Download as pdf or txt
You might also like
- 2016-03-04 Update CS-810 Series Instruction Book - 1457060294 PDFDocument25 pages2016-03-04 Update CS-810 Series Instruction Book - 1457060294 PDFوفدان صحب الجهاز0% (1)
- Electrical Component LocationDocument139 pagesElectrical Component Locationjhon greig75% (4)
- Scara RobotDocument65 pagesScara RobotTuan NguyenNo ratings yet
- Metro, Light Rail and Tram Systems in EuropeDocument44 pagesMetro, Light Rail and Tram Systems in EuropeRizki Fajar NovantoNo ratings yet
- Dynaflo DP 60hz CatalogDocument44 pagesDynaflo DP 60hz Catalognpclap67% (3)
- KMC Ic E-CatalogueDocument96 pagesKMC Ic E-CatalogueGustavo HurtadoNo ratings yet
- Robot Search and Rescue DesignDocument86 pagesRobot Search and Rescue DesignAMOS SIFUNANo ratings yet
- 3 Axis CNC Router 60x60x5Document13 pages3 Axis CNC Router 60x60x5Bien Morfe100% (1)
- ReportDocument83 pagesReportKushal PrasadNo ratings yet
- Soure EnglishDocument121 pagesSoure EnglishThảo DươngNo ratings yet
- Root File 150919 PDFDocument2 pagesRoot File 150919 PDFSteven LucasNo ratings yet
- Design and Analysis of A Stewart-Platform-Based Six-Axis Load CellDocument43 pagesDesign and Analysis of A Stewart-Platform-Based Six-Axis Load CellTHỊNH ĐẶNG NGUYỄN GIANo ratings yet
- Project Hexabot 1.1Document16 pagesProject Hexabot 1.1Rahul Kumar MeenaNo ratings yet
- Hierarchical Controller For Highly Dynamic Locomotion Utilizing Pattern Modulation and Impedance Control Implementation On The MIT Cheetah RobotDocument111 pagesHierarchical Controller For Highly Dynamic Locomotion Utilizing Pattern Modulation and Impedance Control Implementation On The MIT Cheetah RobotHong Phuoc DoanNo ratings yet
- Ebook Robot Learning Human Skills and Intelligent Control Design 1St Edition Yang Chenguang Zeng Chao Zhang Jianwei Online PDF All ChapterDocument70 pagesEbook Robot Learning Human Skills and Intelligent Control Design 1St Edition Yang Chenguang Zeng Chao Zhang Jianwei Online PDF All Chapterangela.chaires542100% (8)
- Cogging Torque, Torque Ripple and Radial Force Analysis of PMSMDocument200 pagesCogging Torque, Torque Ripple and Radial Force Analysis of PMSMraminasehNo ratings yet
- Detailed Design ProjectDocument58 pagesDetailed Design ProjectMintesinot T GebreNo ratings yet
- Dynamic Bat-Control of A Redundant Ball Playing Robot: Dennis SchütheDocument95 pagesDynamic Bat-Control of A Redundant Ball Playing Robot: Dennis Schüthetejiwi8203No ratings yet
- Reverse Engineering For Beginners-En-liteDocument153 pagesReverse Engineering For Beginners-En-litealfiozzzNo ratings yet
- APA Dissertation 2024 NhatHungVu 32095212Document24 pagesAPA Dissertation 2024 NhatHungVu 32095212vunhath205No ratings yet
- Compliant Manipulators 2014Document72 pagesCompliant Manipulators 2014newkid2202No ratings yet
- Team30 Project2 ReportDocument11 pagesTeam30 Project2 Reportapi-287948833No ratings yet
- FB 220402190133Document113 pagesFB 220402190133alecandro_90No ratings yet
- Grad ReportDocument92 pagesGrad ReportHaitham Mohammed Fawzy Ali Ali ElshaterNo ratings yet
- User'S Guide: Simmechanics™ 3Document292 pagesUser'S Guide: Simmechanics™ 3Thiago AbraaoNo ratings yet
- Design of Robotic Quadruped Legs: Jacob Elijah Mckenzie ArchivesDocument171 pagesDesign of Robotic Quadruped Legs: Jacob Elijah Mckenzie ArchivesThoan MạnhNo ratings yet
- Continuous Thread Stud Double End Stud ADocument11 pagesContinuous Thread Stud Double End Stud AMarius Mihai Buzduga0% (1)
- Low Cost Hobby Servo XY TableDocument16 pagesLow Cost Hobby Servo XY TableJBarreto2No ratings yet
- Mulata AaaaaaDocument62 pagesMulata AaaaaaRoha Engineering50% (2)
- Alias Studio ConceptsDocument78 pagesAlias Studio ConceptsYuri Arce EspinosaNo ratings yet
- Snake RobotDocument54 pagesSnake RobotInzamam MuhammedNo ratings yet
- Izotope - Ozone Advanced 7.0.1.1362, Insight 1.05.481Document7 pagesIzotope - Ozone Advanced 7.0.1.1362, Insight 1.05.481thepsalmistNo ratings yet
- Jimmy R Design ReportDocument88 pagesJimmy R Design ReportAli A.MNo ratings yet
- StiffnessAnalysisofCable DrivenParallelRobots Moradi Amir PHDDocument135 pagesStiffnessAnalysisofCable DrivenParallelRobots Moradi Amir PHDRAZIQ YOUSSEFNo ratings yet
- Build A CNC Router From Scratch Part 2 CompletDocument7 pagesBuild A CNC Router From Scratch Part 2 Completjumpupdnbdj100% (1)
- Wire GuideDocument28 pagesWire GuideRuben Bartolome GarciaNo ratings yet
- RE For Beginners-EnDocument648 pagesRE For Beginners-EnSlash210No ratings yet
- Motorcycle Modeling and ControlDocument72 pagesMotorcycle Modeling and ControlkeeblerkhanNo ratings yet
- Shapely and ManufacturingDocument2 pagesShapely and ManufacturingYashaswy GovadaNo ratings yet
- Reverse Engineering For Beginners-EnDocument634 pagesReverse Engineering For Beginners-Enjlmansilla100% (2)
- Final Project Report 2017-1Document43 pagesFinal Project Report 2017-1Ch ArsalanNo ratings yet
- How To Build The One Motor WalkerDocument16 pagesHow To Build The One Motor WalkerSagar TatipamulaNo ratings yet
- Orlov - Fundamentals of Machine Design - Vol 3 - Mir - 1980Document280 pagesOrlov - Fundamentals of Machine Design - Vol 3 - Mir - 1980aliaj005436No ratings yet
- Spsebs1202 SeriesDocument38 pagesSpsebs1202 SeriesJuple My IguanaNo ratings yet
- Reverse Engineering For Beginners-EnDocument942 pagesReverse Engineering For Beginners-EnJOSEJOSE100% (2)
- Power SupplyDocument58 pagesPower SupplyNikolay LoshmanovNo ratings yet
- Slip Modeling and Simulation of Spiral Zipper Friction-Driven Prismatic ActuatorDocument31 pagesSlip Modeling and Simulation of Spiral Zipper Friction-Driven Prismatic ActuatorYuan HUANGNo ratings yet
- Sam DMT800 - 610 - 400 - 350 - 7933 - DW80F800 - 600Document75 pagesSam DMT800 - 610 - 400 - 350 - 7933 - DW80F800 - 600dan theman100% (1)
- Madymo를 이용한 한국인 체형에 대한 시트진동해석Document6 pagesMadymo를 이용한 한국인 체형에 대한 시트진동해석곽수진No ratings yet
- ORSDM Chapter 7 Energy DissipatorsDocument40 pagesORSDM Chapter 7 Energy DissipatorsblNo ratings yet
- Car JackDocument26 pagesCar JackAbin KurianNo ratings yet
- Re4b en PDFDocument1,064 pagesRe4b en PDFSuresh SaravananNo ratings yet
- End Effector Analysis PDFDocument34 pagesEnd Effector Analysis PDFBas RamuNo ratings yet
- Finite Element Analysis For Biomedical Engineering ApplicationsDocument27 pagesFinite Element Analysis For Biomedical Engineering ApplicationsFabián SajamaNo ratings yet
- J Jelekin 2010 08 009 PDFDocument12 pagesJ Jelekin 2010 08 009 PDFRommel AndresNo ratings yet
- D14 ReportDocument40 pagesD14 ReportDhruv KhuranaNo ratings yet
- Disturbance rejection control for bipedal robot walkersFrom EverandDisturbance rejection control for bipedal robot walkersNo ratings yet
- Spare Parts Book: FRDP-14-S Rear AxleDocument21 pagesSpare Parts Book: FRDP-14-S Rear AxleАлексейNo ratings yet
- BS 2594-1975Document22 pagesBS 2594-1975محمد نعمان بٹNo ratings yet
- Status of Titanium Blading For Low-Pressure Steam Turbines: E'Ectric Power Research InstituteDocument155 pagesStatus of Titanium Blading For Low-Pressure Steam Turbines: E'Ectric Power Research InstituteSmileNo ratings yet
- Daewoo Training Washing MachineDocument21 pagesDaewoo Training Washing MachinevictorNo ratings yet
- DYNAMICDocument13 pagesDYNAMICAndrea MagtutoNo ratings yet
- 1jzte Wiring InstructionsDocument19 pages1jzte Wiring InstructionsS LNo ratings yet
- Diesel Generator Set K19 Series: Specification SheetDocument1 pageDiesel Generator Set K19 Series: Specification SheetBajero jcniNo ratings yet
- Ebs STD, Ebs Med, Ebs HigDocument15 pagesEbs STD, Ebs Med, Ebs HigSherzad ChemNo ratings yet
- Force B 1989 85 HPDocument65 pagesForce B 1989 85 HPGrupo Empresarial San JoséNo ratings yet
- Instruction Manual Manuel D'instructions Manuale Di IstruzioniDocument64 pagesInstruction Manual Manuel D'instructions Manuale Di IstruzioniJulio Daniel MoralesNo ratings yet
- Masina Multifunctionala de Doborat ArboriDocument16 pagesMasina Multifunctionala de Doborat ArboritwacacaNo ratings yet
- CatalogORION Light-dutybuilt-In Water TankchillerRG11EDocument28 pagesCatalogORION Light-dutybuilt-In Water TankchillerRG11Eandy otserpNo ratings yet
- Bernoulli Theorem DemonstrationDocument27 pagesBernoulli Theorem DemonstrationmanzahuhuNo ratings yet
- Seminar Report TIGDocument13 pagesSeminar Report TIGRahul ShawNo ratings yet
- Tap & Drill Chart W - Decimal Inch & MetricDocument10 pagesTap & Drill Chart W - Decimal Inch & MetricGanesh NatarajanNo ratings yet
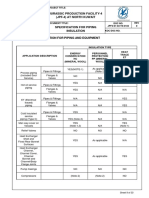
- InsulationDocument5 pagesInsulationjaleelNo ratings yet
- FD 110 XcsDocument193 pagesFD 110 XcsalamNo ratings yet
- Remover e Instalar Camisas de CilindrosDocument4 pagesRemover e Instalar Camisas de CilindrosAlejandro ValenzuelaNo ratings yet
- Manual KDRDocument62 pagesManual KDRShahrukh AliNo ratings yet
- Lubricating Oil RecommendationsDocument7 pagesLubricating Oil RecommendationsMohamed ZakiNo ratings yet
- Basic Principles of Ultrasonic TestingDocument73 pagesBasic Principles of Ultrasonic TestingAhmed Adel100% (2)
- ASTM C411 Test LinesetDocument5 pagesASTM C411 Test LinesetJose RobertoNo ratings yet
- Helios Uk ElsDocument22 pagesHelios Uk ElssanitermNo ratings yet
- WH609-716 M Weam005900 WH6 WH7Document254 pagesWH609-716 M Weam005900 WH6 WH7Carlos Israel Gomez100% (3)
- 1 Beam DesignDocument96 pages1 Beam DesignAmirul Asyraf Bin Mohd BekeriNo ratings yet
- Assignment # 01Document17 pagesAssignment # 01inam ullahNo ratings yet
- Goulds Pumps 3175Document15 pagesGoulds Pumps 3175Mohamed KishkNo ratings yet