Professional Documents
Culture Documents
A Preliminary Study of The Load Bearing Capacity of A New Foil Thrust Gas Bearing
A Preliminary Study of The Load Bearing Capacity of A New Foil Thrust Gas Bearing
Uploaded by
houliukai2024Original Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
A Preliminary Study of The Load Bearing Capacity of A New Foil Thrust Gas Bearing
A Preliminary Study of The Load Bearing Capacity of A New Foil Thrust Gas Bearing
Uploaded by
houliukai2024Copyright:
Available Formats
Proceedings of ASME Turbo Expo 2018
Turbomachinery Technical Conference and Exposition
GT2018
June 11-15, 2018, Oslo, Norway
GT2018-76261
EFFECT OF AXIAL FORCE ON ROTORDYNAMICS OF A RIGID ROTOR
SUPPORTED BY FOIL BEARINGS
Wanhui Liu* Daejong Kim Kai Feng
State Key Laboratory of Department of Mechanical and State Key Laboratory of
Advanced Design and Aerospace Engineering, The Advanced Design and
Manufacturing for Vehicle Body, University of Texas at Arlington, Manufacturing for Vehicle Body,
Hunan University, Changsha 500 W. 1st Street, Arlington, TX Hunan University, Changsha
410082, China 76019, USA 410082, China
ABSTRACT subsynchronous decreases as the asymmetry of the rotor bearing
This paper investigates the effect of gas foil thrust bearing system decreases. For the out of phase imbalances, the onset
(GFTB) on the rotordynamic performance of the rotor-gas foil speed of subsynchronous motion also decreases as axial force
bearing (GFB) system. A rigid rotor supported on two gas foil increases for the large asymmetric rotor, but an opposite trend
journal bearings (GFJB) and a pair of GFTBs is studied using a was shown as the asymmetry of the rotor decreases.
five degree of freedom (5-DOF) model. The studies were *Corresponding author email: duozhu@yeah.net. The author
performed in both frequency domain using excitation frequency- was a visiting PhD student at The University of Texas at
dependent bearing coefficients (modal analyses) and non-linear Arlington when the manuscript was submitted.
analyses (time domain orbit simulations). Modal analyses were
performed for both symmetrically and asymmetrically supported NOMENCLATURE
rotor systems. For the symmetric rotor, the modal stiffness for mr Rotor mass
the conical mode increases with the axial force, while cylindrical C Damping matrix
mode is not affected. The axial force has little effects on the Cmodal Modal damping
modal damping for both the cylindrical mode and conical mode.
Thus, the natural frequency and threshold speed (stability limit) F Force matrix
for the conical mode increases as the axial force increases, while FX _ JB GFJB dynamic forces acting on the rotor in
these values for the cylindrical mode remain almost constant. For X direction
the asymmetric rotor, the modal stiffness for both the cylindrical FX _ U Imbalance forces in X directions
mode and conical mode increases with the axial force, and thus FY _ JB GFJB dynamic forces acting on the rotor in
both natural frequency and threshold speed increase with the Y direction
axial force. Rotor lateral vibrations were also predicted using FY _ U Imbalance forces in Y direction
synchronous bearing coefficients (of both GFJB and GFTB) for
both conical and cylindrical modes. The predicted rotor lateral FZ External axial force to the rotor
responses show the critical speed increases with axial force for FZ _ TB GFTB axial dynamic force to the rotor
both cylindrical mode and conical mode. The nonlinear analysis g Gravitational acceleration
using time-domain orbit simulation was also performed Dimensionless gas film thickness
including the effect of axial force on the GFTB. The effect of h
axial force on the stability of the rotor system were discussed. Ip Polar moment of inertia of the rotor
The predicted results showed that the stability of rotor system IT Translational moment of inertia of the rotor
improved as the axial force increases for Case 1 when the out of
K Stiffness matrix
phase imbalances were added on the rotor. However, the stability
K modal Modal stiffness
of the rotor system for Case 2 not only influenced by the axial
force but also influenced by how asymmetry the rotor is. For the M Mass matrix
in phase imbalances, the onset speed of subsynchronous motion mr Rotor mass
decreases as axial force increases for the large asymmetric rotor M _ JB Moments in direction caused by GFJBs
bearing system and the decrement of the onset speed of
1 Copyright © 2018 ASME
Downloaded From: https://proceedings.asmedigitalcollection.asme.org on 05/20/2019 Terms of Use: http://www.asme.org/about-asme/terms-of-use
M _ JB Moments in direction caused by GFJBs performance of a rotor supported on two bump type GFBs
theoretically and experimentally. The linear rotordynamic
M _ TB Moments in direction by GFTBs
analysis method was adopted and the predicted results were
M _ TB Moments in direction by GFTBs compared with the experiment data. The test results evidence the
nonlinear characteristics of the rotor bearing system. Pan and
M _U Moments in directions caused by
Kim [10] proposed a modal analysis method to investigate the
imbalances
stability characteristics of a rigid rotor supported by a gas-
M _U Moments in directions caused by lubricated spiral-groove conical bearing. This method was
imbalances introduced to study the rotordynamic characteristics of the gas
p Dimensionless gas pressure foil bearings [11-16] and tilting pad gas bearings [17]. Kim [11]
q Displacement matrix presented time domain orbit simulation of foil bearing-point
r Dimensionless radial coordinate mass system for the first time. The paper pointed out the linear
Dimensionless time stability analyses provide only limited information on the
t
bearing stability and the non-linear analyses are more accurate.
X Y ,Z Coordinates
Lee and Kim [18] presented a 5-DOF nonlinear analysis of rigid
z Dimensionless axial coordinate rotor supported by two radial foil bearings and one set of
Ẑ Impedance matrix doubling acting thrust foil bearings. The simulated results
Zˆ K _ modal Modal impedance revealed important role of thrust bearing in conical mode
vibration especially when the bearing span between two journal
Greek bearings is short and rotor transverse moment of inertia is large.
Excitation frequency ratio However, only symmetrical rotor system and rotor responses
Circumferential coordinate under synchronous excitations were discussed. Kim and Lee [12]
J Bearing number of GFJB applied the time domain orbit simulation method to predict the
T Bearing number of GFTB performance of the hybrid air foil bearings. Kim et al. [14]
studied the rotordynamic performance of a 120 KW oil-free gas
Coordinates
turbine generator based on the four DOF rotordynamic model.
Rotor speed
They presented the formula of modal impedance for forward
s Excitation frequency
conical motion of the 4-DOF symmetrical rotor for the first time,
Subscripts and defined the physical meaning of the modal impedance. They
X Y , Z , , Coordinates presented non-linear rotordynamic analyses of two rigid rotors,
JB Journal bearing supported by foil bearings and connected by a flexible coupling.
TB Thrust bearing The results predicted by the time domain orbit simulation
Superscripts suggested an optimum air foil bearing clearance for stability.
L Left bearing Yazdi and Kim [15] adopted the controlled hydrostatic injection
R Right bearing method to improve the rotordynamic performance of the hybrid
air foil bearings system. Both the experiment and simulation
INTRODUCTION results showed the onset speed of subsynchronous vibration was
Gas foil bearing is a promising solution in high-speed and delayed and the amplitude of the synchronous vibration at the
high-efficiency micro-turbomachinery because of its distinct critical speed was decreased significantly. Moreover, Kim et al.
advantages like oil-free, maintenance free, low drag power loss, [19] successfully demonstrated the feasibility of the hybrid air
very high operating speed, and extreme temperature operating foil bearing under 5.55g rotor’s lateral acceleration and studied
capability. GFB technologies have been made a substantial the rotor responses under forced subsynchronous excitations,
progress in the past several decades. They have been successfully which was prepared for the development of oil-free aero
applied on many high-speed turbomachines, such as air cycle propulsion. The state space simultaneous solution approach was
machines (ACM) for aircraft [1-3], high-speed air compressors proposed to investigate the nonlinear responses of foil-air
[3, 4], micro gas turbine [5, 6] and high-speed turbo blowers [3]. bearing rotor system [20-23]. The time domain simulations
DellaCorte et al. [7] demonstrated GFBs operating at extreme predicted the orbit of the rotor supported by the air foil bearings
temperatures up to 650 ℃ in excess of 30,000 cycles. DellaCorte in Refs. [20-23], which is similar with the time orbit simulation
et al. [8] conducted a series of load capacity tests with various in Ref. [11]. Bonello and Pham [20] developed efficient
combinations of shaft and GFB top foil solid lubricant coating algorithms for the simultaneous solution of the state equations
materials. Three important factors that increase GFB load governing the dynamic interaction between the air film, foil
capacity were suggested as, proper geometrical design, smooth structure and rotor in oil-free turbomachinery. The method was
surface finish, and adequate solid lubrication. applied to a turbocharger rotor which was supported on two foil
Besides improving the load capacity of the GFB, the air bearings [21]. Larsen and Santos [22] measured the unbalance
rotordynamic performance for the GFB system was also responses of a rigid rotor supported by three pads segmented air
investigated. San Andrés et al. [9] studied the rotordynamic foil bearings and the simulated nonlinear responses of the rotor
2 Copyright © 2018 ASME
Downloaded From: https://proceedings.asmedigitalcollection.asme.org on 05/20/2019 Terms of Use: http://www.asme.org/about-asme/terms-of-use
by using the state space simultaneous solution method was can excite the lateral motion of the shaft through thrust bearing.
validated by the experiment results. Larsen et al. [23] studied the The effect of defective thrust bearing (the thrust runner having a
stability of rigid rotors supported by air foil bearings through the tilted angle) on the rotor lateral responses has been studied in
nonlinear time domain simulation method and the linearized Ref. [29]. The defective thrust bearing excited the rotor lateral
frequency domain method, respectively. The predicted onset motion even though the imbalance was not applied on the rotor.
speed of instability showed significant discrepancies between the The investigations mentioned above all focus on the oil-
two methods, which is consistent with the predicted results in lubricated rotor-bearing system and just discuss the synchronous
Ref. [11]. excitations. However, there are much difference on the
All the rotordynamic studies above were based on the rotordynamic performance between the oil-lubricated rotor-
traditional rotordynamic analysis method and the effect of thrust bearing system and the rotor-GFB system. The operating speed
bearing was not taken into consideration. However, the effect of in the oil-lubricated rotor-bearing is generally larger than the first
thrust bearing on the rotordynamic responses has occurred in bending critical speed and the rotor behaves as a flexible rotor.
many experiments [24-26]. The oil-free turbocharger supported The rotor responses around the first bending critical speed attract
on two shimmed GFJBs and two four-pads GFTBs failed at the much attention. However, the rotor generally behaves as a rigid
top speed of 120 krpm, whereas the rotor operated up to 123 rotor in the normal operating speed range for the rotor-GFB
krpm without any bearing failure after replacing the two four- system and more attention is placed on the rigid mode critical
pads GFTBs by two five-pads GFTBs [24]. Theoretical analysis speeds. Moreover, there is a compliant support structure in series
that focusing on the load capacity was conducted to try to explain with the gas film, which would lead to different rotordynamic
this phenomenon. But the theoretical analysis results were performance compared with the oil-lubricated systems.
contrary to the experimental results. Two reasons were given for
the discrepancy between the experiments and predictions but the SCOPE OF THE WORK
interpretations are not persuadable. Moreover, large axial Earlier works on non-linear rotordynamics analyses on rigid
motions were measured in the experiments which indicates the rotors with foil bearing were either point mass cases [11, 12] or
axial response cannot be neglected in the rotordynamics analysis 4-DOF rotor with only two radial foil bearings [14, 20-23] or
of the rotor-GFB system. The effects of GFTB tilting angle on synchronous imbalance response simulation of 5-DOF
the rotordynamic performance of an oil-free turbo blower was symmetric rotor using time domain orbit simulation [18], or
studied experimentally in Ref. [25]. The onset speed of frequency domain and time domain non-linear analysis of
instability decreases from 13 krpm to 9 krpm as the GFTB tilting asymmetrical 4-DOF rotor without considering effect of thrust
angle increases from 0.002 rad to 0.006 rad. This phenomenon foil bearings [16]. There is little published work that gives
was ascribed to the decrease of the load capacity as the tilting detailed investigation on the effect of the GFTBs on the
angle increases. The vibration characteristics of a 75 KW turbo rotordynamic characteristics of 5-DOF asymmetrical rotor in
blower supported on GFBs were studied experimentally in Ref. both frequency domain and time domain using non-linear model.
[26]. The axial displacement is measured and its amplitude is This paper adopts a 5-DOF model for a rotor supported by two
significant. The experiment results showed the rotor lateral GFJBs and a pair of GFTBs, considering the effect of GFTBs
motions were affected by the axial excitations especially when and axial forces. Firstly, the lateral and axial modal stiffness and
the surge occurs. The axial excitation frequencies was appeared modal damping were predicted in frequency domain for both the
in the rotor lateral motion. This phenomenon demonstrates the symmetric and asymmetric rotor systems. The corresponding
axial vibration was coupled with the lateral vibration. However, natural frequencies and threshold speeds were also predicted.
Ref. [26] did not present a deep analysis about that phenomenon. Secondly, the effect of thrust bearing and axial forces on the
The experimental studies mentioned above all demonstrates that stability of the rotor-GFBs system was discussed through the
GFTBs have a great influence on the rotordynamics performance nonlinear analyses, where imbalance responses for the two cases
of the rotor-GFBs system. However, GFTBs are neglected in (symmetric and asymmetric rotors) with different axial forces
most of the rotordynamic analyses. were calculated and compared with the modal analysis results.
The effect of thrust bearing on the rotordynamic performance Another contribution of this study is the development of
has been investigated in the oil-lubricated bearing system [27- modal analysis of 5-DOF motion in frequency domain and time
30]. Mittwollen et al. [27] studied the effect of thrust bearing on domain for asymmetrical rotors, which was never been
lateral shaft vibrations. Both the theoretical and experimental investigated by other researchers.
results showed that a reduction of the total axial clearance of the
thrust bearing and an increase of the axial thrust load that applied THEORETICAL MODEL
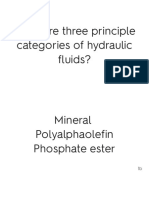
on the thrust bearing can lead a significant increase in the first Figure 1 shows the structure of the rotor-GFBs system. The
critical speed, in the amplitude at the first critical speed, and in rotor with a thrust runner in the middle is supported by two
the threshold speed of instability. Berger et al. [28] studied the GFJBs and axial load is supported by a pair of GFTBs. The
coupling between the axial dynamic behavior and the bending coordinate system used in this study is also shown in Fig. 1. The
vibrations of a flexible shaft. The shaft vibrates axially at a equations of the rotor radial motion (X and Y direction) are
frequency equal to the rotational shaft frequency when the mr X FX _ JB FX _ U mr g (1)
unbalance force is applied. Moreover, the axial dynamic force
3 Copyright © 2018 ASME
Downloaded From: https://proceedings.asmedigitalcollection.asme.org on 05/20/2019 Terms of Use: http://www.asme.org/about-asme/terms-of-use
mr Y FY _ JB FY _ U (2) axial coordinate, r is the dimensionless radial coordinate, J
where mr is the rotor mass, FX _ JB and FY _ JB are the is the bearing number of GFJB, T is the bearing number of
GFJB dynamic forces acting on the rotor in X and Y directions, GFTB, is the excitation frequency ratio, and t is the
FX _ U and FY _ U are imbalance forces in X and Y directions. dimensionless time. The methodology presented in this section
The equation of the axial motion (Z direction) of the rotor is is from previous works [14, 15, 19]. The compliant structure of
GFBs is treated as a two dimensional thin plate supported on the
mr Z FZ _ TB +FZ (3) distributed linear stiffness located at every bump pitch [31, 32].
where FZ and FZ _ TB are the external axial force and GFTB The bump stiffness is calculated using the formula suggested in
[31] for free-free cases. Effect of frictions between bumps and
axial dynamic forces to the rotor. For the conical motion ( and top foil and bearing sleeve are all consolidated as equivalent
direction), the equations can be expressed as viscous damping coefficient through structural damping model
IT I p M _ JB M _ TB M _ U (4) with loss factor of 0.2.
The equations of motions in Eqs. (1)-(5) can be also
IT I p M _ JB M _ TB M _ U (5)
represented using linear stiffness and damping coefficients
where IT and I p are the translational and polar moment of calculated by perturbation methods applied to the GFJBs and
GFTBs [32-34].
inertia of the rotor, respectively. M _ TB and M _ TB are the
Mq Cq Kq F (8)
moments in and directions by GFTBs, respectively. where M, C, K, F represent the mass, damping, stiffness, and
M _ JB and M _ JB are the moments in and directions force matrixes, respectively. q represents the displacement
caused by GFJBs, respectively. M _U and M _U are the matrix. The expressions of those matrixes are listed in the
Appendix.
moments in and directions caused by imbalances,
respectively. SIMULATION RESULTS
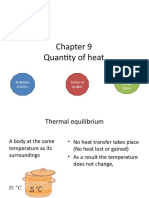
A finite element model of the rotor using commercial software
is shown in Fig. 2. Table 1 lists the parameters for the studied
rotor. The total mass and total length of the rotor are 0.958 Kg
and 150 mm, respectively. The two GFJBs located
symmetrically and the bearings’ axial span is 100 mm. The two
journal bearings are bump-type three pad GFJBs with preload
0.5. A pair of six pads GFTBs are adopted in this study. Details
of the GFJBs and GFTBs are listed in Table 2. The diameter of
the two GFJBs are 30 mm. The inner and outer diameter of the
GFTB is 35 mm and 70 mm, respectively. The taper ratio (the
ratio of the original film thickness at the leading and trailing edge
of the top foil taper) is set to 3 in the simulation.
Figure 1. Rotor configuration with GFBs and coordinate system Table 1 Parameters for studied rotor
Rotor parameters
The forces and moments by the bearings are calculated by Total mass ( mr ) 0.958 kg
solving transient Reynolds equations for ideal gases. Total length 150 mm
Dimensionless Reynolds equation in Cartesian coordinate for
Bearings’ axial span 100 mm
GFJBs is
3 p 3 p ph
2 J
ph Thrust runner diameter 70 mm
ph ph J (6) Polar moment of inertia ( I p ) 193 kg mm^2
z z t 164.7 kg mm^2
Translational moment of inertia ( IT )
The dimensionless Reynolds equation for GFTB in cylindrical Rotor mass center location 0 mm
coordinates is
Left bearing center location ( Z pL ) -50 mm
1 3 p 1 3p ph ph
rh p
2
ph
T
2T (7) Right bearing center location ( Z pR ) 50 mm
r r r r t
where p is the dimensionless gas pressure, h is the
Table 2 Parameters for GFJB and GFTB
dimensionless gas film thickness as a function of rotor motions,
Journal Bearing
is the circumferential coordinate, z is the dimensionless
4 Copyright © 2018 ASME
Downloaded From: https://proceedings.asmedigitalcollection.asme.org on 05/20/2019 Terms of Use: http://www.asme.org/about-asme/terms-of-use
Bearing diameter 30 mm
Bearing width 30 mm
Nominal clearance 40 m
Top foil thickness 0.115 mm
Bump foil thickness 0.115 mm
bump
Bump pitch 2.7 mm
Bump height 0.5 mm
Bump half length 1.1 mm
Non-dimensional preload 0.5
Pad number 3 Figure 3. Predicted damped natural frequencies of the rotor supported by gas foil
Pad angle 120 deg bearings using synchronous bearing coefficients.
Foil elastic modulus 214 GPa
MODAL ANALYSES
Poisson's ratio 0.29 Modal analyses in the excitation frequency-domain are
Load 4.69 N conducted to investigate the effect of axial force on the stability
Thrust Bearing characteristic of the rotor-GFB system. The methodology of
modal analyses for the symmetric rotor and bearing load
Bearing inner diameter 35 mm conditions have been introduced and implemented in Refs. [10-
Bearing outer diameter 70 mm 14, 17]. The rotor cylindrical and conical motions are completely
Top foil thickness 0.115 mm decoupled in this case, which is not common in the real
Bump foil thickness 0.115 mm applications. LaTray and Kim [16] extended the modal analyses
Bump pitch 2.7 mm to the 4-DOF asymmetric rotor, where the rotor and bearing load
conditions are all asymmetric. The rotor cylindrical motion and
Bump height 0.5 mm conical motion are coupled in the asymmetric rotors. However,
Bump half length 1.1 mm the thrust bearing and axial force were not considered in [16]. To
Pad number 6 investigate the effect of axial force on the dynamic performance
Pad angle 55 deg of the rotor-GFB system, modal analyses considering the thrust
bearing and axial force are presented in this study.
Inclined plane angle 22.5 deg Based on Eqs. (1)-(5), the equations of rotor motions can be
Foil elastic modulus 214 GPa rewritten into the form of eigenvalues analysis using the
Poisson's ratio 0.29 impedance matrix Ẑ (a function of both excitation frequency,
Nominal clearance 45 m s , and rotor speed, ), and the equations can be expressed as
Taper ratio 3 follows
ˆ Zˆ XY Zˆ XZ Zˆ X Zˆ X X
1 0 0 0 0 X Z XX
Figure 3 shows the predicted damped natural frequencies 0 1 0 0 0 Y ZˆYX Zˆ Zˆ Zˆ ZˆY Y
YY YZ Y
using commercial software. The natural frequency for the s 2 0 0 1 0 0 Z = Zˆ ZX Zˆ ZY Zˆ ZZ Zˆ Z Zˆ Z Z (9)
bending mode is above 300 krpm. Thus, the rotor can be treated
0 0 0 1 0 Zˆ X Zˆ Zˆ Zˆ Zˆ
as a rigid rotor for the normal operating speed. Y Z
0 1 Zˆ
0 0 0
X Zˆ Y Zˆ Z Zˆ Zˆ
Here X , Y , Z , , and are the rotor natural
modes from the static equilibrium. At the state of neutral
stability, s js (where s is now a self-excited unknown
frequency). The expression of the impedance matrix Ẑ is
listed in the Appendix. The impedance matrix includes the
stiffness and damping coefficients of the bearings as a function
of excitation frequency, gyroscopic effect, bearing locations, and
rotor inertial properties. Total combinational effect of all the
stiffness and damping coefficients appear as modal stiffness. The
modal impedance of the bearing is equivalent impedance of the
bearing in the opposite direction along the forward whirling
Figure 2. Finite element rotor model using commercial software. direction. The modal impendence can be tabulated as a function
5 Copyright © 2018 ASME
Downloaded From: https://proceedings.asmedigitalcollection.asme.org on 05/20/2019 Terms of Use: http://www.asme.org/about-asme/terms-of-use
of s by sweeping the s over range of interest. With bearing systems, where either rotor is geometrically asymmetric
and/or two radial bearings have different design parameters and
s 2 = 2 Zˆ , Eq. (9) can be rewritten as
s K operating condition even if rotor is geometrically symmetric.
Z XX Zˆ K
ˆ Zˆ XY Zˆ XZ Zˆ X Zˆ X
X
Y
ZˆYX ZˆYY Zˆ K Zˆ Zˆ Zˆ CASE 1
YZ Y Y
For symmetrical rotor-bearing system, Eq. (10) becomes
Zˆ ZX Zˆ Zˆ ZZ Zˆ K Zˆ Z Zˆ Z Z =0 (10)
Zˆ XX Zˆ K
Zˆ XY
ZY
0 0 0
ˆ
Z X ZˆY Zˆ Z Zˆ K
ˆ Zˆ X
Y
Z
ZˆYX ZˆYY Zˆ K 0 0 0
Zˆ
X Zˆ
Y Zˆ Z Zˆ Zˆ Zˆ K
0 0 Zˆ ZZ Zˆ K ˆ
Z Z
ˆ
Z Z Z =0 (13)
For nonzero eigen modes X
Y Z to
T
0 0 Zˆ
Z Zˆ Zˆ K Zˆ
exist, the determinant of the impedance matrix in Eq. (10) should
0 0 Zˆ Z Zˆ
Zˆ Zˆ K
be zero, which leads to five solutions of Zˆ K . The unknown self- and the rotor’s cylindrical motion and conical motion are
excitation frequency, s , can be found from imag( Z K (s )) 0 decoupled. The modal stiffness and damping coefficients of
cylindrical mode can be predicted by using the first two line in
while sweeping s , at the given rotor speed . It is noted it is Eq. (13).
possible that imag( Z K (s )) 0 for all s at the given rotor Figure 4 and Figure 5 show the predicted modal stiffness and
modal damping for the forward cylindrical mode and forward
speed, and in that case the self-excited vibration does not occur
conical mode versus different axial forces at 30 krpm. Both the
at the given speed. However, if s exists satisfying modal stiffness and modal damping coefficients for the
imag( Z K (s )) 0 , the corresponding s is an undamped cylindrical mode do not change as the axial force increases
natural frequency of the corresponding mode, and the following because cylindrical mode is completely decoupled from the axial
relations hold; and conical motions. However, the modal stiffness for the
conical mode increases as the axial force increases because the
real ( Zˆ K _ modal ) ks mr s2 , if cylindrical mode or axial mode
(11) rotating stiffness of the GFTB ( K and K ) contribute to
real ( Zˆ K _ modal ) ks IT s2 , if conical mode the direct stiffness of the conical motion, which can be observed
The threshold speeds for the given rotor mass and translational in the expression of the impedance matrix Ẑ . Moreover, the
moment of inertia can be expressed as modal stiffness increases as the excitation frequency increases
T s / T (12) for all the axial forces. The modal damping for the conical mode
where T s / . It is noted that the modal analyses so far varies slightly as the axial load increases because the damping
and calculation of threshold speed in Eq. (12) were done at coefficients, C and C , of the GFTB are very small [32].
particular rotor rotational speed, . In a traditional stability The synchronous modal damping for the cylindrical mode and
analysis of gas bearing-supported rotors, if T , it is conical mode are both positive, which indicates the rotor bearing
considered the rotor is stable at the given speed . However, as system would be stable if there are only synchronous excitations
will be shown in the non-linear analysis and other published (generally imbalance excitations). However, negative modal
reports [11, 14, 20-23, 35, 36], stability analysis in frequency damping is observed at low excitation frequencies for both
domain using the bearing coefficients have limitation. However, cylindrical and conical modes, which implies the high
results are presented to compare with non-linear analyses. susceptibility to instability if the low frequency external
If the excitation frequency, s , is swept over wide range disturbances are applied to the rotor. Figure 6 shows the
predicted natural frequency and threshold speed for the given
(treated as a forced excitation), the real and imaginary parts of rotor mass and translational moment of inertia at 30 krpm. Both
Zˆ K _ modal for each mode represents the modal stiffness, the natural frequency and threshold speed remain constant as the
K modal , and modal damping, Cmodal , respectively. The axial force increases for the cylindrical mode because the modal
stiffness and modal damping do not change as the axial force
damped natural frequency for the given rotor mass or increases. The natural frequency and threshold speed for the
translational moment of inertia at a certain operating speed, , cylindrical mode are ~11.7 krpm and ~17.7 krpm, respectively.
can be estimated by finding the intersection of the modal However, both the natural frequency and threshold speed for the
stiffness, K modal , and mr s2 or IT s2 . forward conical mode increases as the axial force increases. The
Modal analyses for two different rotor-bearing systems are natural frequency for the conical mode increases from ~16.4
discussed in this study. Case 1 represents the symmetric rotor- krpm to ~27.5 krpm and the threshold speed increases from
bearing systems where rotor is geometrically symmetric and also ~25.0 krpm to ~42.6 krpm as the axial force increases from 0 N
two radial bearings (with identical design parameters) share the to 120 N. The results indicate the stability of conical mode is
equal rotor weight. Case 2 represents all other rotor-bearing improved as the axial force increases.
configurations different from Case 1, i.e., the asymmetric rotor-
6 Copyright © 2018 ASME
Downloaded From: https://proceedings.asmedigitalcollection.asme.org on 05/20/2019 Terms of Use: http://www.asme.org/about-asme/terms-of-use
Figure 4. Predicted modal stiffness of (a) forward cylindrical mode and (b)
forward conical mode for different axial forces at 30krpm. Figure 6. (a) Natural frequency and (b) threshold speed of the forward cylindrical
mode and conical mode for different axial forces at 30 krpm.
Figure 5. Predicted modal damping of the (a) forward cylindrical mode and (b) Figure 7. (a) Modal stiffness and (b) natural frequency of the axial mode for
forward conical mode for different axial forces at 30 krpm. different axial forces at 30 krpm.
7 Copyright © 2018 ASME
Downloaded From: https://proceedings.asmedigitalcollection.asme.org on 05/20/2019 Terms of Use: http://www.asme.org/about-asme/terms-of-use
system becomes asymmetric. This case may not be very common
in the real applications but it is possible to adopt the different
clearances between two bearings if thermal expansions of the
bearing journals are different. More common asymmetrical rotor
configuration would be geometrically asymmetric rotor with
identical bearings. However, current study focuses on symmetric
rotor with two different bearing clearances. The translational
motion, axial motion and rotating motion are all coupled in this
case.
Figure 9 and Figure 10 show the predicted modal stiffness and
modal damping for the forward cylindrical mode and forward
conical mode versus different axial forces at 30 krpm. The modal
stiffness for both the cylindrical mode and conical mode
increases as the axial force increases. It implies that the thrust
bearing stiffness affects both the cylindrical mode and conical
mode, which is different from the symmetric case. The reason is
that the rotor cylindrical motion is coupled with the conical
motion in this case. Similar with the modal damping in Case 1,
negative modal damping is also observed at low excitation
frequency ratio for both the cylindrical and conical modes, which
indicates high susceptibility of instability under low frequency
external disturbance. The modal damping decreases as axial
force increases at low excitation frequency, while the value
increases as axial forces increases at high excitation frequencies
for the forward cylindrical mode. The modal damping for the
Figure 8. Imbalance responses in the (a) vertical and (b) horizontal directions at forward conical mode are close for different axial forces except
the left end for different axial forces. Imbalance distribution is out of phase at for the high frequency ratios. Figure 11 shows the damped
two ends of the rotor. natural frequencies and threshold speeds of the forward
cylindrical mode and conical mode for different axial forces at
Figure 7 shows the modal stiffness and natural frequency of 30 krpm. The natural frequency for both the cylindrical mode
the axial motion for different axial forces at 30 krpm. The modal and conical mode increases as the axial load increases. The
stiffness increases significantly as the axial force increases as damped natural frequency for the forward cylindrical mode
expected. Moreover, the modal stiffness increases slightly as the increases from ~10.1 krpm to ~12.9 krpm as the axial load
excitation frequency increases. The natural frequency for the increases from 0 N to 120 N. The natural frequency for the
axial motion increases from ~5.0 krpm to ~45.0 krpm as the axial forward conical mode increases from 20.3 krpm to 29.3 krpm.
force increases from 0 N to 120 N. Similarly, the threshold speed for both the cylindrical mode and
To investigate the effect of axial force on the rotor responses, conical mode increases as the axial load increases, which
the imbalance responses of the symmetric rotor-bearing system indicates the stability is improved as the axial force increases.
are predicted using the 5-DOF rotor model. Considering that the The threshold speed for the cylindrical mode increases from
stiffness and damping coefficients of the thrust foil bearing only ~20.3 krpm to ~23.1 krpm and the threshold speed for the conical
affect the conical mode, a pair of 0.5 g-mm out of phase mode increases from ~31.4 krpm to 47.6 krpm as the axial force
imbalances are added at the two ends of the rotor. Figure 8(a) and increases from 0 N to 120 N. The modal stiffness and damped
8(b) show the predicted imbalance responses at the left end of natural frequency for the axial motion are also predicted for this
the rotor in the vertical and horizontal directions, respectively, case. As shown in Fig. 12(a), the modal stiffness increases
with different axial forces. As the axial force increases, the significantly as the axial force increases. Moreover, the modal
critical speed increases significantly in both the horizontal and stiffness increases slightly as the excitation frequency ratio
vertical directions and the results are consistent with the modal increases. The damped natural frequency increases from ~5.1
analyses. It is noted the imbalance response analyses use krpm to ~45.1 krpm as the axial force increases from 0 N to 120
synchronous bearing coefficients, and modal damping at N.
synchronous excitations are all positive as shown in Figure 5. The imbalance responses of the rotor are predicted based on
Therefore, no instability is observed any prediction in Figure 8. the 5-DOF rotor model. A pair of 0.5 g-mm in phase imbalances
are added at the two ends of the rotor considering the imbalance
CASE 2 can excite cylindrical, axial and conical motions all together.
The geometry of the rotor is the same with Case 1, while the Figure 13 shows the imbalance responses in the vertical and
left bearing has a radial clearance of 30 m and the right bearing horizontal directions at the left end for different axial forces. Two
has 60 m radial clearance. This would lead the rotor-bearing critical speeds are shown in the responses because both the
8 Copyright © 2018 ASME
Downloaded From: https://proceedings.asmedigitalcollection.asme.org on 05/20/2019 Terms of Use: http://www.asme.org/about-asme/terms-of-use
Figure 11. (a) Natural frequency and (b) threshold speed of the forward
Figure 9. Predicted modal stiffness of the (a) forward cylindrical mode and (b)
cylindrical mode and conical mode for different axial forces at 30 krpm.
forward conical mode for different axial forces at 30 krpm.
Figure 10. Predicted modal damping of the (a) forward cylindrical mode and (b) Figure 12. (a) Modal stiffness and (b) natural frequency of the axial motion at 30
forward conical mode for different axial forces at 30 krpm. krpm.
9 Copyright © 2018 ASME
Downloaded From: https://proceedings.asmedigitalcollection.asme.org on 05/20/2019 Terms of Use: http://www.asme.org/about-asme/terms-of-use
Figure 14 shows the waterfall plots for vertical vibration at
rotor left end for Case 1 rotor-bearing system when the axial
forces are 0N and 60N, respectively for out of phase imbalance
of 0.5 g-mm at the two ends of the rotor. The results at the right
end are similar to those at the left end thus they are not shown
for simplicity. Clear synchronous motions are shown in both
waterfall plots. Both the amplitude and frequency of the main
subsynchronous motion increase as the speed increases. Note
that as the axial force increases from 0 N to 60 N, the onset speed
of subsynchronous motions increase from 19 krpm to 25 krpm,
which means the stability of the rotor-bearing system is
improved. This agree with the results of the linear analysis. It is
noted that out-of-phase imbalance is imposed in Figure 14
because axial force has no effect on the cylindrical mode of Case
1 rotor.
Figure 13. Imbalance responses in the (a) vertical and (b) horizontal directions
for different axial forces. Imbalance distribution is in phase at the two ends of the
rotor
cylindrical and conical modes are excited. Critical speeds in both
cylindrical and conical modes increase as the axial load
increases. This agrees with the modal analyses, where both
modal stiffness and damped natural frequency increase with
axial force for both modes.
The frequency domain modal analyses and imbalance
responses above are based on the linear dynamic coefficients of
the GFJBs and GFTBs predicted using the perturbation method.
The linear rotordynamic analyses can predict the natural
frequencies accurately. It is further noted there are a few cases
that linear analyses predict onset speed of instability quite
accurately, and these cases are very lightly loaded single pad
circular foil bearings and rigid walled circular gas bearings.
However, numerous other works suggest that the linear analyses
provide limited information about the rotor-bearing stability [11,
14, 20-23, 35, 36]. Typically gas bearings with non-circular
Figure 14. Waterfall plots for vertical vibration at the rotor left end for Case 1
geometry such as tilting pad gas bearings [37, 38], Rayleigh when the axial force is (a) 0 N and (b) 60 N, respectively.
step/lobed gas bearings [39], hydrodynamically preloaded
(lobed) foil bearings [35] do show discrepancies between the Figure 15 shows the waterfall plots for the vertical vibration
linear and non-linear analyses regardless of imbalance condition. at the rotor left end for Case 2 rotor-bearing system when the
axial forces are 0 N and 60 N, respectively for in phase
NONLINEAR ANALYSIS imbalance of 0.5 g-mm at the two ends of the rotor (in-phase
The nonlinear analyses in this section integrate Eqs. (1)~(7) imbalance is used because it can excite all modes). Contrary to
along with foil deformation in time domain, i.e., orbit the results for Case 1, the onset speed of subsynchronous
simulations, to investigate the effect of axial force on the vibrations decreases from 23 krpm to 19 krpm as the axial load
rotordynamic responses. increases from 0 N to 60 N. This result is contrary to the linear
analysis, and the reason is as following: The restoring moment
10 Copyright © 2018 ASME
Downloaded From: https://proceedings.asmedigitalcollection.asme.org on 05/20/2019 Terms of Use: http://www.asme.org/about-asme/terms-of-use
on the shaft created by the thrust bearing changes the rotor closer. Finally, the onset speeds of subsynchronous vibration
eccentricities at the two journal bearings for different axial become the same for the axial force 0 N and 60 N when the left
forces. The restoring moment reduces the tilting of the rotor, and bearing clearance is equal to the right bearing clearance
thus the eccentricity of the left bearing (small clearance) (symmetric rotor). The cylindrical mode is the main motion with
increases and the eccentricity of the right bearing (large in phase imbalance, thus the change in eccentricity in the bearing
clearance) decreases. The reduction of eccentricity in the right with larger clearance has a larger influence on the rotor stability.
bearing deteriorates the stability of the right bearing and thus Table 4 lists the onset speed of subsynchronous vibrations for
deteriorates the stability of the entire rotor-bearing system. In the different bearing clearance combinations when the imbalances
linear analyses, the static eccentricities of the GFJBs (used to are in out of phase. The onset speed of subsynchronous motion
predict the bearing coefficients) are decided by only the rotor for axial force of 0 N is higher than that for axial force of 60 N
weight shared by these bearings, and the thrust runner is assumed when the difference in bearing clearances is very large. However,
to be parallel with the thrust bearing regardless of the rotor as the difference in bearing clearances decreases, the onset speed
weight distribution. Therefore, the change in eccentricities in the of subsynchronous motion increases with the axial force. The
radial bearings due to axial force on the thrust bearing is not onset speed of subsynchronous vibration increases by 6 krpm
considered in the linear analysis. when the rotor is symmetrical. Therefore, in general, axial force
increases the stability as long as the difference in clearances is
not significant.
Table 3 Onset speed of subsynchronous motions for different bearing clearance
differences between the left journal bearing and right journal bearing. Imbalances
distribution is in phase at the two ends of the rotor.
Axial force 0 N Axial force 60 N
CL=30 m, CR=60 m 23 krpm 19 krpm
CL=40 m, CR=60 m 21 krpm 19 krpm
CL=40 m, CR=50 m 20 krpm 20 krpm
CL=40 m, CR=40 m 18 krpm 18 krpm
Table 4 Onset speed of subsynchronous motions for different bearing clearance
differences between the left journal bearing and right journal bearing. Imbalances
distribution out of phase at the two ends of the rotor.
Axial force 0 N Axial force 60 N
CL=30 m, CR=60 m 23 krpm 22 krpm
CL=40 m, CR=60 m 20 krpm 22 krpm
CL=40 m, CR=50 m 17 krpm 23 krpm
CL=40 m, CR=40 m 19 krpm 25 krpm
SUMMARY AND CONCLUSIONS
The effect of axial force on the rotordynamic performance of
a rigid rotor which was supported on two GFJBs and a pair of
GFTBs was investigated in this study. Both the frequency
Figure 15. Waterfall plots for vertical vibration at the rotor left end for Case 2
domain and time domain analyses were conducted based on the
when the axial force is (a) 0 N and (b) 60 N, respectively. 5-DOF model. Both the symmetric and asymmetric rotor cases
were discussed.
Table 3 lists the onset speed of subsynchronous vibrations for Modal analyses for the symmetric rotor-bearing system (Case
different bearing clearance combinations between the left journal 1) show the conical modal stiffness increases with the axial
bearing and right journal bearing for the in-phase imbalance. force, whereas the cylindrical mode is not influenced. The axial
When the left bearing clearance is 30 m and the right bearing is force had little influence on the modal damping for both
60 m (asymmetry is stronger), the onset speed of cylindrical and conical modes. The damped natural frequency
subsynchronous vibration decreases by 4 krpm as the axial force and threshold speed for the conical mode increase with the axial
increases from 0 N to 60 N. As the difference in clearances force, while those for the cylindrical mode are not affected. The
between the left and right bearings decreases, the onset speeds of predicted rotor lateral responses with out of phase imbalances
subsynchronous vibrations for axial force 0 N and 60 N become
11 Copyright © 2018 ASME
Downloaded From: https://proceedings.asmedigitalcollection.asme.org on 05/20/2019 Terms of Use: http://www.asme.org/about-asme/terms-of-use
show the conical mode critical speed increases as the axial force It is further noted that the current case studies of asymmetric
increases. rotor-bearing system were limited to the geometrically
For the asymmetric rotor-bearing system (Case 2), the natural symmetric rotor supported by two radial bearings with different
frequency and threshold speed for both the cylindrical and clearances. Geometrically asymmetric rotor configurations are
conical modes increase with the axial force because the modal beyond the scope of current work because there is no unique
stiffness for both modes increases with the axial force. The asymmetric rotor configuration. However, the 5-DOF modal
predicted rotor lateral responses showed the critical speeds for analyses and nonlinear analyses can be applied to any arbitrary
both cylindrical and conical modes increase with the axial force. asymmetric rotor-bearing system, and each case has to be
The axial modal stiffness and damped natural frequency increase investigated case by case.
with the axial force for both symmetric and asymmetric rotor-
bearing systems. ACKNOWLEDGEMENT
The nonlinear analyses using time-domain orbit simulations The lead author appreciates China Scholarship Council
were performed to investigate the effect of axial force on the (CSC) for scholarship for 12 months to stay at University of
rotordynamic performance focusing on the stability. For Case 1, Texas at Arlington for the research presented in this paper. The
the onset speeds of subsynchronous motions increase as the axial author also acknowledges help and support from other PhD
force increases from 0 N to 60 N, which agrees with the linear students in Dr. Daejong Kim’s group and staff at Mechanical and
analyses. However, for Case 2, the onset speeds of Aerospace Engineering at the University of Texas at Arlington
subsynchronous motion decrease from 23 krpm to 19 krpm as to support the visiting student position.
the axial force increases from 0 N to 60 N because the rotor The second author, Dr. Daejong Kim has a potential research
eccentricities at the two journal bearings change in a way to conflict of interest due to a financial interest with company
deteriorate the stability. As the difference in bearing clearance Bellkim Energy LLC. A management plan has been created to
reduces, stability changes slightly for in-phase imbalance, while preserve objectivity in research in accordance with UTA policy.
the stability improved significantly for out-of-phase imbalance.
The findings in the study indicates the stability characteristics APPENDIX
of rotor-bearing systems is affected by not only the rotor The mass, damping, and stiffness matrixes are expressed as
geometrical configurations but also clearance difference in two follows:
radial bearings due to various reasons such as different mr 0 0 0 0
centrifugal expansions and thermal expansions within the rotor. 0 m 0 0 0
Linear method using the bearing coefficients has a limited r
capability to consider these factors and only non-linear analyses M 0 0 mr 0 0
give better insight to the rotor-bearing stability. Linear analysis 0 0 0 IT 0
method is available in predicting the rotor responses and stability 0 0 0 0 IT
only when the perturbation assumption is satisfied.
L
C XX R
+C XX L
C XY C XY
R
0 C XY
L
Z pL C XY
R
Z pR L
C XX Z pL C XX
R
Z pR
CYXL +CYXR CYYL +CYYR
0 CYYL Z pL +CYY
R
Z pR CYXL Z pL +CYXR Z pR
C= 0 0 L
CZZ +CZZR
CZL +CZR CZL +CZR
CYX Z p +CYX Z p CYY Z p +CYY Z p C Z +C Z CYX Z pL Z pL C C I p
R R L L R R L L L R
C Z Z +CYYL Z pL Z pL +CL +CR
R
YY
R
p
R
p
R
Z pR Z pR +CYX L L R
L L R R
C XX Z p +C XX Z p C XYL
Z pL +C XY
R
Z pR CLZ +CR Z C XY
L
Z pL Z pL +C XY
R
Z pR Z pR CL C
R
+I p L
C XX Z pL Z pL +C XX
R
Z pR Z pR +C
L
+CR
L
K XX K XX
R
K XYL
K XY
R
0 K XY
L
Z pL K XY
R
Z pR L
K XX Z pL K XX
R
Z pR
KYX L R
+KYX KYYL +KYYR 0 KYYL Z pL +K YYR Z pR L
K YX Z pL +K YXR
Z pR
K 0 0 L R
K ZZ +K ZZ K ZL K ZR K ZL K ZR
KYX Z p +KYX Z p KYY Z p +KYY Z p K Z +K Z KYX Z p Z p +KYX Z p Z p K K
R R L L R R L L L R
KYYR Z pR Z pR +KYYL Z pL Z pL +K L +K R R R R L L L L R
L L
K XX Z p +K XX Z p
R R L
K XY Z pL +K XY
R
Z pR KLZ +KRZ K XY
L
Z pL Z pL +K XY
R
Z pR Z pR KL KR L
K XX Z pL Z pL +K XXR
Z pR Z pR +KL R
+K
The stiffness and damping coefficients in the matrixes are K K XY C C XY
from the dynamic stiffness and damping coefficients of the K J XX C J XX
KYX KYY CYX CYY
GFJBs and GFTBs.
The dynamic stiffness and damping matrixes for the GFJB are The dynamic stiffness and damping matrixes for the GFTB are
12 Copyright © 2018 ASME
Downloaded From: https://proceedings.asmedigitalcollection.asme.org on 05/20/2019 Terms of Use: http://www.asme.org/about-asme/terms-of-use
K ZZ K Z K Z CZZ CZ CZ X
Y
KT K Z K K CT C Z C C
q Z
K Z K K C Z C C
The superscript ‘L’ and ‘R’ in the matrixes represent the left
GFB and the right GFB, respectively. Z pL and Z pR represent Here mL and mR represent the imbalance mass at the left
the position along axial Z of the left GFJB and right GFJB in the side and right side of the rotor, respectively. u L and u R
coordinate system, respectively. represent the imbalance radius at the left side and right side of
The force and displacement matrixes are expressed as follows the rotor, respectively. L and R represent the imbalance
mLuL 2 cos t +L mRu R 2 cos t +R mr g
phase angle at the left side and right side of the rotor,
mLu L sin t +L mRu R sin t +R
2 2
respectively. Z pL _ U and Z pR _ U represent the position of the
F FZ
mLuL sin t L Z p mRu R sin t R Z p
2 L _U 2 R _U imbalance at the left side and right side of the rotor in the
coordinate system, respectively.
mRu R 2 cos t R Z pR _ U mLu L 2 cos t L Z pL _ U
The expression of the impedance matrix Ẑ is shown below
L
K XX K XX
R
/ mr K L
XY K XY
R
/ mr 0
K XY
L R
Z pL K XY Z pR / mr K ZL
XX
L
p K XX
R
Z pR / mr
L R
KYX +KYX / mr K L
YY +K R
YY /m r 0 K Z +K Z / m
L
YY
L
p
R
YY
R
p r K Z
L
YX
L
p+K Z R
YX
R
p /m
r
Zˆ = 0 0 L
K ZZ R
+K ZZ / mr K K / m
L
Z
R
Z r K Z K Z / mr
L R
L
KYX Z p +KYX Z p / IT
R R L R
KYY Z pR +KYY
L
Z pL / IT K L
Z +KRZ / IT R
KYY Z pR Z pR +KYY
L
Z pL Z pL +KL +KR / IT
KYXR
Z pR Z pR +KYXL
Z pL Z pL K
L
K
R
/ IT
L L
XX p
K Z +K XX R
Z pR / IT L
K XY Z pL +K XY
R
Z pR / IT K
L
Z +KRZ / I T
K XY
L
Z pL Z pL +K XY
R
Z pR Z pR K
L
K
R
/ IT L
K XX Z pL Z pL +K XX
R
Z pR Z pR +K
L R
+K
/ IT
L
C XX R
+C XX / mr C L
XY C R
XY/m r 0
C Z C Z
L
XY
L
p /m R
XY
R
p r CL
XX Z C
L
p
R
XX Z /m
R
p r
L
R
CYX +CYX / mr C L
YY
R
+CYY /m r 0 C Z +C Z / m
L
YY
L
p
R
YY
R
p r
L
C L
YX Z p +CYX p
R R
Z /m
r
+ js 0 0 C L
ZZ +C R
ZZ /m r C +C / m
L
Z
R
Z r
CZL +CZR /m
r
R
CYX Z p +CYX Z p / IT
R L L
C Z +C Z
R
YY
R
p
L
YY
L
p / I T C L
Z +C R
Z / I T C R
YY
R
p
R
p
L
YY
L
Z Z +C Z Z +C +C / IT
p
L
p
L R
CYX
R
Z pR Z pR +CYX L
Z pL Z pL C L
CR
I p / IT
L L R R
C XX Z p +C XX Z p / IT C L
XY
L
Z +C Z
p
R
XY
R
p / I T C L
Z +C Z R
/ I T
C Z Z +C Z Z C C +I p / IT
L
XY
L
p
L
p
R
XY
R
p
R
p
L R
L
C XX Z pL Z pL +C XX
R
Z pR Z pR +C
L
+CR
/ IT
[7] DellaCorte, C., Lukaszewicz, V., Valco, M. J., Radil, K., and
REFERENCE Heshmat, H., 2000, "Performance and durability of high
[1] Agrawal, G. L., 1997, "Foil Air/Gas Bearing Technology— temperature foil air bearings for oil-free turbomachinery,"
An Overview," ASME paper (97-GT), p. 347. Tribology transactions, 43(4), pp. 774-780.
[2] Emerson, T., 1978, "Application of foil air bearing [8] DellaCorte, C., Zaldana, A. R., Radil, K.C., 2004, "A
turbomachinery in aircraft environmental control systems." Systems Approach to the Solid Lubrication of Foil Air Bearings
[3] "Neuros, 2017, “Descriptions of Neuros Co. Ltd, Product for OilFree Turbomachinery," Journal of Tribology, 126(1), pp.
Line of Turbo Blowers, Turbo Compressors, and Generators,” 200-207.
Neuros Co., Ltd., Daejeon, South Korea, accessed Aug. 25, [9] Andres, L. S., Rubio, D., and Kim, T. H., 2007,
2017, http://www.neuros.com/." "Rotordynamic performance of a rotor supported on bump type
[4] "KTURBO, 2017, “Descriptions of KTURBO, Inc., Product foil gas bearings: Experiments and predictions," J Eng Gas Turb
Line of Turbo Blowers, Turbo Compressors, and Generators,” Power, 129(3), pp. 850-857.
KTURBO, Inc., Chungbuk, South Korea, accessed Aug. 25, [10] Pan, C. H., and Kim, D., 2007, "Stability characteristics of
2017, http://eng.kturbo.com/products/products02.jsp." a rigid rotor supported by a gas-lubricated spiral-groove conical
[5] "Capstone Turbine Corporation, 2017, “Description of bearing," Journal of Tribology, 129(2), pp. 375-383.
Capstone Microturbines,”Capstone Turbine Corporation, [11] Kim, D., 2007, "Parametric studies on static and dynamic
Chatsworth, CA, accessed Aug. 25, 2017, performance of air foil bearings with different top foil
https://www.capstoneturbine.com." geometries and bump stiffness distributions," Journal of
[6] "Bladon Jets, 2017, “Description of Micro Gensets,” Bladon Tribology, 129(2), pp. 354-364.
Jets, Coventry, UK, accessed Aug. 25, 2017, [12] Kim, D., and Lee, D., 2010, "Design of three-pad hybrid air
http://www.bladonjets.com." foil bearing and experimental investigation on static
13 Copyright © 2018 ASME
Downloaded From: https://proceedings.asmedigitalcollection.asme.org on 05/20/2019 Terms of Use: http://www.asme.org/about-asme/terms-of-use
performance at zero running speed," Journal of Engineering for [26] Kim, K.-S., and Lee, I., 2007, "Vibration Characteristics of
Gas Turbines and Power, 132(12), p. 122504. a 75kW Turbo Machine With Air Foil Bearings," Journal of
[13] Kim, D., and Varrey, M. K., 2012, "Imbalance Response and engineering for gas turbines and power, 129(3), pp. 843-849.
Stability Characteristics of a Rotor Supported by Hybrid Air Foil [27] Mittwollen, N., Hegel, T., and Glienicke, J., 1991, "Effect
Bearings," Tribology Transactions, 55(4), pp. 529-538. of hydrodynamic thrust bearings on lateral shaft vibrations,"
[14] Kim, D., Lee, A. S., and Choi, B. S., 2014, "Evaluation of Journal of Tribology, 113(4), pp. 811-818.
foil bearing performance and nonlinear rotordynamics of 120 kw [28] Berger, S. b., Bonneau, O., and Fre⁁ne, J., 2000, "Influence
oil-free gas turbine generator," Journal of Engineering for Gas of Axial Thrust Bearing on the Dynamic Behavior of an Elastic
Turbines and Power, 136(3), p. 032504. Shaft: Coupling Between the Axial Dynamic Behavior and the
[15] Yazdi, B. Z., and Kim, D., 2017, "Rotordynamic Bending Vibrations of a Flexible Shaft," Journal of Vibration and
Performance of Hybrid Air Foil Bearings With Regulated Acoustics, 123(2), pp. 145-149.
Hydrostatic Injection," Journal of Engineering for Gas Turbines [29] Berger, S., Bonneau, O., and Frêne, J., 2000, "Influence of
and Power, 140(1), pp. 012506-012506-012508. axial thrust bearing defects on the dynamic behavior of an elastic
[16] LaTray, N., and Kim, D., 2017, "Rotordynamic shaft," Tribology International, 33(3–4), pp. 153-160.
Performance of a Shaft With Large Overhung Mass Supported [30] Jiang, P.-L., and Yu, L., 1998, "Effect of a hydrodynamic
by Foil Bearings," Journal of Engineering for Gas Turbines and thrust bearing on the statics and dynamics of a rotor-bearing
Power, 139(4), p. 042506. system," Mechanics Research Communications, 25(2), pp. 219-
[17] Kim, D., Rimpel, A. M., Chang, S. S., and Kim, J. H., 2009, 224.
"Design and manufacturing of mesoscale tilting pad gas bearings [31] Iordanoff, I., 1999, "Analysis of an aerodynamic compliant
for 100–200 W class powerMEMS applications," Journal of foil thrust bearing: method for a rapid design," Journal of
Engineering for Gas Turbines and Power, 131(4), p. 042503. Tribology, 121(4), pp. 816-822.
[18] Lee, D., Kim D., 2010, "Five degrees of freedom nonlinear [32] Lee, D., and Kim, D., 2011, "Design and performance
rotor dynamics model of a rigid rotor supported by multiple prediction of hybrid air foil thrust bearings," Journal of
airfoil bearings," Proceedings of the 8th IFToMM International Engineering for Gas Turbines and Power, 133(4), p. 042501.
Conference on Rotordynamics, KIST, Seoul, Korea. [33] Feng, K., and Kaneko, S., 2009, "Calculation of Dynamic
[19] Kim, D., Nicholson, B., Rosado, L., and Givan, G., 2017, Coefficients for Multiwound Foil Bearings," Journal of System
"Rotordynamics Performance of Hybrid Foil Bearing Under Design and Dynamics, 3(5), pp. 841-852.
Forced Vibration Input," Journal of Engineering for Gas [34] Peng, J.-P., and Carpino, M., 1993, "Calculation of stiffness
Turbines and Power, 140(1), pp. 012507-012507-012512. and damping coefficients for elastically supported gas foil
[20] Bonello, P., and Pham, H. M., 2014, "The efficient bearings," Journal of Tribology, 115(1), pp. 20-27.
computation of the nonlinear dynamic response of a foil–air [35] Bou-Said, B., Grau, G., and Iordanoff, I., 2008, "On
bearing rotor system," Journal of Sound and Vibration, 333(15), nonlinear rotor dynamic effects of aerodynamic bearings with
pp. 3459-3478. simple flexible rotors," Journal of Engineering for Gas Turbines
[21] Bonello, P., and Pham, H. M., 2014, "Nonlinear dynamic and Power, 130(1), p. 012503.
analysis of high speed oil-free turbomachinery with focus on [36] Feng, K., Liu, W., Zhao, X., and Li, W., 2017, "Nonlinear
stability and self-excited vibration," Journal of Tribology, Numerical Prediction of a Rotor–Bearing System Using Damped
136(4), pp. 216-223. Flexure Pivot Tilting Pad Gas Bearings," Tribology
[22] Larsen, J. S., and Santos, I. F., 2015, "On the nonlinear Transactions, 60(3), pp. 448-459.
steady-state response of rigid rotors supported by air foil [37] Sim, K., and Kim, D., 2006, "Stability Analyses on Flexure
bearings—theory and experiments," Journal of Sound and Pivot Tilting Pad Gas Bearings for Microturbomachinery,"
Vibration, 346(1), pp. 284-297. STLE/ASME 2006 International Joint Tribology Conference,
[23] Larsen, J. S., Santos, I. F., and Osmanski, S. V., 2016, pp.1281-1289.
"Stability of rigid rotors supported by air foil bearings: [38] Sim, K., and Kim, D., 2005, "Design and Hydrodynamic
comparison of two fundamental approaches," Journal of Sound Performance of Hybrid Flexural Pivot Gas Bearings for High
and Vibration, 381, pp. 179-191. Speed Oil-Free Micro Turbomachinery," ASME Journal of
[24] Lee, Y.-B., Kwon, S. B., Kim, T. H., and Sim, K., 2013, Tribology, 129(1), pp. 112-119.
"Feasibility Study of an Oil-Free Turbocharger Supported on [39] Wilde, D., and San Andrés, L., 2003, "Comparison of
Gas Foil Bearings Via On-Road Tests of a Two-Liter Class Rotordynamic Analysis Predictions With the Test Response of
Diesel Vehicle," Journal of Engineering for Gas Turbines and Simple Gas Hybrid Bearings for Oil-Free Turbomachinery,"
Power, 135(5), p. 052701. Journal of Engineering for Gas Turbines and Power, 128(3), pp.
[25] Kim, T. H., Lee, Y. B., Kim, T. Y., and Jeong, K. H., 2012, 634-643.
"Rotordynamic Performance of an Oil-Free Turbo Blower
Focusing on Load Capacity of Gas Foil Thrust Bearings," J Eng
Gas Turb Power, 134(2).
14 Copyright © 2018 ASME
Downloaded From: https://proceedings.asmedigitalcollection.asme.org on 05/20/2019 Terms of Use: http://www.asme.org/about-asme/terms-of-use
You might also like
- Shaft Misalignment and Vibration - A ModelDocument13 pagesShaft Misalignment and Vibration - A ModelPeak NeoNo ratings yet
- M208Document1 pageM208FRANZ RICHARD SARDINAS MALLCO0% (1)
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- A Criticial Analysis of Tatara Bridge, JapanDocument10 pagesA Criticial Analysis of Tatara Bridge, JapanYati Aggarwal100% (1)
- Analytical Modelling of Density of States of CNTDocument34 pagesAnalytical Modelling of Density of States of CNTAyaz Masud SezanNo ratings yet
- Vung Ang 1 Thermal Power Plant 2 X 600Mw: Chapter 5 Boiler Piping System InstructionDocument8 pagesVung Ang 1 Thermal Power Plant 2 X 600Mw: Chapter 5 Boiler Piping System InstructionHai Nguyen100% (1)
- Effects of Static and Imbalance Loads On Nonlinear Response of Rigid Supported On Gas Foil BearingsDocument22 pagesEffects of Static and Imbalance Loads On Nonlinear Response of Rigid Supported On Gas Foil BearingsrahulmecNo ratings yet
- Consideration of Suspension Mechanism WithDocument10 pagesConsideration of Suspension Mechanism WithRushik KudaleNo ratings yet
- Sommerfeld Effect 1Document20 pagesSommerfeld Effect 1Harsh RaoNo ratings yet
- Rotordynamic Analysis of Vertical Rotors With XLRotorDocument1 pageRotordynamic Analysis of Vertical Rotors With XLRotorclaudehackerNo ratings yet
- InfluenceOfBearingAsymmetryOnStability LinkedDocument28 pagesInfluenceOfBearingAsymmetryOnStability LinkedRotor IntrnlNo ratings yet
- Fig.3.2 Using Shaft Stick: Copy Right of Gvibration Busters Pvt. LTDDocument5 pagesFig.3.2 Using Shaft Stick: Copy Right of Gvibration Busters Pvt. LTDEzhil Vendhan PalanisamyNo ratings yet
- Conical Rotor Balancing TechniqueDocument8 pagesConical Rotor Balancing TechniqueRazhmi ranjanNo ratings yet
- Rotordynamic Characteristics Analysis For An AeroDocument7 pagesRotordynamic Characteristics Analysis For An AeroyunusNo ratings yet
- Application of Permanent Magnet Bias Magnetic Bearings To An Energy Storage FlywheelDocument15 pagesApplication of Permanent Magnet Bias Magnetic Bearings To An Energy Storage FlywheelcoolcoliNo ratings yet
- Axial Position and Speed Vector Control of The Inset PermanentDocument6 pagesAxial Position and Speed Vector Control of The Inset PermanentLê Đức ThịnhNo ratings yet
- (2017) - A Novel Approach To Study Effects of Asymmetric Stiffness On Parametric Instabilities of Multi-Rotor-SystemDocument14 pages(2017) - A Novel Approach To Study Effects of Asymmetric Stiffness On Parametric Instabilities of Multi-Rotor-SystemAgustín Erasmo Juárez MartínezNo ratings yet
- 1 s2.0 S0022460X15010512 Main PDFDocument12 pages1 s2.0 S0022460X15010512 Main PDFpalash22No ratings yet
- Asymmetric Cylindrical GearsDocument6 pagesAsymmetric Cylindrical Gearsकृष्णकुमार दत्तात्रेय जोशीNo ratings yet
- GC Cam Design and Analysis PDFDocument6 pagesGC Cam Design and Analysis PDFrahulNo ratings yet
- New Model of Tire Overturning Moment CharacteristiDocument8 pagesNew Model of Tire Overturning Moment CharacteristiKABERA CYUSA MariusNo ratings yet
- Application of Permanent Magnet Bias Magnetic Bearings To An Energy Storage FlywheelDocument15 pagesApplication of Permanent Magnet Bias Magnetic Bearings To An Energy Storage FlywheelmivanoNo ratings yet
- A Novel Magnetic Gear For High Speed Motor System: Kohei Aiso, Kan Akatsu, Yasuaki AoyamaDocument7 pagesA Novel Magnetic Gear For High Speed Motor System: Kohei Aiso, Kan Akatsu, Yasuaki AoyamabnbaNo ratings yet
- Planetary GearDocument10 pagesPlanetary Gearraaspoy2007No ratings yet
- TruptiDocument7 pagesTruptidebanshushekharNo ratings yet
- Analyzing The Dynamic Interaction Between Unbalance and Crack Responses in A Jeffcott Rotor Supported by Foil Bearings - A Numerical StudyDocument10 pagesAnalyzing The Dynamic Interaction Between Unbalance and Crack Responses in A Jeffcott Rotor Supported by Foil Bearings - A Numerical StudyKarthikNo ratings yet
- 3.2009 Fujimoto T-IEDocument9 pages3.2009 Fujimoto T-IEJavier0% (1)
- Huang 2021 J. Phys. Conf. Ser. 1815 012042Document7 pagesHuang 2021 J. Phys. Conf. Ser. 1815 012042Dhanraj RajaramanNo ratings yet
- The Stability and Control of Motorcycles Sharp1971Document14 pagesThe Stability and Control of Motorcycles Sharp1971renoir0079584No ratings yet
- Cheng Et Al 2019 Rotor Dynamic Experimental Investigation of An Ultra High Speed Permanent Magnet Synchronous MotorDocument11 pagesCheng Et Al 2019 Rotor Dynamic Experimental Investigation of An Ultra High Speed Permanent Magnet Synchronous MotorSRUSTI PRIYADARSHININo ratings yet
- Fast Algorithm Estimating The Jeffcott Cracked Rotor Dynamics and Stiffness VariationDocument10 pagesFast Algorithm Estimating The Jeffcott Cracked Rotor Dynamics and Stiffness VariationgomezNo ratings yet
- Wind Dfig Paper PDFDocument10 pagesWind Dfig Paper PDFShraddha VardikarNo ratings yet
- Design of Transmission HousingDocument7 pagesDesign of Transmission HousingDiego LobatoNo ratings yet
- Comparative Study On Dynamic Characteristics of Two-Stage Gear System With Gear and Shaft Cracks Considering The Shaft FlexibilityDocument19 pagesComparative Study On Dynamic Characteristics of Two-Stage Gear System With Gear and Shaft Cracks Considering The Shaft FlexibilityPhu, Le HuuNo ratings yet
- Rotor Stability PresentationDocument26 pagesRotor Stability PresentationHappy SinkalaNo ratings yet
- Finite Element Approach For Study of Torsional and Bending Effect On Four Cylinder Engine CrankshaftsDocument13 pagesFinite Element Approach For Study of Torsional and Bending Effect On Four Cylinder Engine CrankshaftsMaiman LatoNo ratings yet
- Ansys ApdlDocument9 pagesAnsys Apdlgautham_93No ratings yet
- Modeling of Hysteresis Motor: Aishwarya Dhanagare, A.G.ThosarDocument8 pagesModeling of Hysteresis Motor: Aishwarya Dhanagare, A.G.ThosarLoli SyNo ratings yet
- Performance Improvement of Magnetic Gear and Efficiency Comparison With Conventional Mechanical GearDocument4 pagesPerformance Improvement of Magnetic Gear and Efficiency Comparison With Conventional Mechanical GearnevesunipampaNo ratings yet
- Vibration Analysis Including Stator Rotor Hou 2018 Journal of Electrical SDocument14 pagesVibration Analysis Including Stator Rotor Hou 2018 Journal of Electrical SSathish KumarNo ratings yet
- Wide Range Drive of Hybrid Stepping Motor With Flux-Weakening ControlDocument7 pagesWide Range Drive of Hybrid Stepping Motor With Flux-Weakening ControlTrần Tấn LộcNo ratings yet
- 3 BearingDocument8 pages3 Bearingjamila mahmoudNo ratings yet
- 1967-Sternlicht-Rotor StabilityDocument18 pages1967-Sternlicht-Rotor StabilityAlex CooperNo ratings yet
- Permanent Magnet Bias, Homopolar Magnetic Bearings For A 130 KW-HR Composite FlywheelDocument8 pagesPermanent Magnet Bias, Homopolar Magnetic Bearings For A 130 KW-HR Composite FlywheelAnonymous f3oWRCJNo ratings yet
- A Design of Rotor Bar InclinationDocument4 pagesA Design of Rotor Bar InclinationAnonymous Gm1md6kbNo ratings yet
- 2021 Effect of Manufacturing Tolerances On Cogging Torque of Spoke-Type Permanent Magnet Synchronous MotorDocument6 pages2021 Effect of Manufacturing Tolerances On Cogging Torque of Spoke-Type Permanent Magnet Synchronous MotorMuhammad HumzaNo ratings yet
- Free Vibration of A Functionally Graded Rotating Timoshenko Beam Using FEM PDFDocument14 pagesFree Vibration of A Functionally Graded Rotating Timoshenko Beam Using FEM PDFtengzcNo ratings yet
- Control Moment GyroscopeDocument6 pagesControl Moment GyroscopeVed NarsekarNo ratings yet
- Factor Analysis of Torque Ripple Reduction in Synchronous Reluctance Motors Derived From Topology OptimizationDocument8 pagesFactor Analysis of Torque Ripple Reduction in Synchronous Reluctance Motors Derived From Topology OptimizationRaphaelNo ratings yet
- Mi 200224Document8 pagesMi 200224Văn Tuấn NguyễnNo ratings yet
- Energies 11 03053 v2Document14 pagesEnergies 11 03053 v2BENI PURNOMONo ratings yet
- Research Article: Application of Spherical Magnetic Bearing in Magnetically Suspended Control and Sensitive GyroDocument11 pagesResearch Article: Application of Spherical Magnetic Bearing in Magnetically Suspended Control and Sensitive GyroM.ShNo ratings yet
- Rotors: Modal Testing ofDocument35 pagesRotors: Modal Testing ofJolito RamosNo ratings yet
- Rotor IntroductionDocument3 pagesRotor IntroductionJohn ByersNo ratings yet
- Investigation of A Combined Electro Magnetic Structure of Bearingless Motor and Magnetic GearDocument7 pagesInvestigation of A Combined Electro Magnetic Structure of Bearingless Motor and Magnetic GearnevesunipampaNo ratings yet
- iNaCoMM 2019 Paper 82Document7 pagesiNaCoMM 2019 Paper 82pavanmisra1No ratings yet
- Numerical Simulation and Experimental Testing of DDocument14 pagesNumerical Simulation and Experimental Testing of Dali salekifardNo ratings yet
- Simulation of Amb Supported Rotor During Drop On Retainer BearingsDocument32 pagesSimulation of Amb Supported Rotor During Drop On Retainer BearingsankitsarvaiyaNo ratings yet
- Mechanical Systems and Signal Processing: Pengfei Wang, Hongyang Xu, Hui Ma, Hongzheng Han, Yang YangDocument31 pagesMechanical Systems and Signal Processing: Pengfei Wang, Hongyang Xu, Hui Ma, Hongzheng Han, Yang YangVivek ParmarNo ratings yet
- A Direct Torque Controller For Permanent Magnet Synchronous Motor DrivesDocument6 pagesA Direct Torque Controller For Permanent Magnet Synchronous Motor DrivesGo GoNo ratings yet
- Development of Integrated Control of Electronic Stability ControlDocument6 pagesDevelopment of Integrated Control of Electronic Stability ControlSantiago Puma Puma AraujoNo ratings yet
- Construction Operation and Basic Control of VR, PM and Hybrid Type Stepper MotorsDocument5 pagesConstruction Operation and Basic Control of VR, PM and Hybrid Type Stepper MotorsSew KariyawasamNo ratings yet
- 2013-Eling - Dyn of Rotors On Hydrodynamic Bearings-COMSOL ConfDocument7 pages2013-Eling - Dyn of Rotors On Hydrodynamic Bearings-COMSOL ConfAlex CooperNo ratings yet
- JOAPE - Volume 2 - Issue 2 - Pages 121-128Document8 pagesJOAPE - Volume 2 - Issue 2 - Pages 121-128uma.bhuvanNo ratings yet
- Lecture 11 Energy Transport With Energy DissipationDocument16 pagesLecture 11 Energy Transport With Energy DissipationFarahin Burhan100% (1)
- An Introduction To The Density Matrix Renormalization Group Ansatz in Quantum ChemistryDocument18 pagesAn Introduction To The Density Matrix Renormalization Group Ansatz in Quantum ChemistryAbhijit SamantaNo ratings yet
- Understanding Photometric ReportsDocument4 pagesUnderstanding Photometric ReportsNaxNo ratings yet
- MEC4801 AssignmentDocument5 pagesMEC4801 AssignmentVincent WongNo ratings yet
- Impulse and Momentu1Document37 pagesImpulse and Momentu1Novalyn Reyes PblicoNo ratings yet
- Enviro Product Catalog VCC 2Document1 pageEnviro Product Catalog VCC 2caigaNo ratings yet
- DRR Lesson 3 Earthquake HazardDocument43 pagesDRR Lesson 3 Earthquake HazardErnest John MarquezNo ratings yet
- 2146E2746E3346E4047E Maintenance ManualDocument94 pages2146E2746E3346E4047E Maintenance ManualCarlos Andres Espinel HenaoNo ratings yet
- Second Sem Midterm DiagnosticDocument5 pagesSecond Sem Midterm DiagnosticChristoPher TorioNo ratings yet
- Photogrammetry: Definitions Aerial Photogrammetry Terrestrial PhotogrammetryDocument46 pagesPhotogrammetry: Definitions Aerial Photogrammetry Terrestrial Photogrammetrypaul macharia100% (1)
- Formulation Development and Evaluation of Mouth Dissolving Tablet of ThiocolchicosideDocument18 pagesFormulation Development and Evaluation of Mouth Dissolving Tablet of ThiocolchicosideEditor IJTSRDNo ratings yet
- Hydraulic and Pneumatic Power SystemsDocument52 pagesHydraulic and Pneumatic Power SystemsPokemon GoNo ratings yet
- FORM U-5 MANUFACTURERS DATA REPORT SUPPLEMENTARY SHEET SHELL AND TUBE HEAT EXCHANGERS 2021 EditionDocument1 pageFORM U-5 MANUFACTURERS DATA REPORT SUPPLEMENTARY SHEET SHELL AND TUBE HEAT EXCHANGERS 2021 EditionjuliocarroregueiroNo ratings yet
- Calculation of Timur PermeabilityDocument3 pagesCalculation of Timur PermeabilitybhupenderNo ratings yet
- SoP Danish PDFDocument2 pagesSoP Danish PDFMohdMustaqeemNo ratings yet
- Tutorial 9. Using The Mixing Plane Model: PreparationDocument30 pagesTutorial 9. Using The Mixing Plane Model: PreparationMisael RamirezNo ratings yet
- PF V6fi-60 V6fo-60Document5 pagesPF V6fi-60 V6fo-60David MinerNo ratings yet
- Heat QuantitiyDocument32 pagesHeat QuantitiyMagued MikhaelNo ratings yet
- Major & Minor Energy LossDocument5 pagesMajor & Minor Energy LossHaris jugnoo0% (1)
- Simulation of Particle Flows and Breakage in Crushers Using DEM Part 1 - Compression CrushersDocument20 pagesSimulation of Particle Flows and Breakage in Crushers Using DEM Part 1 - Compression Crushersthe requiem LastNo ratings yet
- EK 1aDocument16 pagesEK 1azüheyir nuralNo ratings yet
- BRE Digest 406 - Wind Actions On Buildings and StructuresDocument9 pagesBRE Digest 406 - Wind Actions On Buildings and Structuresanil97232No ratings yet
- NEET UG 2020 Sample Paper Mock Test Answer Key Solution NurtureDocument8 pagesNEET UG 2020 Sample Paper Mock Test Answer Key Solution Nurturesharesth sharmaNo ratings yet
- Phys10.02 Expt5 - Conservation of EnergyDocument7 pagesPhys10.02 Expt5 - Conservation of EnergyKenneth BagayasNo ratings yet
- Sub Marc WeldDocument4 pagesSub Marc WeldzhangjlNo ratings yet
- STPM 2023 SEM 2 Mock AnsDocument2 pagesSTPM 2023 SEM 2 Mock AnsHannah KaienNo ratings yet