Download as pdf or txt
You might also like
- Switching Power Supply Design: A Concise Practical HandbookFrom EverandSwitching Power Supply Design: A Concise Practical HandbookNo ratings yet
- AC Vector Drives 1 RevisionDocument26 pagesAC Vector Drives 1 Revisionleo232No ratings yet
- Faculty of Commerce Bachelor of CommerceDocument28 pagesFaculty of Commerce Bachelor of CommercemawandeNo ratings yet
- Speed Control of 3phase Induction MotorDocument3 pagesSpeed Control of 3phase Induction MotorSiddhant ShatàpathyNo ratings yet
- Induction Motor Drive PDFDocument8 pagesInduction Motor Drive PDFSwostik RoutNo ratings yet
- 4.static Kramer Drive, Variable Frequency Variable VoltageDocument8 pages4.static Kramer Drive, Variable Frequency Variable VoltageJanani RangarajanNo ratings yet
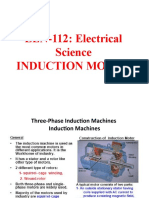
- Induction MotorDocument28 pagesInduction Motorsumithra100% (2)
- UNIT 1-Lecture 1 Introduction of Electrical Drives and ControlDocument19 pagesUNIT 1-Lecture 1 Introduction of Electrical Drives and Controlanandlm710No ratings yet
- Induction Motors Lecture SlideDocument17 pagesInduction Motors Lecture SlidealvinNo ratings yet
- Final Report DFIMDocument13 pagesFinal Report DFIMmounaNo ratings yet
- Induction MotorDocument39 pagesInduction MotorAhmed MagdyNo ratings yet
- Kramer DriveDocument42 pagesKramer DriveSenthil Kumar100% (1)
- EV Class NotesDocument30 pagesEV Class NotesVinod BabaleshwarNo ratings yet
- Induction GeneratorDocument61 pagesInduction Generatorayash mohantyNo ratings yet
- 7-DC MachinesDocument3 pages7-DC Machinesmkmohkh4No ratings yet
- Topic 9 Control of DC MachinesDocument41 pagesTopic 9 Control of DC Machinescemefi7580No ratings yet
- Ied Unit VDocument8 pagesIed Unit VRudra Kumar MishraNo ratings yet
- Induction MotorDocument39 pagesInduction MotorSaneer M SaliNo ratings yet
- Unit 4 - Three-Phase Induction MotorsDocument93 pagesUnit 4 - Three-Phase Induction MotorsMaribe TshegoNo ratings yet
- Lecture 3Document38 pagesLecture 3AbdulNo ratings yet
- Ac DrivesDocument36 pagesAc DrivesSeshagirirao GalamNo ratings yet
- Slip Power Recovery SchemesDocument24 pagesSlip Power Recovery SchemesMagudeeswaran MagudeeswaranNo ratings yet
- Unit - 1 - Sem 21-22-1Document23 pagesUnit - 1 - Sem 21-22-13dgamingworld36No ratings yet
- AC Machines ControlDocument27 pagesAC Machines ControlMohamed HadadjNo ratings yet
- Induction Machines: Principle of Operation and Equivalent Circuit ModelDocument15 pagesInduction Machines: Principle of Operation and Equivalent Circuit ModelRyan BenjaminNo ratings yet
- ELEC 2032 (3) Electromechanical System: Induction Motor IIIDocument19 pagesELEC 2032 (3) Electromechanical System: Induction Motor IIIAshvin AshNo ratings yet
- 7 - Lecture - Induction MotorsDocument41 pages7 - Lecture - Induction MotorspaurushgodharNo ratings yet
- Induction Motor Modeling - Steady StateDocument43 pagesInduction Motor Modeling - Steady Statedivinelight100% (3)
- A Review of Torque Ripple Control Strategies of Switched Reluctance MotorDocument5 pagesA Review of Torque Ripple Control Strategies of Switched Reluctance Motorsuntchou julesNo ratings yet
- Solid State Drives Short BookDocument25 pagesSolid State Drives Short BookGomathi Raja MNo ratings yet
- Acdc - Induction Motor - Lecture Notes 8Document39 pagesAcdc - Induction Motor - Lecture Notes 8Cllyan ReyesNo ratings yet
- 电磁电机-4 直流有刷电机与驱动1.2Document30 pages电磁电机-4 直流有刷电机与驱动1.2Jiyuan JiaNo ratings yet
- Lecture - 2 - Torque-Speed Characteristics of 3-Phase IMDocument8 pagesLecture - 2 - Torque-Speed Characteristics of 3-Phase IMDina GaranNo ratings yet
- Mech V Turbo Machines U3Document9 pagesMech V Turbo Machines U3Soham DasNo ratings yet
- Induction Machine-2020Document95 pagesInduction Machine-2020Bharat SinghNo ratings yet
- Stepper Motor: CO2: LO: Understand Construction and Operation Write The Control SequenceDocument25 pagesStepper Motor: CO2: LO: Understand Construction and Operation Write The Control SequenceAzeem .kNo ratings yet
- Electrical Machines-I IIIDocument55 pagesElectrical Machines-I IIIadityassripadaNo ratings yet
- 21EE44-Module 3Document18 pages21EE44-Module 3AshwiniNo ratings yet
- 8 3-Ph. Ind Motor Starting & Speed ControlDocument26 pages8 3-Ph. Ind Motor Starting & Speed ControlFos AlharbiNo ratings yet
- National Institute of Technology, Delhi: Department of Electrical & Electronics EngineeringDocument6 pagesNational Institute of Technology, Delhi: Department of Electrical & Electronics EngineeringKomal SinghNo ratings yet
- Electrical Machine Drives: Dr. Arsalan ArifDocument15 pagesElectrical Machine Drives: Dr. Arsalan ArifFaraz AhmadNo ratings yet
- Induction MachineDocument48 pagesInduction MachinechethanNo ratings yet
- Induction Motor DrivesDocument73 pagesInduction Motor DrivesSai Pranahita KulithalaiNo ratings yet
- Energy Conversion One: INDUCTION MOTORS (Maximum Torque )Document83 pagesEnergy Conversion One: INDUCTION MOTORS (Maximum Torque )bilalNo ratings yet
- Lect - 39 - 40 - Power Electronic Control of IM MotorsDocument18 pagesLect - 39 - 40 - Power Electronic Control of IM MotorsVishal MeghwarNo ratings yet
- Ac Servo Speed Torque Characteristics Measurement Unit - PREMIERDocument14 pagesAc Servo Speed Torque Characteristics Measurement Unit - PREMIERAAYUSH KUMARNo ratings yet
- Torque Sensors: Common Sensing MethodsDocument32 pagesTorque Sensors: Common Sensing MethodsvishiwizardNo ratings yet
- Chuong 3 - Dieu Khien Toc Do Dong Co KDBDocument55 pagesChuong 3 - Dieu Khien Toc Do Dong Co KDBThiên HảiNo ratings yet
- L2. Single Phase Ac Voltage ControllersDocument104 pagesL2. Single Phase Ac Voltage ControllersShivaram Vadla100% (2)
- Ac Motors War-MebDocument10 pagesAc Motors War-MebolingxjcNo ratings yet
- Mathematical Modelling of Electromechanical Systems PPT PSDDocument8 pagesMathematical Modelling of Electromechanical Systems PPT PSDNoviaNo ratings yet
- DC Motor Separately Excited Series and ShuntDocument44 pagesDC Motor Separately Excited Series and ShuntCristyl GuiebNo ratings yet
- 1 Introduction To Electrical Drive SystemsDocument30 pages1 Introduction To Electrical Drive Systemsngobi25eddyNo ratings yet
- Induction Motor Speed ControlDocument46 pagesInduction Motor Speed Controlsolo400060% (10)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Installing Wonderware InTouch 2014 R2 DevelopmentDocument12 pagesInstalling Wonderware InTouch 2014 R2 DevelopmentARMANDO GALENONo ratings yet
- Graded Lab Lab - 7 Introduction To Computing: Topics: If - Else Conditions, While LoopDocument5 pagesGraded Lab Lab - 7 Introduction To Computing: Topics: If - Else Conditions, While LoopqwertyNo ratings yet
- CFP Registration Process (Final) - 3Document39 pagesCFP Registration Process (Final) - 3nishiNo ratings yet
- Chapter 2: Decision MakingDocument16 pagesChapter 2: Decision Makingafzal_aNo ratings yet
- Recruitment Requisition FormDocument1 pageRecruitment Requisition FormrahulNo ratings yet
- Omm Tank, Combat, Full Tracked 105-MM Gun, M60a3 and TTS TurretDocument663 pagesOmm Tank, Combat, Full Tracked 105-MM Gun, M60a3 and TTS TurretSTGN100% (1)
- Smartotdr Ds Fop Nse AeDocument4 pagesSmartotdr Ds Fop Nse AemoneyminderNo ratings yet
- Pediatric OrthopaedicDocument66 pagesPediatric OrthopaedicDhito RodriguezNo ratings yet
- Form 1.3 Summary of Current CompetenciesDocument3 pagesForm 1.3 Summary of Current CompetenciesJinky AydallaNo ratings yet
- Materials Letters: Featured LetterDocument4 pagesMaterials Letters: Featured Letterbiomedicalengineer 27No ratings yet
- Central List of Obcs For The State of ChhatisgarhDocument6 pagesCentral List of Obcs For The State of ChhatisgarhAVINASH KUSHWAHANo ratings yet
- Introduction To Awadh Architecture: Submitted By: Utkarsh Agarwal Pratibha Verma Ankit Shukla Sunaina BansalDocument7 pagesIntroduction To Awadh Architecture: Submitted By: Utkarsh Agarwal Pratibha Verma Ankit Shukla Sunaina BansalMahak Gupta100% (1)
- Detail of Common Toilet: Section Elevation C - C' Section Elevation D - D'Document1 pageDetail of Common Toilet: Section Elevation C - C' Section Elevation D - D'RichaNo ratings yet
- MSDS Gel Sanitizer 280720-01.es - enDocument11 pagesMSDS Gel Sanitizer 280720-01.es - enCristian GomezNo ratings yet
- HahayysDocument30 pagesHahayys2BGrp3Plaza, Anna MaeNo ratings yet
- Woolworths Group Limited, Share Purchase Plan (SPP) Cancellation of Salary Sacrifice Arrangements Form F20-21Document1 pageWoolworths Group Limited, Share Purchase Plan (SPP) Cancellation of Salary Sacrifice Arrangements Form F20-21HaadS.AbbasiNo ratings yet
- Create BAPI TutorialDocument28 pagesCreate BAPI TutorialRoberto Trejos GonzalezNo ratings yet
- Occasional Paper 2 ICRCDocument82 pagesOccasional Paper 2 ICRCNino DunduaNo ratings yet
- CPD and Contracted PelvisDocument53 pagesCPD and Contracted Pelvismaxim tomuNo ratings yet
- To-Do List FormulaDocument1 pageTo-Do List FormulaPre MANo ratings yet
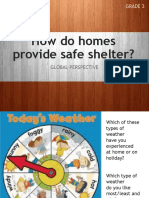
- How Do Homes Provide Safe ShelterDocument10 pagesHow Do Homes Provide Safe ShelterInda KusumawatiNo ratings yet
- Pertemuan 2 - EXERCISES Entity Relationship ModelingDocument10 pagesPertemuan 2 - EXERCISES Entity Relationship Modelingjensen wangNo ratings yet
- Enfermedades Emergentes y Embarazo - EID - November 2006 - Volume CompletoDocument187 pagesEnfermedades Emergentes y Embarazo - EID - November 2006 - Volume CompletoRuth Vargas GonzalesNo ratings yet
- Davis Michael 1A Resume 1Document1 pageDavis Michael 1A Resume 1Alyssa HowellNo ratings yet
- Annotated BibliographyDocument7 pagesAnnotated Bibliographyapi-340711045No ratings yet
- Medicinal PlantsDocument36 pagesMedicinal PlantsGuardian AngelsNo ratings yet
- Annex VI - Final Narrative ReportDocument4 pagesAnnex VI - Final Narrative ReporttijanagruNo ratings yet
- Kakhisong Church A2-ModelDocument1 pageKakhisong Church A2-ModelanzaniNo ratings yet
- Ecosystem Services From Biodiversity To Society Part 2 1St Edition Bohan Full ChapterDocument67 pagesEcosystem Services From Biodiversity To Society Part 2 1St Edition Bohan Full Chapterharold.eychaner940100% (14)