Download as pdf or txt
You might also like
- The Varieties of Sensory Experience A Sourcebook in The Anthropology of The SensesDocument350 pagesThe Varieties of Sensory Experience A Sourcebook in The Anthropology of The SensesRocío Zaldumbide100% (1)
- BMW Inpa English User Guide PDFDocument74 pagesBMW Inpa English User Guide PDFTimSmithNo ratings yet
- Solutions To Problems in Merzbacher, Quantum Mechanics, Third EditionDocument12 pagesSolutions To Problems in Merzbacher, Quantum Mechanics, Third EditionHyunki Sim0% (1)
- GraphDocument10 pagesGraphAhmad AkhtarNo ratings yet
- Unit-V GraphsDocument24 pagesUnit-V Graphssahana sidNo ratings yet
- DS IV Unit NotesDocument29 pagesDS IV Unit NotesAlagandula KalyaniNo ratings yet
- DSC Unit-4Document30 pagesDSC Unit-4Bandi SirishaNo ratings yet
- GraphDocument18 pagesGraphpreritsinghcr7No ratings yet
- Unit 5 - Graphs Introduction To GraphsDocument15 pagesUnit 5 - Graphs Introduction To GraphsVijay kumarNo ratings yet
- Graphs in Data StructuresDocument28 pagesGraphs in Data StructuresSHABNAM SNo ratings yet
- Adsa 3-UnitDocument73 pagesAdsa 3-Unitsharmilahema33No ratings yet
- Graph & Graph Models+123Document26 pagesGraph & Graph Models+123Big BossNo ratings yet
- The Graph ADT Introduction Graph Representation Elementary Graph Operations BFS, DFSDocument14 pagesThe Graph ADT Introduction Graph Representation Elementary Graph Operations BFS, DFSRekha SreeNo ratings yet
- DS-unit IVDocument32 pagesDS-unit IVashleyyychan06No ratings yet
- Dsa - GraphDocument65 pagesDsa - Graphvu4f2223087No ratings yet
- Graph Introduction, TypesDocument25 pagesGraph Introduction, TypesDevotional SongsNo ratings yet
- AlgorithmDocument30 pagesAlgorithmmnazareti mystryNo ratings yet
- DS NotesDocument211 pagesDS Notesvaishnavirai273No ratings yet
- GraphDocument35 pagesGraphsayanpal854No ratings yet
- Chapter 6 - DSDocument67 pagesChapter 6 - DSpruthvirajdesai204No ratings yet
- Graph (Graph DS, BFS, DFS, Prim's, Krushkal's) PDFDocument60 pagesGraph (Graph DS, BFS, DFS, Prim's, Krushkal's) PDFShivansh GoelNo ratings yet
- GraphsDocument13 pagesGraphsAbdul RehmanNo ratings yet
- Trees and Graphs3Document13 pagesTrees and Graphs3Ria thanickaNo ratings yet
- Chapter 1-Course Graph AlgorithmsDocument64 pagesChapter 1-Course Graph AlgorithmsHfsssNo ratings yet
- Graphs DSDocument11 pagesGraphs DSfocaba4283No ratings yet
- Graphs, Hashing, Sorting, Files: Definitions: Graph, Vertices, EdgesDocument24 pagesGraphs, Hashing, Sorting, Files: Definitions: Graph, Vertices, EdgesMohan BiradarNo ratings yet
- Ds Unit 5 (Graphs)Document35 pagesDs Unit 5 (Graphs)ashishmohan625No ratings yet
- GraphDocument10 pagesGraph350 Aditya JadhavNo ratings yet
- Aph TheoryDocument46 pagesAph Theorypavan sai tejaNo ratings yet
- Unit Iii GraphsDocument32 pagesUnit Iii Graphsrno68792No ratings yet
- Graphs: Presented By, M.Sangeetha, Ap/Cse, Kongu Engineering CollegeDocument61 pagesGraphs: Presented By, M.Sangeetha, Ap/Cse, Kongu Engineering CollegesangeethaNo ratings yet
- Data Structure UNIT VDocument20 pagesData Structure UNIT VMogili sivaNo ratings yet
- Unit 5Document36 pagesUnit 5Sai KumarNo ratings yet
- Unit 4Document34 pagesUnit 4ranjandas2522No ratings yet
- Graph:: Unit-V GraphsDocument26 pagesGraph:: Unit-V GraphsRekha SreeNo ratings yet
- Appendix-Glossary of Graph TheoryDocument16 pagesAppendix-Glossary of Graph TheorymarsNo ratings yet
- Graph Data StructureDocument13 pagesGraph Data Structureelvisnjoroge31No ratings yet
- UNIT-V-DSDocument8 pagesUNIT-V-DSv214772No ratings yet
- Graphs- Unit 3Document15 pagesGraphs- Unit 3Jesica D'cruzNo ratings yet
- Graphs1 130126021226 Phpapp01Document32 pagesGraphs1 130126021226 Phpapp01AliImranNo ratings yet
- Data Structures - MOD VDocument42 pagesData Structures - MOD VManikandan SriramNo ratings yet
- Representation of Graphs: Trivial GraphDocument23 pagesRepresentation of Graphs: Trivial GraphMantri YashodaNo ratings yet
- Unit5 GraphsDocument40 pagesUnit5 GraphsInnovation SRINo ratings yet
- CPE133-Lecture Notes - L7-451-Graphs and SearchDocument36 pagesCPE133-Lecture Notes - L7-451-Graphs and SearchAhmed SaidNo ratings yet
- DSA5Document33 pagesDSA5amitbpattarNo ratings yet
- GraphsDocument3 pagesGraphsRajesh KumarNo ratings yet
- DATA STRUCTURES AND ALGORITHMS - Unit 5Document35 pagesDATA STRUCTURES AND ALGORITHMS - Unit 5BOMMA SRI MUKHINo ratings yet
- Lecture 01Document26 pagesLecture 01Waqar RoyNo ratings yet
- Design Analysis Algorithm 4Document3 pagesDesign Analysis Algorithm 4Mohammad Faizan AwanNo ratings yet
- CSCE 3110 Data Structures & Algorithm Analysis: Rada Mihalcea Graphs (I) Reading: Chap.9, WeissDocument34 pagesCSCE 3110 Data Structures & Algorithm Analysis: Rada Mihalcea Graphs (I) Reading: Chap.9, WeissSreekesh RavindranNo ratings yet
- TERminatorDocument7 pagesTERminatorJames Roi Dela CruzNo ratings yet
- HS BasicGraphTerminologyDocument6 pagesHS BasicGraphTerminologyAnuragGuptaNo ratings yet
- Unit Iv Graphs: 1. Directed Graph or DigraphDocument10 pagesUnit Iv Graphs: 1. Directed Graph or DigraphAnonymous V7P5fNQINo ratings yet
- I B.SC CS DS Unit IvDocument15 pagesI B.SC CS DS Unit Ivarkaruns_858818340No ratings yet
- Graphs in ds2 Bca 4Document20 pagesGraphs in ds2 Bca 4mimanshas28No ratings yet
- Unit Iv Non Linear Data Structures - GraphsDocument29 pagesUnit Iv Non Linear Data Structures - GraphsRekhasreeGoneNo ratings yet
- DM UNIT4 NotesDocument8 pagesDM UNIT4 NotesfhhNo ratings yet
- Unit 2 AlgorithmDocument39 pagesUnit 2 AlgorithmSubisha M SudhakarNo ratings yet
- Graph Data Structure-NotesDocument15 pagesGraph Data Structure-Notesapurvamehta100% (1)
- Data Structures and Algorithms (BCO 002A) UNIT-5Document64 pagesData Structures and Algorithms (BCO 002A) UNIT-5Priyansh DuveyNo ratings yet
- Unit 05 DSDocument27 pagesUnit 05 DSPavaniNo ratings yet
- DS Module 3 GRAPHDocument17 pagesDS Module 3 GRAPHKiki KarthikNo ratings yet
- Writer's Notebook Seed InstructionsDocument3 pagesWriter's Notebook Seed Instructionsfrankie.guidaNo ratings yet
- Lesson 5Document13 pagesLesson 5Iosifina100% (1)
- Samira SaidDocument5 pagesSamira SaidtrannyrocksNo ratings yet
- Modul Praktikum B.inggrisDocument43 pagesModul Praktikum B.inggrisGerishelaWimanda100% (5)
- 1 Thessalonians 5Document3 pages1 Thessalonians 5Merciditha EllaNo ratings yet
- Intermediate Module - 3rdDocument235 pagesIntermediate Module - 3rdJohn KopeyNo ratings yet
- Manual E Textos de Apoio: 25 de Março A 6 de MaioDocument32 pagesManual E Textos de Apoio: 25 de Março A 6 de MaioRicardoCostaNo ratings yet
- Nickname - WikipediaDocument8 pagesNickname - WikipediaLorena Palha DiasNo ratings yet
- Programming The Internet of ThingsDocument86 pagesProgramming The Internet of ThingsKhairul Alam Taifur100% (1)
- Secondary Unit PlanDocument4 pagesSecondary Unit Planapi-643485262No ratings yet
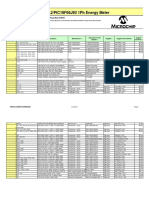
- Bill of Materials MCP6L2/PIC18F66J93 1Ph Energy MeterDocument3 pagesBill of Materials MCP6L2/PIC18F66J93 1Ph Energy Meteriskandarn_el5735No ratings yet
- The Importance of English NowadaysDocument2 pagesThe Importance of English NowadaysJohnson MukadiNo ratings yet
- Ceviche en InglesDocument3 pagesCeviche en InglesNAYC100% (1)
- Björn Raake CateringDocument2 pagesBjörn Raake CateringbjörnNo ratings yet
- 151 TP Wrting TBU SS 382Document148 pages151 TP Wrting TBU SS 382AL AMIN CLINIC FAWAZNo ratings yet
- Course Syllabus 2020 Fundamentals of Computing 1Document6 pagesCourse Syllabus 2020 Fundamentals of Computing 1Wit Excelsior PañaNo ratings yet
- Summative Test Grade 9 MathDocument3 pagesSummative Test Grade 9 MathMaricris Dizon-MiguelNo ratings yet
- Flare Calc Sheet API RP 521Document9 pagesFlare Calc Sheet API RP 521Miftahul HudaNo ratings yet
- Unit 13-The Expression of Quantity: ND NDDocument17 pagesUnit 13-The Expression of Quantity: ND NDPedroNo ratings yet
- Kolej Profesional Mara Indera MahkotaDocument41 pagesKolej Profesional Mara Indera MahkotaWan Ahmad Qayyim Wan YazmanNo ratings yet
- 3 Đề Truong-Thcs-Lomonoxop Đề Minh Họa Năm học: 2019 - 2020 I. Circle the word that contains a different sound in the underlined part. (2 pts)Document3 pages3 Đề Truong-Thcs-Lomonoxop Đề Minh Họa Năm học: 2019 - 2020 I. Circle the word that contains a different sound in the underlined part. (2 pts)phuonglgNo ratings yet
- Basic Listening Empathy and Compassion 217Document5 pagesBasic Listening Empathy and Compassion 217Purva GoyalNo ratings yet
- TIB Bwce 2.6.2 Performance Benchmarking TuningDocument85 pagesTIB Bwce 2.6.2 Performance Benchmarking Tuningnarasakuru79No ratings yet
- Wondrous Love - SATB (Lent Communion)Document11 pagesWondrous Love - SATB (Lent Communion)Kinneth Lizardo PadronesNo ratings yet
- The Lullian Art of Finding Truth A Medieval System of EnquiryDocument2 pagesThe Lullian Art of Finding Truth A Medieval System of EnquiryMisin MongNo ratings yet
- Aditya Ajit Patil 42: III Ai&DsDocument38 pagesAditya Ajit Patil 42: III Ai&DsMaithili PatilNo ratings yet
- 30 Busy Teacher's ESL Cheat Sheets Holidays PDFDocument33 pages30 Busy Teacher's ESL Cheat Sheets Holidays PDFGiovanni MosqueraNo ratings yet