157a5cd594a8288b820Document12 pagesTOR CRENT EMF - 66cea157a5cd594a8288b820Harnam Singh DhillonNo ratings yet
- 17 Permanent Magnet Motor DesignDocument41 pages17 Permanent Magnet Motor DesignMehmet Kırgözoğlu100% (4)
- Taking Up A Characteristic of A Centrifugal Compressor With An Adjustable Inlet Guide GridDocument21 pagesTaking Up A Characteristic of A Centrifugal Compressor With An Adjustable Inlet Guide GridJIGAR SURA100% (3)
- PowerSystem Set2Document12 pagesPowerSystem Set2Sushupthi R KoushikNo ratings yet
- MVA Method To Calculate Fault CurrentDocument14 pagesMVA Method To Calculate Fault CurrentOoi Ban JuanNo ratings yet
- Anexo 4: Fig. 8: Desplazamiento Por La Primera Resonancia de La EstructuraDocument15 pagesAnexo 4: Fig. 8: Desplazamiento Por La Primera Resonancia de La EstructuraDenis GuzmánNo ratings yet
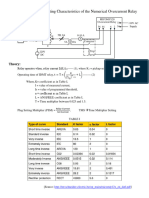
- Numerical Overcurrent Relay and Relay CoordinationDocument7 pagesNumerical Overcurrent Relay and Relay Coordinationvoyimat216No ratings yet
- Seismic Staad Results Three Storey ResidentialDocument9 pagesSeismic Staad Results Three Storey ResidentialMark Roger Huberit IINo ratings yet
- Lecture Note - ED - Speed Control of IMDocument5 pagesLecture Note - ED - Speed Control of IMsashaikhNo ratings yet
- EEN 350 Spring 2019 Formula Sheet Last PartDocument2 pagesEEN 350 Spring 2019 Formula Sheet Last PartMario ArjaNo ratings yet
- Crown Shim & Stabbing SCFDocument9 pagesCrown Shim & Stabbing SCFRajat KatyalNo ratings yet
- Dynamic Torque MeasurementDocument8 pagesDynamic Torque MeasurementDanNo ratings yet
- Motor Sizing Principles 3Document2 pagesMotor Sizing Principles 3Anesu ChimhowaNo ratings yet
- LLLLLL,, TP: 9lROE NE MDocument21 pagesLLLLLL,, TP: 9lROE NE MLarvalNo ratings yet
- Condition Of Maximum Torque In Three Phase Induction Motor | Electrical engineering interview questionsDocument10 pagesCondition Of Maximum Torque In Three Phase Induction Motor | Electrical engineering interview questionsshumbablessing4No ratings yet
- Analog Dialogue, Volume 48, Number 1: Analog Dialogue, #13From EverandAnalog Dialogue, Volume 48, Number 1: Analog Dialogue, #13Rating: 4 out of 5 stars4/5 (1)
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Exercises in Electronics: Operational Amplifier CircuitsFrom EverandExercises in Electronics: Operational Amplifier CircuitsRating: 3 out of 5 stars3/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Physics Semiconductor Device MCQDocument3 pagesPhysics Semiconductor Device MCQAsim Ali0% (1)
- 42C&D FCU Series CatalogueDocument55 pages42C&D FCU Series CatalogueMudassar NoreNo ratings yet
- Jr. Engineer Power Electrical WAPDA 2018Document50 pagesJr. Engineer Power Electrical WAPDA 2018Hamza IzharNo ratings yet
- Pi Pingshan II InternetDocument4 pagesPi Pingshan II Internetnguyenhuutan91No ratings yet
- 3214JN EngDocument4 pages3214JN EngAdemar FukeNo ratings yet
- AL-Revision Chap 5,6Document10 pagesAL-Revision Chap 5,6Omar A-gNo ratings yet
- Distance and DisplacementDocument37 pagesDistance and DisplacementHany ElGezawyNo ratings yet
- 1 (1) 4Document10 pages1 (1) 4Angga SeptianNo ratings yet
- 16mb1a0 InstalacionDocument2 pages16mb1a0 InstalacionAntonio MurrietaNo ratings yet
- Datasheet 6ES7972 0CB20 0XA0.Document2 pagesDatasheet 6ES7972 0CB20 0XA0.DraKo BaracunataNo ratings yet
- Oiml R43 (1981)Document15 pagesOiml R43 (1981)BellbrujaNo ratings yet
- Types of Motion or Deformation of Fluid ElementsDocument11 pagesTypes of Motion or Deformation of Fluid ElementsAboo Sdam AL MkahalNo ratings yet
- Part1 - NEET UG Physics Ocsillations and Waves MCQs PDFDocument24 pagesPart1 - NEET UG Physics Ocsillations and Waves MCQs PDFTrilok AkhaniNo ratings yet
- Ch.04 Chuẩn 1Document57 pagesCh.04 Chuẩn 1pham tamNo ratings yet
- Chap4 000Document5 pagesChap4 000pja752No ratings yet
- LT1008 1529879Document17 pagesLT1008 1529879Arief Khairi IrawanNo ratings yet
- SolarPoster2017 Rev1Document1 pageSolarPoster2017 Rev1Ever HuertaNo ratings yet
- Experiment 10 (B) Inverse Square LawDocument3 pagesExperiment 10 (B) Inverse Square LawAnshul SrivastavaNo ratings yet
- APL 100: Minor 2Document3 pagesAPL 100: Minor 2kamleshNo ratings yet
- CB 6 Poi NF 27 - RosDocument1 pageCB 6 Poi NF 27 - RoslucvtNo ratings yet
- BEV10403 - Week 2 - InductorDocument38 pagesBEV10403 - Week 2 - InductorShafiq NasriNo ratings yet
- Waukesha VHP L5794gsi Product SheetDocument2 pagesWaukesha VHP L5794gsi Product SheetUmair A. KhanNo ratings yet
- Honeywell AWM3300V DatasheetDocument3 pagesHoneywell AWM3300V DatasheetSam SamiNo ratings yet
- Wetted Wall ColumnDocument8 pagesWetted Wall ColumnSameer NasirNo ratings yet
- Tutorial 3 Tutorial 3Document5 pagesTutorial 3 Tutorial 3Akashi SeijuroNo ratings yet
- Centre of Gravity and StabilityDocument16 pagesCentre of Gravity and StabilityTonikay MillerNo ratings yet
- VT022Document14 pagesVT022Toni RenedoNo ratings yet