Download as pdf or txt
You might also like
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 4 out of 5 stars4/5 (2)
- Government of Kerala: Income CertificateDocument1 pageGovernment of Kerala: Income CertificatethanseelnnNo ratings yet
- Maxon Explanation of Catalog Data DC Motors 2016-17Document1 pageMaxon Explanation of Catalog Data DC Motors 2016-17RatanieriNo ratings yet
- For Terminology Maxon ECX: ExplanationDocument1 pageFor Terminology Maxon ECX: ExplanationDeya OstriaNo ratings yet
- Explanation of Maxon EC Motor TerminologyDocument1 pageExplanation of Maxon EC Motor TerminologyfurkanfurkanfurkanNo ratings yet
- Maxon EC60 400wattDocument1 pageMaxon EC60 400wattElectromateNo ratings yet
- Maxon EC90 Flat 90wattDocument1 pageMaxon EC90 Flat 90wattElectromateNo ratings yet
- faulhaberDocument53 pagesfaulhaberalejo leonNo ratings yet
- Motores PDFDocument1 pageMotores PDFJorge Alejandro Barrutia BorbollaNo ratings yet
- RE50Document1 pageRE50Yhony Gamarra VargasNo ratings yet
- Maxon RE25 Precious Metal Brushes 10wattDocument1 pageMaxon RE25 Precious Metal Brushes 10wattElectromateNo ratings yet
- Maxon RE30 Graphite Brushes 60wattDocument1 pageMaxon RE30 Graphite Brushes 60wattElectromateNo ratings yet
- Maxon EC6 1.2wattDocument1 pageMaxon EC6 1.2wattElectromateNo ratings yet
- Maxon A-Max26 Precious Metal Brushes 7wattDocument1 pageMaxon A-Max26 Precious Metal Brushes 7wattElectromateNo ratings yet
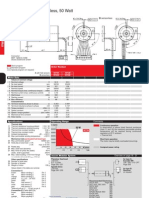
- Maxon EC-Max40 70wattDocument1 pageMaxon EC-Max40 70wattElectromateNo ratings yet
- 81 PDFDocument1 page81 PDFRatanieriNo ratings yet
- 30 MM, Graphite Brushes, 60 Watt: Order NumberDocument1 page30 MM, Graphite Brushes, 60 Watt: Order NumberRatanieriNo ratings yet
- Clarifying Current Values and Naming For Celera Motion S Ingenia DrivesDocument8 pagesClarifying Current Values and Naming For Celera Motion S Ingenia DrivesflynlowNo ratings yet
- Catalog Motor EC90Flat 323772Document1 pageCatalog Motor EC90Flat 323772Lucas SuplinoNo ratings yet
- Evs27 200013Document7 pagesEvs27 200013Trần Tấn LộcNo ratings yet
- Drive CurveDocument15 pagesDrive CurvemhcfldmewfbjcnwzjNo ratings yet
- Maxon RE50 Graphite Brushes 200wattDocument1 pageMaxon RE50 Graphite Brushes 200wattElectromateNo ratings yet
- ELE 2117 Lesson 11Document42 pagesELE 2117 Lesson 11elioNo ratings yet
- En 21 250Document1 pageEn 21 250compimagmaticNo ratings yet
- Maxon EC22 50wattDocument1 pageMaxon EC22 50wattElectromateNo ratings yet
- RE 25 25 MM, Precious Metal Brushes CLL, 10 Watt: Part NumbersDocument1 pageRE 25 25 MM, Precious Metal Brushes CLL, 10 Watt: Part NumbersWALTER ANDRES CORDOBA CACERENo ratings yet
- PMdrives Part2Document24 pagesPMdrives Part2leo232No ratings yet
- SMMA Motor GlossaryDocument11 pagesSMMA Motor GlossaryNurulHardyNo ratings yet
- Lect - 39 - 40 - Power Electronic Control of IM MotorsDocument18 pagesLect - 39 - 40 - Power Electronic Control of IM MotorsVishal MeghwarNo ratings yet
- Temperature Effects On DC Motor Performance 1 PDFDocument10 pagesTemperature Effects On DC Motor Performance 1 PDFD RajeshNo ratings yet
- Temperature Effects On DC Motor Performance 1Document10 pagesTemperature Effects On DC Motor Performance 1BabuNo ratings yet
- MAXON Brushed Motor A-Max 26, 4.5 WDocument1 pageMAXON Brushed Motor A-Max 26, 4.5 WRadu BabauNo ratings yet
- EC 40 40 MM, Brushless, 170 Watt: Part NumbersDocument1 pageEC 40 40 MM, Brushless, 170 Watt: Part NumbersfurkanfurkanfurkanNo ratings yet
- CYCLE-2:Experiment 1 Steady-State Performance of A 3-Phase Induction MotorDocument32 pagesCYCLE-2:Experiment 1 Steady-State Performance of A 3-Phase Induction MotorSumit SinghNo ratings yet
- Protecting Submersible Motors From The Effects of PWM VoltageDocument6 pagesProtecting Submersible Motors From The Effects of PWM VoltagetareqNo ratings yet
- Maxon EC-Max16 5wattDocument1 pageMaxon EC-Max16 5wattElectromateNo ratings yet
- Maxon EC-Max30 40wattDocument1 pageMaxon EC-Max30 40wattElectromateNo ratings yet
- Solid State Induction Motors DrivesDocument36 pagesSolid State Induction Motors DrivesRakesh MandalNo ratings yet
- Combustion Turbine and Combined-Cycle Power Plants: Own ofDocument16 pagesCombustion Turbine and Combined-Cycle Power Plants: Own ofasemNo ratings yet
- Generator ReactancesDocument3 pagesGenerator ReactancesLora BishopNo ratings yet
- NTN-SNR - General List - Technical Characteristics EsDocument17 pagesNTN-SNR - General List - Technical Characteristics EsDaniel EspitiaNo ratings yet
- Maxon EC-Powermax30 200wattDocument1 pageMaxon EC-Powermax30 200wattElectromateNo ratings yet
- Web Motor GlossaryDocument7 pagesWeb Motor GlossaryansabhiNo ratings yet
- Maxon EC-Max22 25wattDocument1 pageMaxon EC-Max22 25wattElectromateNo ratings yet
- En 21 242Document1 pageEn 21 242Zoltán SoósNo ratings yet
- EC 22 22 MM, Brushless, 50 Watt: Part NumbersDocument1 pageEC 22 22 MM, Brushless, 50 Watt: Part NumbersfurkanfurkanfurkanNo ratings yet
- Starting Time Calculation For Induction Motor.: Abhishek Garg, Arun Singh TomarDocument5 pagesStarting Time Calculation For Induction Motor.: Abhishek Garg, Arun Singh TomarBhavik PrajapatiNo ratings yet
- AN001-Control Design of 100-kW PMSM DriveDocument9 pagesAN001-Control Design of 100-kW PMSM DriveRudhi KurniawanNo ratings yet
- MSFO-1255: W210 Switchgear Design Department 5,000 Teu Class Container CarrierDocument31 pagesMSFO-1255: W210 Switchgear Design Department 5,000 Teu Class Container CarrierАлексей ПетренкоNo ratings yet
- ABB Technical Guide No.7 REVCDocument40 pagesABB Technical Guide No.7 REVCelectrical_1012000No ratings yet
- Maxon RE-Max17 Graphite Brushes 4.5wattDocument2 pagesMaxon RE-Max17 Graphite Brushes 4.5wattElectromateNo ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Analog Dialogue, Volume 48, Number 1: Analog Dialogue, #13From EverandAnalog Dialogue, Volume 48, Number 1: Analog Dialogue, #13Rating: 4 out of 5 stars4/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- Dynamometer: Theory and Application to Engine TestingFrom EverandDynamometer: Theory and Application to Engine TestingNo ratings yet
- Noli Me Tángere: References For The NovelDocument12 pagesNoli Me Tángere: References For The NovelJamesapostle220% (1)
- S Setting Value, C Check Value) OT Outside Tolerance (X Is Set)Document3 pagesS Setting Value, C Check Value) OT Outside Tolerance (X Is Set)Agus WijayadiNo ratings yet
- Civil Law MTDocument28 pagesCivil Law MTKaira Marie CarlosNo ratings yet
- Top of FormDocument28 pagesTop of Formsybell8No ratings yet
- Forum 5 - Canlas PDFDocument2 pagesForum 5 - Canlas PDFPauline CanlasNo ratings yet
- Wedding Program Template 13Document2 pagesWedding Program Template 13Ameyaw EffahNo ratings yet
- 30 IELTS Writing Band 8.0Document31 pages30 IELTS Writing Band 8.0Elize WillyNo ratings yet
- Project Mobilization Plan-NarrativeDocument25 pagesProject Mobilization Plan-NarrativeJoey Marasigan100% (1)
- Prasanna Resume Aug - 23Document1 pagePrasanna Resume Aug - 23vishal.singhNo ratings yet
- Lesson Plan Day 4Document2 pagesLesson Plan Day 4api-348971267No ratings yet
- ACW2491 Lecture 4 Handout SolutionS22016Document4 pagesACW2491 Lecture 4 Handout SolutionS22016林志成No ratings yet
- Common Object ModelDocument4 pagesCommon Object ModelMahesh AbnaveNo ratings yet
- PART 1: Overview of Retail Marketing TrendsDocument64 pagesPART 1: Overview of Retail Marketing TrendsRavichandran Ramanujan100% (2)
- Group 7 Selecting Channel PartnersDocument24 pagesGroup 7 Selecting Channel PartnersJillian Salipande AbulenciaNo ratings yet
- Climate Change Lesson PlanDocument2 pagesClimate Change Lesson PlanMbagnick Diop100% (1)
- Procedure Manual 101: Aircraft Covering ProcessDocument146 pagesProcedure Manual 101: Aircraft Covering ProcessJessie O.BechaydaNo ratings yet
- The Affidavit of Obligation - Filing Liens Against The Twelve Federal Reserve BanksDocument11 pagesThe Affidavit of Obligation - Filing Liens Against The Twelve Federal Reserve Banksenerchi1111100% (8)
- Petitioner vs. vs. Respondents Primo O. Orellan Jose M. KimpoDocument5 pagesPetitioner vs. vs. Respondents Primo O. Orellan Jose M. Kimpogenel marquezNo ratings yet
- To The Filipino Youth by Jose Rizal PDFDocument15 pagesTo The Filipino Youth by Jose Rizal PDFcristy japlosNo ratings yet
- Musculoskeletal QuestionsDocument4 pagesMusculoskeletal QuestionsJen Del Mundo100% (1)
- Robert Gabriel TranscriptDocument70 pagesRobert Gabriel TranscriptDaily KosNo ratings yet
- 2Q 2022 Media Briefing 6.29.22 Client Copy WMDocument28 pages2Q 2022 Media Briefing 6.29.22 Client Copy WMJohn Howard RoqueNo ratings yet
- Slide Pentaksiran Holistik - Konsep Dan AmalanDocument15 pagesSlide Pentaksiran Holistik - Konsep Dan AmalanNURFARIESYAH NAJWA BINTI NURUL HISHAMNo ratings yet
- Mythmaker's Grimoire Vol. 3 V 1.0 - 9.30.22Document30 pagesMythmaker's Grimoire Vol. 3 V 1.0 - 9.30.22BHISGB HIerfgbh iNo ratings yet
- Nomzamo The Good Wife Part 2Document5 pagesNomzamo The Good Wife Part 2prayerntandwenhleNo ratings yet
- Improper Landscapes of Desire: Alternative Routes Towards (Un) Satisfaction in The Narrative of Ena Lucía PortelaDocument10 pagesImproper Landscapes of Desire: Alternative Routes Towards (Un) Satisfaction in The Narrative of Ena Lucía PortelayunlectorNo ratings yet
- PCS GSM PicoCell Booster Updated R5 PDFDocument3 pagesPCS GSM PicoCell Booster Updated R5 PDFpandavision76No ratings yet
- Ineffective But Reasonable - Why Do European Airlines Operate Short-Haul Flights?Document9 pagesIneffective But Reasonable - Why Do European Airlines Operate Short-Haul Flights?tanvir ehsanNo ratings yet
- Historical Issues in The Book of Daniel (Review) - Thomas Gaston PDFDocument2 pagesHistorical Issues in The Book of Daniel (Review) - Thomas Gaston PDFDave MoreNo ratings yet