
Susheela 2016
Susheela 2016
You might also like
- Columns DesignDocument29 pagesColumns Designهيمة عليNo ratings yet
- Fundamentals of Soil and Water Conservation EngineeringDocument142 pagesFundamentals of Soil and Water Conservation EngineeringGary Bhullar95% (38)
- New-Phys 1011 Module FinalDocument377 pagesNew-Phys 1011 Module FinalNahom Amare100% (1)
- Chapter Test B: Teacher Notes and Answers Electric Forces and FieldsDocument7 pagesChapter Test B: Teacher Notes and Answers Electric Forces and Fieldsmahsan abbasNo ratings yet
- Chapter 13 - Student Solutions Manual Applied Statistics and Probability ForDocument22 pagesChapter 13 - Student Solutions Manual Applied Statistics and Probability ForKingba Olayemi50% (2)
- IEEE PEDS 5LEVEL ShinyDocument6 pagesIEEE PEDS 5LEVEL Shinymahmoud yarahmadiNo ratings yet
- IET - KCJ - Performance Evaluation of A General SVPWMDocument9 pagesIET - KCJ - Performance Evaluation of A General SVPWMKartick JanaNo ratings yet
- A General Space Vector PWM Algorithm For Multilevel Inverters, Including Operation in OvermodulationDocument10 pagesA General Space Vector PWM Algorithm For Multilevel Inverters, Including Operation in OvermodulationxuanthamdhqnNo ratings yet
- Mali 2019Document7 pagesMali 2019aymenNo ratings yet
- Durgasukumar 2011Document6 pagesDurgasukumar 2011aditya317crazyNo ratings yet
- A Simple Space Vector PWM Generation Scheme For Any General N-Level InverterDocument9 pagesA Simple Space Vector PWM Generation Scheme For Any General N-Level InverterAhmad MqdadNo ratings yet
- International Journal of Computational Engineering Research (IJCER)Document7 pagesInternational Journal of Computational Engineering Research (IJCER)International Journal of computational Engineering research (IJCER)No ratings yet
- Comparative Study of MLI and Dual Inverter Using Space Vector Modulation TechniquesDocument8 pagesComparative Study of MLI and Dual Inverter Using Space Vector Modulation Techniquesshiva256No ratings yet
- Seven Level Inverter With Nearest Level ControlDocument7 pagesSeven Level Inverter With Nearest Level Controlsanjay sNo ratings yet
- Yacine 2017Document6 pagesYacine 2017hao.nguyenismeNo ratings yet
- 06125602Document6 pages06125602Ahmad Sadam SyaeroziNo ratings yet
- Simulation of A Space Vector PWM Controller For A Five-Level Voltage-Fed Inverter Motor DriveDocument7 pagesSimulation of A Space Vector PWM Controller For A Five-Level Voltage-Fed Inverter Motor DriveIOSRjournalNo ratings yet
- Analysis of Total Harmonic DistortionDocument5 pagesAnalysis of Total Harmonic DistortionME SOUNDNo ratings yet
- Karampuri 2016Document6 pagesKarampuri 2016Kill MongerNo ratings yet
- A Study of Comparative Analysis of Different PWMDocument6 pagesA Study of Comparative Analysis of Different PWMwilliam chaconNo ratings yet
- Switching Pattern Selection Scheme Based Cascaded Multilevel Inverter Fed Induction Motor DriveDocument6 pagesSwitching Pattern Selection Scheme Based Cascaded Multilevel Inverter Fed Induction Motor Drivevinay kumarNo ratings yet
- A Hybrid Multilevel Inverter System Based On Dodecagonal Space Vectors For Medium Voltage IM DrivesDocument10 pagesA Hybrid Multilevel Inverter System Based On Dodecagonal Space Vectors For Medium Voltage IM DrivesraghuaadsNo ratings yet
- Comparison Between Phase-And Level-Shifted PWM Schemes For Flying Capacitor Multilevel InverterDocument4 pagesComparison Between Phase-And Level-Shifted PWM Schemes For Flying Capacitor Multilevel InverterFajrian H. AnugerahNo ratings yet
- Comparative Study of Five Level and SeveDocument12 pagesComparative Study of Five Level and Sevemahmoud yarahmadiNo ratings yet
- 17 120920231241 Phpapp02 PDFDocument9 pages17 120920231241 Phpapp02 PDFPhani PhaniNo ratings yet
- Multistring Five-Level Inverter With Novel PWMDocument13 pagesMultistring Five-Level Inverter With Novel PWMsandeepbabu28No ratings yet
- Low Cost Digital Signal Generation For Driving Space Vector PWM InverterDocument12 pagesLow Cost Digital Signal Generation For Driving Space Vector PWM InverterJunaid AhmadNo ratings yet
- Anzari 2014Document6 pagesAnzari 2014Anshika MishraNo ratings yet
- Three Level InverterDocument5 pagesThree Level InverterManish PrajapatiNo ratings yet
- Implementation of A Fuzzy PI Controller For Speed Control of Induction Motors Using FPGADocument7 pagesImplementation of A Fuzzy PI Controller For Speed Control of Induction Motors Using FPGABharati RajaNo ratings yet
- Novel SVPWM Strategy Considering DC-link Balancing For A Multi-Level Voltage Source InverterDocument6 pagesNovel SVPWM Strategy Considering DC-link Balancing For A Multi-Level Voltage Source InvertermücahitNo ratings yet
- Ijeet: International Journal of Electrical Engineering & Technology (Ijeet)Document15 pagesIjeet: International Journal of Electrical Engineering & Technology (Ijeet)Koukou AmkoukouNo ratings yet
- Simulation of Single Phase Multilevel Inverters With Simple Control Strategy Using MATLABDocument9 pagesSimulation of Single Phase Multilevel Inverters With Simple Control Strategy Using MATLABFarman UllahNo ratings yet
- Design and Implementation of Space Vector PWM Inverter Based On A Low Cost MicrocontrollerDocument12 pagesDesign and Implementation of Space Vector PWM Inverter Based On A Low Cost MicrocontrollerHaider NeamaNo ratings yet
- Decoupled Space-Vector PWM Strategies For A Four-Level Asymmetrical Open-End Winding Induction Motor Drive With Waveform SymmetriesDocument12 pagesDecoupled Space-Vector PWM Strategies For A Four-Level Asymmetrical Open-End Winding Induction Motor Drive With Waveform SymmetriesGanesh ChallaNo ratings yet
- Multilevel Inverters A Survey of Topologies Control and ApplicationsDocument15 pagesMultilevel Inverters A Survey of Topologies Control and Applicationstochi8267No ratings yet
- Novel Asymmetrical Multilevel Inverter Topology With Reduced Number of Switches For Photovoltaic ApplicationsDocument6 pagesNovel Asymmetrical Multilevel Inverter Topology With Reduced Number of Switches For Photovoltaic ApplicationsKRISHNA PRASADNo ratings yet
- Clase 04Document9 pagesClase 04Mauricio LeañoNo ratings yet
- CHB InverterDocument6 pagesCHB InverterSateesh KumarNo ratings yet
- A Multilevel Converter With A Floating Bridge For Open-End Winding Motor Drive ApplicationsDocument10 pagesA Multilevel Converter With A Floating Bridge For Open-End Winding Motor Drive ApplicationsAbd DawaraNo ratings yet
- A Comparative Study of Various Multi-Level Inverter Based On Multi-CellDocument4 pagesA Comparative Study of Various Multi-Level Inverter Based On Multi-CellTarak BenslimaneNo ratings yet
- A SVM Based Four-Level Open-End Winding-Induction Motor Drive With Voltage Balancing of DC-link Capacitors Using SVM Based HCC Front-End ConverterDocument5 pagesA SVM Based Four-Level Open-End Winding-Induction Motor Drive With Voltage Balancing of DC-link Capacitors Using SVM Based HCC Front-End ConverterGanesh ChallaNo ratings yet
- A Fractal Approach To Generate Space Vector PWM For Multilevel InvertersDocument6 pagesA Fractal Approach To Generate Space Vector PWM For Multilevel InvertersTekalign TesfayeNo ratings yet
- Solar Smart Inverter - A Novel Design Using Multi Level Topology and PulseWidth Modulation With Load Detection PDFDocument5 pagesSolar Smart Inverter - A Novel Design Using Multi Level Topology and PulseWidth Modulation With Load Detection PDFmuhammad mamoonNo ratings yet
- Boost Converter Based MLI Topology Using H-Bridge For Device Control Application With Reduced Device CountDocument5 pagesBoost Converter Based MLI Topology Using H-Bridge For Device Control Application With Reduced Device CountKavin PrasathNo ratings yet
- Modelling of 9 Level Inverter To Reduce Total Harmonic DistortionDocument4 pagesModelling of 9 Level Inverter To Reduce Total Harmonic DistortionRavinder RangaNo ratings yet
- Space Vector Pulse Width Modulation Based Two Level InverterDocument6 pagesSpace Vector Pulse Width Modulation Based Two Level InverterSyed Muhammad Sharif NaqviNo ratings yet
- An Analysis and Survey of Multilevel Inverters Topologies, Controls, and ApplicationsDocument10 pagesAn Analysis and Survey of Multilevel Inverters Topologies, Controls, and ApplicationsDr-Ismayil CNo ratings yet
- Performance Analysis of Multi-Level Inverter For Dynamic Voltage RestorerDocument6 pagesPerformance Analysis of Multi-Level Inverter For Dynamic Voltage Restorersup9No ratings yet
- A Capacitor Voltage Balancing Method For Nested Neutral Point Clamped (NNPC) InverterDocument9 pagesA Capacitor Voltage Balancing Method For Nested Neutral Point Clamped (NNPC) InverterSaravanan MaleNo ratings yet
- Celano Vic 2001Document5 pagesCelano Vic 2001MV Research & Development TRSNo ratings yet
- Optimum Space Vector PWM Algorithm For Three-Level Inverter: B. Urmila and D. Subba RayuduDocument13 pagesOptimum Space Vector PWM Algorithm For Three-Level Inverter: B. Urmila and D. Subba RayudusureshonuNo ratings yet
- New Multilevel Inverter Topology With Reduced Number of SwitchesDocument6 pagesNew Multilevel Inverter Topology With Reduced Number of SwitchesVikram PrasadNo ratings yet
- Three-Level Inverter Performance Using Adaptive Neuro-Fuzzy Based Space Vector ModulationDocument14 pagesThree-Level Inverter Performance Using Adaptive Neuro-Fuzzy Based Space Vector ModulationiisteNo ratings yet
- 9-An Optimized Discontinuous PWM Method To Minimize Switching Loss For Multilevel InvertersDocument9 pages9-An Optimized Discontinuous PWM Method To Minimize Switching Loss For Multilevel InvertersMunsif AliNo ratings yet
- Introducing The Low Switching Frequency Space Vector Modulated Multi-Modular Three-Level Converters For High Power Applications Switching StrategiesDocument6 pagesIntroducing The Low Switching Frequency Space Vector Modulated Multi-Modular Three-Level Converters For High Power Applications Switching StrategiesmaheshwareshwarNo ratings yet
- Harmonic and Loss Analysis of Space-Vector Modulated ConvertersDocument6 pagesHarmonic and Loss Analysis of Space-Vector Modulated Convertersahmet ozturkNo ratings yet
- Analog Dialogue, Volume 48, Number 1: Analog Dialogue, #13From EverandAnalog Dialogue, Volume 48, Number 1: Analog Dialogue, #13Rating: 4 out of 5 stars4/5 (1)
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- STEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10From EverandSTEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Advanced Multilevel Converters and Applications in Grid IntegrationFrom EverandAdvanced Multilevel Converters and Applications in Grid IntegrationAli Iftekhar MaswoodNo ratings yet
- 2021 ProbDocument3 pages2021 ProbKanika ManochaNo ratings yet
- (MAA 1.9) MATHEMATICAL INDUCTION - EcoDocument6 pages(MAA 1.9) MATHEMATICAL INDUCTION - EcoAarishiNo ratings yet
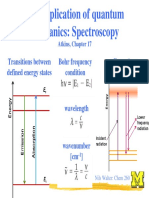
- The Application of Quantum Mechanics: SpectrosDocument7 pagesThe Application of Quantum Mechanics: SpectrosRa saNo ratings yet
- Re: (Panduan) Setting Carb V13: Posts: 903 WakakakaaaaDocument9 pagesRe: (Panduan) Setting Carb V13: Posts: 903 WakakakaaaaHil MellNo ratings yet
- Managed Pressure Drilling Modeling & Simulation (A Case Study)Document8 pagesManaged Pressure Drilling Modeling & Simulation (A Case Study)Mejbahul SarkerNo ratings yet
- Science 6 Module 6 (Moodle)Document7 pagesScience 6 Module 6 (Moodle)Heal RamirezNo ratings yet
- Lessonplan 4 A'sDocument3 pagesLessonplan 4 A'sEJ LogmaoNo ratings yet
- ApusDocument1 pageApusHartford CourantNo ratings yet
- GB Assessment Test (Gbat) : #Covid-19. Stay Safe, Stay EducatedDocument9 pagesGB Assessment Test (Gbat) : #Covid-19. Stay Safe, Stay EducatedJASON100% (1)
- Conversion FactorsDocument12 pagesConversion FactorsJack Sparrow100% (1)
- System Identification and Robust Position Control For Electro Hydraulic Servo System Using Hybrid Model Predictive ControlDocument15 pagesSystem Identification and Robust Position Control For Electro Hydraulic Servo System Using Hybrid Model Predictive ControlJose Luis SarmientoNo ratings yet
- Cambridge Science Y7 Workbook + Worksheet Unit 9-10-11 TeacherDocument80 pagesCambridge Science Y7 Workbook + Worksheet Unit 9-10-11 TeacherpettagscoNo ratings yet
- Desing and Development of Teff Seed BroadcasterDocument86 pagesDesing and Development of Teff Seed Broadcastermesfin Demise100% (1)
- Physics Class Xii Sample Paper 04 For 2019 20 1Document7 pagesPhysics Class Xii Sample Paper 04 For 2019 20 1jay danenjeyanNo ratings yet
- Generator Governor Frequency Response - Rich BauerDocument22 pagesGenerator Governor Frequency Response - Rich BauerSreekanthMylavarapu100% (1)
- MathematecianDocument14 pagesMathematecianyashomthakurNo ratings yet
- Phys2 - Preliminary ExamDocument3 pagesPhys2 - Preliminary ExamOliver VillanuevaNo ratings yet
- ASTM Materials Composition: EmailDocument1 pageASTM Materials Composition: EmailLakshmi NarayananNo ratings yet
- BW HYDRO BH-series: ISO-L-HM Type of ANTI-WEAR Hydraulic FluidDocument1 pageBW HYDRO BH-series: ISO-L-HM Type of ANTI-WEAR Hydraulic FluidSAEFUDDIN SAEFUDDINNo ratings yet
- Leonhard Euler (1707-1783)Document3 pagesLeonhard Euler (1707-1783)Sreelakshmi KsNo ratings yet
- Drvo BetonDocument131 pagesDrvo BetonSonja DragovicNo ratings yet
- English For Students of Science PDFDocument89 pagesEnglish For Students of Science PDFsayed shahabuddin Adeeb100% (1)
- Comprehensive Approach. Pp. 41-45 Philippines: A WSS Senior High School SeriesDocument3 pagesComprehensive Approach. Pp. 41-45 Philippines: A WSS Senior High School SeriesTJ gatmaitanNo ratings yet
- 6 SPH3U PHET FBD and Newton's Laws With Friction Virtual LabDocument5 pages6 SPH3U PHET FBD and Newton's Laws With Friction Virtual Lablim05abcNo ratings yet
- RMS and Average Value of ACDocument14 pagesRMS and Average Value of ACspidy warriorsNo ratings yet
























































































Download as pdf or txt
You might also like
- Columns DesignDocument29 pagesColumns Designهيمة عليNo ratings yet
- Fundamentals of Soil and Water Conservation EngineeringDocument142 pagesFundamentals of Soil and Water Conservation EngineeringGary Bhullar95% (38)
- New-Phys 1011 Module FinalDocument377 pagesNew-Phys 1011 Module FinalNahom Amare100% (1)
- Chapter Test B: Teacher Notes and Answers Electric Forces and FieldsDocument7 pagesChapter Test B: Teacher Notes and Answers Electric Forces and Fieldsmahsan abbasNo ratings yet
- Chapter 13 - Student Solutions Manual Applied Statistics and Probability ForDocument22 pagesChapter 13 - Student Solutions Manual Applied Statistics and Probability ForKingba Olayemi50% (2)
- IEEE PEDS 5LEVEL ShinyDocument6 pagesIEEE PEDS 5LEVEL Shinymahmoud yarahmadiNo ratings yet
- IET - KCJ - Performance Evaluation of A General SVPWMDocument9 pagesIET - KCJ - Performance Evaluation of A General SVPWMKartick JanaNo ratings yet
- A General Space Vector PWM Algorithm For Multilevel Inverters, Including Operation in OvermodulationDocument10 pagesA General Space Vector PWM Algorithm For Multilevel Inverters, Including Operation in OvermodulationxuanthamdhqnNo ratings yet
- Mali 2019Document7 pagesMali 2019aymenNo ratings yet
- Durgasukumar 2011Document6 pagesDurgasukumar 2011aditya317crazyNo ratings yet
- A Simple Space Vector PWM Generation Scheme For Any General N-Level InverterDocument9 pagesA Simple Space Vector PWM Generation Scheme For Any General N-Level InverterAhmad MqdadNo ratings yet
- International Journal of Computational Engineering Research (IJCER)Document7 pagesInternational Journal of Computational Engineering Research (IJCER)International Journal of computational Engineering research (IJCER)No ratings yet
- Comparative Study of MLI and Dual Inverter Using Space Vector Modulation TechniquesDocument8 pagesComparative Study of MLI and Dual Inverter Using Space Vector Modulation Techniquesshiva256No ratings yet
- Seven Level Inverter With Nearest Level ControlDocument7 pagesSeven Level Inverter With Nearest Level Controlsanjay sNo ratings yet
- Yacine 2017Document6 pagesYacine 2017hao.nguyenismeNo ratings yet
- 06125602Document6 pages06125602Ahmad Sadam SyaeroziNo ratings yet
- Simulation of A Space Vector PWM Controller For A Five-Level Voltage-Fed Inverter Motor DriveDocument7 pagesSimulation of A Space Vector PWM Controller For A Five-Level Voltage-Fed Inverter Motor DriveIOSRjournalNo ratings yet
- Analysis of Total Harmonic DistortionDocument5 pagesAnalysis of Total Harmonic DistortionME SOUNDNo ratings yet
- Karampuri 2016Document6 pagesKarampuri 2016Kill MongerNo ratings yet
- A Study of Comparative Analysis of Different PWMDocument6 pagesA Study of Comparative Analysis of Different PWMwilliam chaconNo ratings yet
- Switching Pattern Selection Scheme Based Cascaded Multilevel Inverter Fed Induction Motor DriveDocument6 pagesSwitching Pattern Selection Scheme Based Cascaded Multilevel Inverter Fed Induction Motor Drivevinay kumarNo ratings yet
- A Hybrid Multilevel Inverter System Based On Dodecagonal Space Vectors For Medium Voltage IM DrivesDocument10 pagesA Hybrid Multilevel Inverter System Based On Dodecagonal Space Vectors For Medium Voltage IM DrivesraghuaadsNo ratings yet
- Comparison Between Phase-And Level-Shifted PWM Schemes For Flying Capacitor Multilevel InverterDocument4 pagesComparison Between Phase-And Level-Shifted PWM Schemes For Flying Capacitor Multilevel InverterFajrian H. AnugerahNo ratings yet
- Comparative Study of Five Level and SeveDocument12 pagesComparative Study of Five Level and Sevemahmoud yarahmadiNo ratings yet
- 17 120920231241 Phpapp02 PDFDocument9 pages17 120920231241 Phpapp02 PDFPhani PhaniNo ratings yet
- Multistring Five-Level Inverter With Novel PWMDocument13 pagesMultistring Five-Level Inverter With Novel PWMsandeepbabu28No ratings yet
- Low Cost Digital Signal Generation For Driving Space Vector PWM InverterDocument12 pagesLow Cost Digital Signal Generation For Driving Space Vector PWM InverterJunaid AhmadNo ratings yet
- Anzari 2014Document6 pagesAnzari 2014Anshika MishraNo ratings yet
- Three Level InverterDocument5 pagesThree Level InverterManish PrajapatiNo ratings yet
- Implementation of A Fuzzy PI Controller For Speed Control of Induction Motors Using FPGADocument7 pagesImplementation of A Fuzzy PI Controller For Speed Control of Induction Motors Using FPGABharati RajaNo ratings yet
- Novel SVPWM Strategy Considering DC-link Balancing For A Multi-Level Voltage Source InverterDocument6 pagesNovel SVPWM Strategy Considering DC-link Balancing For A Multi-Level Voltage Source InvertermücahitNo ratings yet
- Ijeet: International Journal of Electrical Engineering & Technology (Ijeet)Document15 pagesIjeet: International Journal of Electrical Engineering & Technology (Ijeet)Koukou AmkoukouNo ratings yet
- Simulation of Single Phase Multilevel Inverters With Simple Control Strategy Using MATLABDocument9 pagesSimulation of Single Phase Multilevel Inverters With Simple Control Strategy Using MATLABFarman UllahNo ratings yet
- Design and Implementation of Space Vector PWM Inverter Based On A Low Cost MicrocontrollerDocument12 pagesDesign and Implementation of Space Vector PWM Inverter Based On A Low Cost MicrocontrollerHaider NeamaNo ratings yet
- Decoupled Space-Vector PWM Strategies For A Four-Level Asymmetrical Open-End Winding Induction Motor Drive With Waveform SymmetriesDocument12 pagesDecoupled Space-Vector PWM Strategies For A Four-Level Asymmetrical Open-End Winding Induction Motor Drive With Waveform SymmetriesGanesh ChallaNo ratings yet
- Multilevel Inverters A Survey of Topologies Control and ApplicationsDocument15 pagesMultilevel Inverters A Survey of Topologies Control and Applicationstochi8267No ratings yet
- Novel Asymmetrical Multilevel Inverter Topology With Reduced Number of Switches For Photovoltaic ApplicationsDocument6 pagesNovel Asymmetrical Multilevel Inverter Topology With Reduced Number of Switches For Photovoltaic ApplicationsKRISHNA PRASADNo ratings yet
- Clase 04Document9 pagesClase 04Mauricio LeañoNo ratings yet
- CHB InverterDocument6 pagesCHB InverterSateesh KumarNo ratings yet
- A Multilevel Converter With A Floating Bridge For Open-End Winding Motor Drive ApplicationsDocument10 pagesA Multilevel Converter With A Floating Bridge For Open-End Winding Motor Drive ApplicationsAbd DawaraNo ratings yet
- A Comparative Study of Various Multi-Level Inverter Based On Multi-CellDocument4 pagesA Comparative Study of Various Multi-Level Inverter Based On Multi-CellTarak BenslimaneNo ratings yet
- A SVM Based Four-Level Open-End Winding-Induction Motor Drive With Voltage Balancing of DC-link Capacitors Using SVM Based HCC Front-End ConverterDocument5 pagesA SVM Based Four-Level Open-End Winding-Induction Motor Drive With Voltage Balancing of DC-link Capacitors Using SVM Based HCC Front-End ConverterGanesh ChallaNo ratings yet
- A Fractal Approach To Generate Space Vector PWM For Multilevel InvertersDocument6 pagesA Fractal Approach To Generate Space Vector PWM For Multilevel InvertersTekalign TesfayeNo ratings yet
- Solar Smart Inverter - A Novel Design Using Multi Level Topology and PulseWidth Modulation With Load Detection PDFDocument5 pagesSolar Smart Inverter - A Novel Design Using Multi Level Topology and PulseWidth Modulation With Load Detection PDFmuhammad mamoonNo ratings yet
- Boost Converter Based MLI Topology Using H-Bridge For Device Control Application With Reduced Device CountDocument5 pagesBoost Converter Based MLI Topology Using H-Bridge For Device Control Application With Reduced Device CountKavin PrasathNo ratings yet
- Modelling of 9 Level Inverter To Reduce Total Harmonic DistortionDocument4 pagesModelling of 9 Level Inverter To Reduce Total Harmonic DistortionRavinder RangaNo ratings yet
- Space Vector Pulse Width Modulation Based Two Level InverterDocument6 pagesSpace Vector Pulse Width Modulation Based Two Level InverterSyed Muhammad Sharif NaqviNo ratings yet
- An Analysis and Survey of Multilevel Inverters Topologies, Controls, and ApplicationsDocument10 pagesAn Analysis and Survey of Multilevel Inverters Topologies, Controls, and ApplicationsDr-Ismayil CNo ratings yet
- Performance Analysis of Multi-Level Inverter For Dynamic Voltage RestorerDocument6 pagesPerformance Analysis of Multi-Level Inverter For Dynamic Voltage Restorersup9No ratings yet
- A Capacitor Voltage Balancing Method For Nested Neutral Point Clamped (NNPC) InverterDocument9 pagesA Capacitor Voltage Balancing Method For Nested Neutral Point Clamped (NNPC) InverterSaravanan MaleNo ratings yet
- Celano Vic 2001Document5 pagesCelano Vic 2001MV Research & Development TRSNo ratings yet
- Optimum Space Vector PWM Algorithm For Three-Level Inverter: B. Urmila and D. Subba RayuduDocument13 pagesOptimum Space Vector PWM Algorithm For Three-Level Inverter: B. Urmila and D. Subba RayudusureshonuNo ratings yet
- New Multilevel Inverter Topology With Reduced Number of SwitchesDocument6 pagesNew Multilevel Inverter Topology With Reduced Number of SwitchesVikram PrasadNo ratings yet
- Three-Level Inverter Performance Using Adaptive Neuro-Fuzzy Based Space Vector ModulationDocument14 pagesThree-Level Inverter Performance Using Adaptive Neuro-Fuzzy Based Space Vector ModulationiisteNo ratings yet
- 9-An Optimized Discontinuous PWM Method To Minimize Switching Loss For Multilevel InvertersDocument9 pages9-An Optimized Discontinuous PWM Method To Minimize Switching Loss For Multilevel InvertersMunsif AliNo ratings yet
- Introducing The Low Switching Frequency Space Vector Modulated Multi-Modular Three-Level Converters For High Power Applications Switching StrategiesDocument6 pagesIntroducing The Low Switching Frequency Space Vector Modulated Multi-Modular Three-Level Converters For High Power Applications Switching StrategiesmaheshwareshwarNo ratings yet
- Harmonic and Loss Analysis of Space-Vector Modulated ConvertersDocument6 pagesHarmonic and Loss Analysis of Space-Vector Modulated Convertersahmet ozturkNo ratings yet
- Analog Dialogue, Volume 48, Number 1: Analog Dialogue, #13From EverandAnalog Dialogue, Volume 48, Number 1: Analog Dialogue, #13Rating: 4 out of 5 stars4/5 (1)
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- STEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10From EverandSTEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Advanced Multilevel Converters and Applications in Grid IntegrationFrom EverandAdvanced Multilevel Converters and Applications in Grid IntegrationAli Iftekhar MaswoodNo ratings yet
- 2021 ProbDocument3 pages2021 ProbKanika ManochaNo ratings yet
- (MAA 1.9) MATHEMATICAL INDUCTION - EcoDocument6 pages(MAA 1.9) MATHEMATICAL INDUCTION - EcoAarishiNo ratings yet
- The Application of Quantum Mechanics: SpectrosDocument7 pagesThe Application of Quantum Mechanics: SpectrosRa saNo ratings yet
- Re: (Panduan) Setting Carb V13: Posts: 903 WakakakaaaaDocument9 pagesRe: (Panduan) Setting Carb V13: Posts: 903 WakakakaaaaHil MellNo ratings yet
- Managed Pressure Drilling Modeling & Simulation (A Case Study)Document8 pagesManaged Pressure Drilling Modeling & Simulation (A Case Study)Mejbahul SarkerNo ratings yet
- Science 6 Module 6 (Moodle)Document7 pagesScience 6 Module 6 (Moodle)Heal RamirezNo ratings yet
- Lessonplan 4 A'sDocument3 pagesLessonplan 4 A'sEJ LogmaoNo ratings yet
- ApusDocument1 pageApusHartford CourantNo ratings yet
- GB Assessment Test (Gbat) : #Covid-19. Stay Safe, Stay EducatedDocument9 pagesGB Assessment Test (Gbat) : #Covid-19. Stay Safe, Stay EducatedJASON100% (1)
- Conversion FactorsDocument12 pagesConversion FactorsJack Sparrow100% (1)
- System Identification and Robust Position Control For Electro Hydraulic Servo System Using Hybrid Model Predictive ControlDocument15 pagesSystem Identification and Robust Position Control For Electro Hydraulic Servo System Using Hybrid Model Predictive ControlJose Luis SarmientoNo ratings yet
- Cambridge Science Y7 Workbook + Worksheet Unit 9-10-11 TeacherDocument80 pagesCambridge Science Y7 Workbook + Worksheet Unit 9-10-11 TeacherpettagscoNo ratings yet
- Desing and Development of Teff Seed BroadcasterDocument86 pagesDesing and Development of Teff Seed Broadcastermesfin Demise100% (1)
- Physics Class Xii Sample Paper 04 For 2019 20 1Document7 pagesPhysics Class Xii Sample Paper 04 For 2019 20 1jay danenjeyanNo ratings yet
- Generator Governor Frequency Response - Rich BauerDocument22 pagesGenerator Governor Frequency Response - Rich BauerSreekanthMylavarapu100% (1)
- MathematecianDocument14 pagesMathematecianyashomthakurNo ratings yet
- Phys2 - Preliminary ExamDocument3 pagesPhys2 - Preliminary ExamOliver VillanuevaNo ratings yet
- ASTM Materials Composition: EmailDocument1 pageASTM Materials Composition: EmailLakshmi NarayananNo ratings yet
- BW HYDRO BH-series: ISO-L-HM Type of ANTI-WEAR Hydraulic FluidDocument1 pageBW HYDRO BH-series: ISO-L-HM Type of ANTI-WEAR Hydraulic FluidSAEFUDDIN SAEFUDDINNo ratings yet
- Leonhard Euler (1707-1783)Document3 pagesLeonhard Euler (1707-1783)Sreelakshmi KsNo ratings yet
- Drvo BetonDocument131 pagesDrvo BetonSonja DragovicNo ratings yet
- English For Students of Science PDFDocument89 pagesEnglish For Students of Science PDFsayed shahabuddin Adeeb100% (1)
- Comprehensive Approach. Pp. 41-45 Philippines: A WSS Senior High School SeriesDocument3 pagesComprehensive Approach. Pp. 41-45 Philippines: A WSS Senior High School SeriesTJ gatmaitanNo ratings yet
- 6 SPH3U PHET FBD and Newton's Laws With Friction Virtual LabDocument5 pages6 SPH3U PHET FBD and Newton's Laws With Friction Virtual Lablim05abcNo ratings yet
- RMS and Average Value of ACDocument14 pagesRMS and Average Value of ACspidy warriorsNo ratings yet