
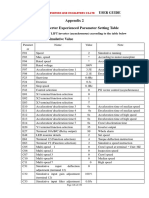
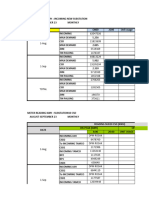
Inverter Parameter Configuration
Inverter Parameter Configuration
You might also like
- GeneralDocument50 pagesGeneralwaleedyehia100% (2)
- KT 5198aDocument5 pagesKT 5198asrinu149No ratings yet
- Makita Drill 6095DDocument12 pagesMakita Drill 6095DpapaziarNo ratings yet
- SAFTRONICSDF8PLUS AA1152 ManualDocument20 pagesSAFTRONICSDF8PLUS AA1152 ManualMarcelo CabriNo ratings yet
- CIGRE Curso HVDC - Perdas - Canelhas PDFDocument10 pagesCIGRE Curso HVDC - Perdas - Canelhas PDFcarlosrenatorcNo ratings yet
- Curso de Transmissão em Corrente Contínua: Station LossesDocument10 pagesCurso de Transmissão em Corrente Contínua: Station LossesCarlos FigueiredoNo ratings yet
- Control IC For Single-Ended and Push-Pull Switched-Mode Power Supplies (SMPS) TDA 4700 TDA 4718Document21 pagesControl IC For Single-Ended and Push-Pull Switched-Mode Power Supplies (SMPS) TDA 4700 TDA 4718Wellison RodriguesNo ratings yet
- Apolo Textil Demo EthernetIP ParametersDocument2 pagesApolo Textil Demo EthernetIP ParametersAbraham LaraNo ratings yet
- Santa Parameters VariadorDocument2 pagesSanta Parameters VariadorFernando MedinaNo ratings yet
- LM 1819Document10 pagesLM 1819Pozo Do CabaloNo ratings yet
- Tlidlc275 DDocument4 pagesTlidlc275 DHalit YalçınkayaNo ratings yet
- Softstart Digistart D3 Slip Ring Motor Control Application NoteDocument3 pagesSoftstart Digistart D3 Slip Ring Motor Control Application NoteIsaac AwudiNo ratings yet
- (K-30) Datasheet - Stafford ValvesDocument2 pages(K-30) Datasheet - Stafford ValvesPRASANTH PRASANTHNo ratings yet
- 1 Design A Protection System Using IDMT Relay To Protect System For Given Fault Currents & Plot The Operating Time Characteristics of The Relay UsedDocument6 pages1 Design A Protection System Using IDMT Relay To Protect System For Given Fault Currents & Plot The Operating Time Characteristics of The Relay UsedMR. SUSHIL BARAPATRENo ratings yet
- Amplificador de Audio Samsung MAX DC650Document9 pagesAmplificador de Audio Samsung MAX DC650Enya Andrea Ribba HernandezNo ratings yet
- Variable Frequency Drive (VFD)Document26 pagesVariable Frequency Drive (VFD)Emma Hailey100% (1)
- Schneider Electric - Altivar-340-Machine-Variable-Frequency-Drive-VFD - ATV340U07N4Document18 pagesSchneider Electric - Altivar-340-Machine-Variable-Frequency-Drive-VFD - ATV340U07N4keglobalNo ratings yet
- Linear Servomotor General Instructions: Serial Converter Unit (Model: JZDP-¡00¡-¡¡¡-E)Document8 pagesLinear Servomotor General Instructions: Serial Converter Unit (Model: JZDP-¡00¡-¡¡¡-E)Edwin Aguila CerónNo ratings yet
- EM-1 LabDocument49 pagesEM-1 LabApoorvNo ratings yet
- Data Sheet: Induction Motor Champion Series Motor Type: 1SE0 083-6NA70 SDocument3 pagesData Sheet: Induction Motor Champion Series Motor Type: 1SE0 083-6NA70 SK. RAJA SEKARNo ratings yet
- 78 Fuji SanyoDocument4 pages78 Fuji SanyoBAAAK100% (2)
- 3615 FBDocument32 pages3615 FBJhoaamMarulandaNo ratings yet
- 600 W Half-Bridge LLC Evaluation Board: EVAL - 600W - LLC - 12V - C7 - D Digital & AnalogDocument26 pages600 W Half-Bridge LLC Evaluation Board: EVAL - 600W - LLC - 12V - C7 - D Digital & Analogmaxplanck67No ratings yet
- SA12A90 - F10 Data Sheet On-OffDocument1 pageSA12A90 - F10 Data Sheet On-Offanbarasan100% (1)
- Step 1: Let's Look at A Typical Motor: Stator Cooling FanDocument17 pagesStep 1: Let's Look at A Typical Motor: Stator Cooling FanrodrigomessiasNo ratings yet
- Datasheet Turbina BB 89 AC 145 MM 1 Stage High FlowDocument1 pageDatasheet Turbina BB 89 AC 145 MM 1 Stage High FlowAntonio Abel Cantarell GarciaNo ratings yet
- Model 5250-2 Power SupplyDocument6 pagesModel 5250-2 Power Supplyefowners RDNo ratings yet
- Altivar 32 - ATV32HU15M2Document12 pagesAltivar 32 - ATV32HU15M2Jerson GalindoNo ratings yet
- Mesa Motion ControllerDocument2 pagesMesa Motion ControllerArvinder SinghNo ratings yet
- P1000 Industrial Fan and Pump Drive: 240V Class: To 175 HP 480V Class: 1 To 1000 HP 600V Class: 1 To 250 HPDocument2 pagesP1000 Industrial Fan and Pump Drive: 240V Class: To 175 HP 480V Class: 1 To 1000 HP 600V Class: 1 To 250 HPlordsethdarknessNo ratings yet
- MEGA Servo Setup Procedure For Driving PMS Motor: Application Note AN-MEGA-0016-v105ENDocument7 pagesMEGA Servo Setup Procedure For Driving PMS Motor: Application Note AN-MEGA-0016-v105ENhziarabNo ratings yet
- Abb PID-4Document1 pageAbb PID-4Mate Polegubić100% (1)
- Synchronous Rectifier Driver: Description ApplicationsDocument7 pagesSynchronous Rectifier Driver: Description ApplicationsJorge BlomdahlNo ratings yet
- Ic5 Urun Katalogu CatalogDocument20 pagesIc5 Urun Katalogu Catalogatakan kurtcaNo ratings yet
- Variable Speed DriveDocument19 pagesVariable Speed Drivemonitoring dplNo ratings yet
- Dynadrive: Information Manual SDFP (S) 1525-17Document15 pagesDynadrive: Information Manual SDFP (S) 1525-17Doug WilsonNo ratings yet
- 431CSL6206T60Document2 pages431CSL6206T60Igor CanabarroNo ratings yet
- 09.1 PLC - Technical HandbookDocument30 pages09.1 PLC - Technical HandbookSandoval Ramos Eddy100% (1)
- LM629 Salida PWMDocument25 pagesLM629 Salida PWMLuis VarelaNo ratings yet
- 215S6IE2Document3 pages215S6IE2Mahammad nadafNo ratings yet
- Alternator Data Sheet Allied Generator.Document14 pagesAlternator Data Sheet Allied Generator.muhammad nomanNo ratings yet
- Meter Configuration Report For MW-1708A338-02 - INACAP - 16!05!2018Document36 pagesMeter Configuration Report For MW-1708A338-02 - INACAP - 16!05!2018LinkisNo ratings yet
- Modbus Map VLT - R0Document8 pagesModbus Map VLT - R0gallegos70No ratings yet
- Calculating Size of Transformer and Voltage Drop Due To Starting of Large Size MotorDocument8 pagesCalculating Size of Transformer and Voltage Drop Due To Starting of Large Size MotorgebreNo ratings yet
- Protection Coordination Report: Siemens India LTDDocument25 pagesProtection Coordination Report: Siemens India LTDramesh cuppuNo ratings yet
- BD7907FS 6-Channel Combo Driver ICDocument3 pagesBD7907FS 6-Channel Combo Driver ICJános Pál HofferNo ratings yet
- Altivar 32 Variable Frequency Drive VFD - ATV32H075N4Document4 pagesAltivar 32 Variable Frequency Drive VFD - ATV32H075N4sandeep naikNo ratings yet
- Set-Range Actual Settings Remarks List of Parameters Code DiscriptionDocument1 pageSet-Range Actual Settings Remarks List of Parameters Code DiscriptionVenkitesh PGNo ratings yet
- Comparison ResultsDocument9 pagesComparison ResultsSaid HajjamiNo ratings yet
- Controlador de Transmision 1Document3 pagesControlador de Transmision 1JOEL APONTE ORTIZNo ratings yet
- EPS-BS User ManualDocument8 pagesEPS-BS User ManualFeras AljaiousiNo ratings yet
- CNC TB6560 3 Axis Stepper Motor ControllerDocument18 pagesCNC TB6560 3 Axis Stepper Motor ControllerNaldo Pellizzer100% (1)
- For Applications From 0.25 To 5 HP, The MD60 Is A Simple AC Microdrive That Can Be Panel Mounted As Well As Wall or Machine MountedDocument6 pagesFor Applications From 0.25 To 5 HP, The MD60 Is A Simple AC Microdrive That Can Be Panel Mounted As Well As Wall or Machine MountedYoandri JoseNo ratings yet
- Schneider Electric - Altivar-Process-ATV600 - ATV630C22N4Document17 pagesSchneider Electric - Altivar-Process-ATV600 - ATV630C22N4narminaNo ratings yet
- Set-Range Actual Settings Remarks List of Parameters Code DiscriptionDocument1 pageSet-Range Actual Settings Remarks List of Parameters Code DiscriptionVenkitesh PGNo ratings yet
- 2015 Engr Savings PDFDocument47 pages2015 Engr Savings PDFNiket MankadNo ratings yet
- Wire Ferules Description Fuji Fuji Name Digital Input Analog InputDocument1 pageWire Ferules Description Fuji Fuji Name Digital Input Analog InputMohammed SajidNo ratings yet
- Adobe Scan 17-Oct-2023Document5 pagesAdobe Scan 17-Oct-2023mehra familyNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- High Voltage Direct Current Transmission: Converters, Systems and DC GridsFrom EverandHigh Voltage Direct Current Transmission: Converters, Systems and DC GridsNo ratings yet
- Standard of Operation On MotorDocument1 pageStandard of Operation On Motorhaiqal ghaniNo ratings yet
- ElectricalcostCSD (Autosaved) - 7Document2 pagesElectricalcostCSD (Autosaved) - 7haiqal ghaniNo ratings yet
- ShaftsealpumpDocument1 pageShaftsealpumphaiqal ghaniNo ratings yet
- List of CableDocument1 pageList of Cablehaiqal ghaniNo ratings yet
- Power System Supply in Institut Kanser NegaraDocument21 pagesPower System Supply in Institut Kanser Negarahaiqal ghaniNo ratings yet
- Voltage DropDocument45 pagesVoltage Drophaiqal ghaniNo ratings yet
- Monthly Meter Reading August-September 23Document8 pagesMonthly Meter Reading August-September 23haiqal ghaniNo ratings yet
- Sodapdf MergedDocument2 pagesSodapdf Mergedhaiqal ghaniNo ratings yet
- Cables: Aerial BundledDocument5 pagesCables: Aerial Bundledhaiqal ghaniNo ratings yet
- Dell 23 Monitor P2319H Data SheetDocument4 pagesDell 23 Monitor P2319H Data Sheethaiqal ghaniNo ratings yet
- PVREA Transformer Impedance Data - 2023 PDFDocument1 pagePVREA Transformer Impedance Data - 2023 PDFhaiqal ghaniNo ratings yet
- Electriccarchargereportmar2019 0 PDFDocument7 pagesElectriccarchargereportmar2019 0 PDFhaiqal ghaniNo ratings yet
- Industrial Training AzamDocument12 pagesIndustrial Training Azamhaiqal ghaniNo ratings yet
- Report LIDocument76 pagesReport LIhaiqal ghaniNo ratings yet
- Pulsar Evolution 2200-3000 - Installation and User Manual - Multi LangDocument172 pagesPulsar Evolution 2200-3000 - Installation and User Manual - Multi Langenes051100% (1)
- Medidores de Resistencia en Tierra Telurometros Digitales DT 5300 Cem Manual InglesDocument22 pagesMedidores de Resistencia en Tierra Telurometros Digitales DT 5300 Cem Manual Inglesjosemartin24100% (1)
- Operation Manual - Secondary Injection Set - RFD 200 S3Document27 pagesOperation Manual - Secondary Injection Set - RFD 200 S3Sultan Uddin KhanNo ratings yet
- 4.0 - NEC and PV Rev 4Document77 pages4.0 - NEC and PV Rev 4Nels OdrajafNo ratings yet
- O-4 Sensor DwyerDocument1 pageO-4 Sensor DwyernhungtruongNo ratings yet
- SCHNEIDER Protection Guide 2008Document76 pagesSCHNEIDER Protection Guide 2008Snejana Vasileva100% (1)
- Digital AutomationsDocument29 pagesDigital AutomationsBeltazor HellboyNo ratings yet
- Homework Answers For ELET 3402 Chapter 4Document5 pagesHomework Answers For ELET 3402 Chapter 4biatris pNo ratings yet
- UDC3200 Universal Digital Controller Product Manual: 51-52-25-119 April 2008Document242 pagesUDC3200 Universal Digital Controller Product Manual: 51-52-25-119 April 2008darkomega21No ratings yet
- Plasma Arc MachiningDocument18 pagesPlasma Arc MachiningStephen WeiNo ratings yet
- Plecs ManualDocument738 pagesPlecs ManualKhanh Hung NguyenNo ratings yet
- Datasheet Demo Circuit 1894B Con LTC6804-1Document16 pagesDatasheet Demo Circuit 1894B Con LTC6804-1David Y Marcos Alcaraz MartinezNo ratings yet
- Unit I Conducting Materials - Simple FormDocument21 pagesUnit I Conducting Materials - Simple FormsmartkayelNo ratings yet
- R18 B.Tech. EEE Syllabus Jntu HyderabadDocument2 pagesR18 B.Tech. EEE Syllabus Jntu HyderabadUpender Rao SunkishalaNo ratings yet
- Wide Damping Region For LCL Type Grid-Connected Inverter With An Improved Capacitor-Current-Feedback MethodDocument13 pagesWide Damping Region For LCL Type Grid-Connected Inverter With An Improved Capacitor-Current-Feedback MethodbibiNo ratings yet
- Physics Project: Topic - Communication SystemDocument13 pagesPhysics Project: Topic - Communication SystemJeremiah Rokhum75% (4)
- Generator Protection REG670 2.1 ANSI and Injection Equipment REX060, REX061, REX062Document92 pagesGenerator Protection REG670 2.1 ANSI and Injection Equipment REX060, REX061, REX062Diego dos Santos AmaralNo ratings yet
- Key Features: P1200/Nd SeriesDocument2 pagesKey Features: P1200/Nd SeriesJuan Carlos Avila GonzalezNo ratings yet
- Tse Am Cet 18 Final Phase Last RanksDocument23 pagesTse Am Cet 18 Final Phase Last RanksVinod KumarNo ratings yet
- Manual GE L30Document676 pagesManual GE L30KoslerNo ratings yet
- EMC06 Bpdiffpair PresentationDocument22 pagesEMC06 Bpdiffpair PresentationvasikarantceNo ratings yet
- 440v 3 Phase Rotary Converter HelpDocument5 pages440v 3 Phase Rotary Converter HelpAhmed Boussoffara100% (1)
- IL-NT MRS 2.1 Reference GuideDocument123 pagesIL-NT MRS 2.1 Reference GuideAbdul_SamadNo ratings yet
- Ege Ge Egege eDocument8 pagesEge Ge Egege eAjay Kumar PrajapatiNo ratings yet
- EATON COMBINER BOX Solar Inverters and Electrical Balance of System For Commerical Utility ApplicationsDocument84 pagesEATON COMBINER BOX Solar Inverters and Electrical Balance of System For Commerical Utility Applicationspradeep.sNo ratings yet
- Exercise For Eng VDocument3 pagesExercise For Eng VNasrul HaqNo ratings yet
- Alternatoer Lvsi804s WDG 12 v9 TdsDocument8 pagesAlternatoer Lvsi804s WDG 12 v9 TdsCris_eu09No ratings yet
- sn74lvc2g240 PDFDocument19 pagessn74lvc2g240 PDFМая НайденоваNo ratings yet





































































































Download as pdf or txt
You might also like
- GeneralDocument50 pagesGeneralwaleedyehia100% (2)
- KT 5198aDocument5 pagesKT 5198asrinu149No ratings yet
- Makita Drill 6095DDocument12 pagesMakita Drill 6095DpapaziarNo ratings yet
- SAFTRONICSDF8PLUS AA1152 ManualDocument20 pagesSAFTRONICSDF8PLUS AA1152 ManualMarcelo CabriNo ratings yet
- CIGRE Curso HVDC - Perdas - Canelhas PDFDocument10 pagesCIGRE Curso HVDC - Perdas - Canelhas PDFcarlosrenatorcNo ratings yet
- Curso de Transmissão em Corrente Contínua: Station LossesDocument10 pagesCurso de Transmissão em Corrente Contínua: Station LossesCarlos FigueiredoNo ratings yet
- Control IC For Single-Ended and Push-Pull Switched-Mode Power Supplies (SMPS) TDA 4700 TDA 4718Document21 pagesControl IC For Single-Ended and Push-Pull Switched-Mode Power Supplies (SMPS) TDA 4700 TDA 4718Wellison RodriguesNo ratings yet
- Apolo Textil Demo EthernetIP ParametersDocument2 pagesApolo Textil Demo EthernetIP ParametersAbraham LaraNo ratings yet
- Santa Parameters VariadorDocument2 pagesSanta Parameters VariadorFernando MedinaNo ratings yet
- LM 1819Document10 pagesLM 1819Pozo Do CabaloNo ratings yet
- Tlidlc275 DDocument4 pagesTlidlc275 DHalit YalçınkayaNo ratings yet
- Softstart Digistart D3 Slip Ring Motor Control Application NoteDocument3 pagesSoftstart Digistart D3 Slip Ring Motor Control Application NoteIsaac AwudiNo ratings yet
- (K-30) Datasheet - Stafford ValvesDocument2 pages(K-30) Datasheet - Stafford ValvesPRASANTH PRASANTHNo ratings yet
- 1 Design A Protection System Using IDMT Relay To Protect System For Given Fault Currents & Plot The Operating Time Characteristics of The Relay UsedDocument6 pages1 Design A Protection System Using IDMT Relay To Protect System For Given Fault Currents & Plot The Operating Time Characteristics of The Relay UsedMR. SUSHIL BARAPATRENo ratings yet
- Amplificador de Audio Samsung MAX DC650Document9 pagesAmplificador de Audio Samsung MAX DC650Enya Andrea Ribba HernandezNo ratings yet
- Variable Frequency Drive (VFD)Document26 pagesVariable Frequency Drive (VFD)Emma Hailey100% (1)
- Schneider Electric - Altivar-340-Machine-Variable-Frequency-Drive-VFD - ATV340U07N4Document18 pagesSchneider Electric - Altivar-340-Machine-Variable-Frequency-Drive-VFD - ATV340U07N4keglobalNo ratings yet
- Linear Servomotor General Instructions: Serial Converter Unit (Model: JZDP-¡00¡-¡¡¡-E)Document8 pagesLinear Servomotor General Instructions: Serial Converter Unit (Model: JZDP-¡00¡-¡¡¡-E)Edwin Aguila CerónNo ratings yet
- EM-1 LabDocument49 pagesEM-1 LabApoorvNo ratings yet
- Data Sheet: Induction Motor Champion Series Motor Type: 1SE0 083-6NA70 SDocument3 pagesData Sheet: Induction Motor Champion Series Motor Type: 1SE0 083-6NA70 SK. RAJA SEKARNo ratings yet
- 78 Fuji SanyoDocument4 pages78 Fuji SanyoBAAAK100% (2)
- 3615 FBDocument32 pages3615 FBJhoaamMarulandaNo ratings yet
- 600 W Half-Bridge LLC Evaluation Board: EVAL - 600W - LLC - 12V - C7 - D Digital & AnalogDocument26 pages600 W Half-Bridge LLC Evaluation Board: EVAL - 600W - LLC - 12V - C7 - D Digital & Analogmaxplanck67No ratings yet
- SA12A90 - F10 Data Sheet On-OffDocument1 pageSA12A90 - F10 Data Sheet On-Offanbarasan100% (1)
- Step 1: Let's Look at A Typical Motor: Stator Cooling FanDocument17 pagesStep 1: Let's Look at A Typical Motor: Stator Cooling FanrodrigomessiasNo ratings yet
- Datasheet Turbina BB 89 AC 145 MM 1 Stage High FlowDocument1 pageDatasheet Turbina BB 89 AC 145 MM 1 Stage High FlowAntonio Abel Cantarell GarciaNo ratings yet
- Model 5250-2 Power SupplyDocument6 pagesModel 5250-2 Power Supplyefowners RDNo ratings yet
- Altivar 32 - ATV32HU15M2Document12 pagesAltivar 32 - ATV32HU15M2Jerson GalindoNo ratings yet
- Mesa Motion ControllerDocument2 pagesMesa Motion ControllerArvinder SinghNo ratings yet
- P1000 Industrial Fan and Pump Drive: 240V Class: To 175 HP 480V Class: 1 To 1000 HP 600V Class: 1 To 250 HPDocument2 pagesP1000 Industrial Fan and Pump Drive: 240V Class: To 175 HP 480V Class: 1 To 1000 HP 600V Class: 1 To 250 HPlordsethdarknessNo ratings yet
- MEGA Servo Setup Procedure For Driving PMS Motor: Application Note AN-MEGA-0016-v105ENDocument7 pagesMEGA Servo Setup Procedure For Driving PMS Motor: Application Note AN-MEGA-0016-v105ENhziarabNo ratings yet
- Abb PID-4Document1 pageAbb PID-4Mate Polegubić100% (1)
- Synchronous Rectifier Driver: Description ApplicationsDocument7 pagesSynchronous Rectifier Driver: Description ApplicationsJorge BlomdahlNo ratings yet
- Ic5 Urun Katalogu CatalogDocument20 pagesIc5 Urun Katalogu Catalogatakan kurtcaNo ratings yet
- Variable Speed DriveDocument19 pagesVariable Speed Drivemonitoring dplNo ratings yet
- Dynadrive: Information Manual SDFP (S) 1525-17Document15 pagesDynadrive: Information Manual SDFP (S) 1525-17Doug WilsonNo ratings yet
- 431CSL6206T60Document2 pages431CSL6206T60Igor CanabarroNo ratings yet
- 09.1 PLC - Technical HandbookDocument30 pages09.1 PLC - Technical HandbookSandoval Ramos Eddy100% (1)
- LM629 Salida PWMDocument25 pagesLM629 Salida PWMLuis VarelaNo ratings yet
- 215S6IE2Document3 pages215S6IE2Mahammad nadafNo ratings yet
- Alternator Data Sheet Allied Generator.Document14 pagesAlternator Data Sheet Allied Generator.muhammad nomanNo ratings yet
- Meter Configuration Report For MW-1708A338-02 - INACAP - 16!05!2018Document36 pagesMeter Configuration Report For MW-1708A338-02 - INACAP - 16!05!2018LinkisNo ratings yet
- Modbus Map VLT - R0Document8 pagesModbus Map VLT - R0gallegos70No ratings yet
- Calculating Size of Transformer and Voltage Drop Due To Starting of Large Size MotorDocument8 pagesCalculating Size of Transformer and Voltage Drop Due To Starting of Large Size MotorgebreNo ratings yet
- Protection Coordination Report: Siemens India LTDDocument25 pagesProtection Coordination Report: Siemens India LTDramesh cuppuNo ratings yet
- BD7907FS 6-Channel Combo Driver ICDocument3 pagesBD7907FS 6-Channel Combo Driver ICJános Pál HofferNo ratings yet
- Altivar 32 Variable Frequency Drive VFD - ATV32H075N4Document4 pagesAltivar 32 Variable Frequency Drive VFD - ATV32H075N4sandeep naikNo ratings yet
- Set-Range Actual Settings Remarks List of Parameters Code DiscriptionDocument1 pageSet-Range Actual Settings Remarks List of Parameters Code DiscriptionVenkitesh PGNo ratings yet
- Comparison ResultsDocument9 pagesComparison ResultsSaid HajjamiNo ratings yet
- Controlador de Transmision 1Document3 pagesControlador de Transmision 1JOEL APONTE ORTIZNo ratings yet
- EPS-BS User ManualDocument8 pagesEPS-BS User ManualFeras AljaiousiNo ratings yet
- CNC TB6560 3 Axis Stepper Motor ControllerDocument18 pagesCNC TB6560 3 Axis Stepper Motor ControllerNaldo Pellizzer100% (1)
- For Applications From 0.25 To 5 HP, The MD60 Is A Simple AC Microdrive That Can Be Panel Mounted As Well As Wall or Machine MountedDocument6 pagesFor Applications From 0.25 To 5 HP, The MD60 Is A Simple AC Microdrive That Can Be Panel Mounted As Well As Wall or Machine MountedYoandri JoseNo ratings yet
- Schneider Electric - Altivar-Process-ATV600 - ATV630C22N4Document17 pagesSchneider Electric - Altivar-Process-ATV600 - ATV630C22N4narminaNo ratings yet
- Set-Range Actual Settings Remarks List of Parameters Code DiscriptionDocument1 pageSet-Range Actual Settings Remarks List of Parameters Code DiscriptionVenkitesh PGNo ratings yet
- 2015 Engr Savings PDFDocument47 pages2015 Engr Savings PDFNiket MankadNo ratings yet
- Wire Ferules Description Fuji Fuji Name Digital Input Analog InputDocument1 pageWire Ferules Description Fuji Fuji Name Digital Input Analog InputMohammed SajidNo ratings yet
- Adobe Scan 17-Oct-2023Document5 pagesAdobe Scan 17-Oct-2023mehra familyNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- High Voltage Direct Current Transmission: Converters, Systems and DC GridsFrom EverandHigh Voltage Direct Current Transmission: Converters, Systems and DC GridsNo ratings yet
- Standard of Operation On MotorDocument1 pageStandard of Operation On Motorhaiqal ghaniNo ratings yet
- ElectricalcostCSD (Autosaved) - 7Document2 pagesElectricalcostCSD (Autosaved) - 7haiqal ghaniNo ratings yet
- ShaftsealpumpDocument1 pageShaftsealpumphaiqal ghaniNo ratings yet
- List of CableDocument1 pageList of Cablehaiqal ghaniNo ratings yet
- Power System Supply in Institut Kanser NegaraDocument21 pagesPower System Supply in Institut Kanser Negarahaiqal ghaniNo ratings yet
- Voltage DropDocument45 pagesVoltage Drophaiqal ghaniNo ratings yet
- Monthly Meter Reading August-September 23Document8 pagesMonthly Meter Reading August-September 23haiqal ghaniNo ratings yet
- Sodapdf MergedDocument2 pagesSodapdf Mergedhaiqal ghaniNo ratings yet
- Cables: Aerial BundledDocument5 pagesCables: Aerial Bundledhaiqal ghaniNo ratings yet
- Dell 23 Monitor P2319H Data SheetDocument4 pagesDell 23 Monitor P2319H Data Sheethaiqal ghaniNo ratings yet
- PVREA Transformer Impedance Data - 2023 PDFDocument1 pagePVREA Transformer Impedance Data - 2023 PDFhaiqal ghaniNo ratings yet
- Electriccarchargereportmar2019 0 PDFDocument7 pagesElectriccarchargereportmar2019 0 PDFhaiqal ghaniNo ratings yet
- Industrial Training AzamDocument12 pagesIndustrial Training Azamhaiqal ghaniNo ratings yet
- Report LIDocument76 pagesReport LIhaiqal ghaniNo ratings yet
- Pulsar Evolution 2200-3000 - Installation and User Manual - Multi LangDocument172 pagesPulsar Evolution 2200-3000 - Installation and User Manual - Multi Langenes051100% (1)
- Medidores de Resistencia en Tierra Telurometros Digitales DT 5300 Cem Manual InglesDocument22 pagesMedidores de Resistencia en Tierra Telurometros Digitales DT 5300 Cem Manual Inglesjosemartin24100% (1)
- Operation Manual - Secondary Injection Set - RFD 200 S3Document27 pagesOperation Manual - Secondary Injection Set - RFD 200 S3Sultan Uddin KhanNo ratings yet
- 4.0 - NEC and PV Rev 4Document77 pages4.0 - NEC and PV Rev 4Nels OdrajafNo ratings yet
- O-4 Sensor DwyerDocument1 pageO-4 Sensor DwyernhungtruongNo ratings yet
- SCHNEIDER Protection Guide 2008Document76 pagesSCHNEIDER Protection Guide 2008Snejana Vasileva100% (1)
- Digital AutomationsDocument29 pagesDigital AutomationsBeltazor HellboyNo ratings yet
- Homework Answers For ELET 3402 Chapter 4Document5 pagesHomework Answers For ELET 3402 Chapter 4biatris pNo ratings yet
- UDC3200 Universal Digital Controller Product Manual: 51-52-25-119 April 2008Document242 pagesUDC3200 Universal Digital Controller Product Manual: 51-52-25-119 April 2008darkomega21No ratings yet
- Plasma Arc MachiningDocument18 pagesPlasma Arc MachiningStephen WeiNo ratings yet
- Plecs ManualDocument738 pagesPlecs ManualKhanh Hung NguyenNo ratings yet
- Datasheet Demo Circuit 1894B Con LTC6804-1Document16 pagesDatasheet Demo Circuit 1894B Con LTC6804-1David Y Marcos Alcaraz MartinezNo ratings yet
- Unit I Conducting Materials - Simple FormDocument21 pagesUnit I Conducting Materials - Simple FormsmartkayelNo ratings yet
- R18 B.Tech. EEE Syllabus Jntu HyderabadDocument2 pagesR18 B.Tech. EEE Syllabus Jntu HyderabadUpender Rao SunkishalaNo ratings yet
- Wide Damping Region For LCL Type Grid-Connected Inverter With An Improved Capacitor-Current-Feedback MethodDocument13 pagesWide Damping Region For LCL Type Grid-Connected Inverter With An Improved Capacitor-Current-Feedback MethodbibiNo ratings yet
- Physics Project: Topic - Communication SystemDocument13 pagesPhysics Project: Topic - Communication SystemJeremiah Rokhum75% (4)
- Generator Protection REG670 2.1 ANSI and Injection Equipment REX060, REX061, REX062Document92 pagesGenerator Protection REG670 2.1 ANSI and Injection Equipment REX060, REX061, REX062Diego dos Santos AmaralNo ratings yet
- Key Features: P1200/Nd SeriesDocument2 pagesKey Features: P1200/Nd SeriesJuan Carlos Avila GonzalezNo ratings yet
- Tse Am Cet 18 Final Phase Last RanksDocument23 pagesTse Am Cet 18 Final Phase Last RanksVinod KumarNo ratings yet
- Manual GE L30Document676 pagesManual GE L30KoslerNo ratings yet
- EMC06 Bpdiffpair PresentationDocument22 pagesEMC06 Bpdiffpair PresentationvasikarantceNo ratings yet
- 440v 3 Phase Rotary Converter HelpDocument5 pages440v 3 Phase Rotary Converter HelpAhmed Boussoffara100% (1)
- IL-NT MRS 2.1 Reference GuideDocument123 pagesIL-NT MRS 2.1 Reference GuideAbdul_SamadNo ratings yet
- Ege Ge Egege eDocument8 pagesEge Ge Egege eAjay Kumar PrajapatiNo ratings yet
- EATON COMBINER BOX Solar Inverters and Electrical Balance of System For Commerical Utility ApplicationsDocument84 pagesEATON COMBINER BOX Solar Inverters and Electrical Balance of System For Commerical Utility Applicationspradeep.sNo ratings yet
- Exercise For Eng VDocument3 pagesExercise For Eng VNasrul HaqNo ratings yet
- Alternatoer Lvsi804s WDG 12 v9 TdsDocument8 pagesAlternatoer Lvsi804s WDG 12 v9 TdsCris_eu09No ratings yet
- sn74lvc2g240 PDFDocument19 pagessn74lvc2g240 PDFМая НайденоваNo ratings yet