Download as pdf or txt
You might also like
- ISB 4 Cylinder and ISBe 4 and 6 Cylinder Series Engine Familiarization 4021288 PDFDocument31 pagesISB 4 Cylinder and ISBe 4 and 6 Cylinder Series Engine Familiarization 4021288 PDFslipsittinNo ratings yet
- CBSE School CodesDocument154 pagesCBSE School CodesAdarsh Kumar25% (8)
- Nerf SupervisionDocument8 pagesNerf Supervisionypxypxypx700No ratings yet
- Beyondpixels: A Comprehensive Review of The Evolution of Neural Radiance FieldsDocument33 pagesBeyondpixels: A Comprehensive Review of The Evolution of Neural Radiance FieldsJuan Pablo MansonNo ratings yet
- NARF22: Neural Articulated Radiance Fields For Configuration-Aware RenderingDocument8 pagesNARF22: Neural Articulated Radiance Fields For Configuration-Aware RenderingIgo AndradeNo ratings yet
- Pascal VocDocument21 pagesPascal VocSoumya AidulapuramNo ratings yet
- GraspNeRF Multiview-Based 6-DoF Grasp Detection For Transparent and Specular Objects Using Generalizable NeRFDocument7 pagesGraspNeRF Multiview-Based 6-DoF Grasp Detection For Transparent and Specular Objects Using Generalizable NeRF4n4p4894p4No ratings yet
- Zhou Learning Deep Features CVPR 2016 Paper PDFDocument9 pagesZhou Learning Deep Features CVPR 2016 Paper PDFricksant2003No ratings yet
- Rafe: Generative Radiance Fields RestorationDocument23 pagesRafe: Generative Radiance Fields Restorationmariellarizoser87No ratings yet
- Manuscript Template 2Document13 pagesManuscript Template 2Aadith Thillai Arasu SNo ratings yet
- NeRF-SR High-Quality Neural Radiance Fields Using Super-SamplingDocument14 pagesNeRF-SR High-Quality Neural Radiance Fields Using Super-Sampling854694704No ratings yet
- Nerf RPNDocument13 pagesNerf RPNypxypxypx700No ratings yet
- Region-Based Convolutional Networks For Accurate Object Detection and SegmentationDocument21 pagesRegion-Based Convolutional Networks For Accurate Object Detection and SegmentationwdwdNo ratings yet
- High Speed Tracking With Kernelized Correlation FiltersDocument14 pagesHigh Speed Tracking With Kernelized Correlation FiltersLarry CocaNo ratings yet
- Ne RFDocument20 pagesNe RFludwig jungnickelNo ratings yet
- Ijett V67i3p224Document7 pagesIjett V67i3p224ranarajnish25No ratings yet
- Research 3rdsemDocument10 pagesResearch 3rdsemmuskan goyalNo ratings yet
- NeRF - NavigationDocument8 pagesNeRF - NavigationBach NguyenNo ratings yet
- Convolutional Neural Networks (Convnets) HaveDocument6 pagesConvolutional Neural Networks (Convnets) HaveNguyễn Minh VũNo ratings yet
- Deep Learning Features at Scale For Visual Place RecognitionDocument8 pagesDeep Learning Features at Scale For Visual Place RecognitionbusuulwaerickNo ratings yet
- Pattern Recognition: Xiaokai Liu, Weihao Ma, Xiaorui Ma, Jie WangDocument11 pagesPattern Recognition: Xiaokai Liu, Weihao Ma, Xiaorui Ma, Jie WangSameer AhmedNo ratings yet
- Vision-Only_Robot_Navigation_in_a_Neural_Radiance_WorldDocument8 pagesVision-Only_Robot_Navigation_in_a_Neural_Radiance_Worldypxypxypx700No ratings yet
- Convolutional Neural Network With Data Augmentation For SAR Target RecognitionDocument5 pagesConvolutional Neural Network With Data Augmentation For SAR Target RecognitionS M RizviNo ratings yet
- Pixel NerfDocument10 pagesPixel Nerfliudiyang1998.aNo ratings yet
- Convolutional Neural Networks For No-Reference Image Quality AssessmentDocument8 pagesConvolutional Neural Networks For No-Reference Image Quality Assessmentgitov13916No ratings yet
- CNN Model For Image Classification Using Resnet: Dr. Senbagavalli M & Swetha Shekarappa GDocument10 pagesCNN Model For Image Classification Using Resnet: Dr. Senbagavalli M & Swetha Shekarappa GTJPRC PublicationsNo ratings yet
- Plen OctreeDocument10 pagesPlen Octreeliudiyang1998.aNo ratings yet
- Adaptive Anchor Networks For Multi-Scale Object Detection in Remote Sensing ImagesDocument14 pagesAdaptive Anchor Networks For Multi-Scale Object Detection in Remote Sensing ImagesJessica CostaNo ratings yet
- Convolutional Neural Networks For Sentence Classification: Yoon Kim New York University Yhk255@nyu - EduDocument6 pagesConvolutional Neural Networks For Sentence Classification: Yoon Kim New York University Yhk255@nyu - EduAhmad KarlamNo ratings yet
- Face Detection Using Gabor Feature Extraction and Artificial Neural NetworkDocument6 pagesFace Detection Using Gabor Feature Extraction and Artificial Neural NetworkParthiban A.PNo ratings yet
- Lip Reading Using Neural Network and DeeDocument7 pagesLip Reading Using Neural Network and Deehelptest303No ratings yet
- Point-NeRF Point-Based Neural Radiance FieldsDocument16 pagesPoint-NeRF Point-Based Neural Radiance Fields854694704No ratings yet
- Real-ESRGAN: Training Real-World Blind Super-Resolution With Pure Synthetic DataDocument13 pagesReal-ESRGAN: Training Real-World Blind Super-Resolution With Pure Synthetic DataNgô Tiến ThiệnNo ratings yet
- 4K-NeRF High Fidelity Neural Radiance Fields at Ultra High ResolutionsDocument16 pages4K-NeRF High Fidelity Neural Radiance Fields at Ultra High Resolutions854694704No ratings yet
- REPORT PythonDocument40 pagesREPORT PythonimrozNo ratings yet
- Low Multi-Modal Aerial View Image Challenge Translation From Synthetic Aperture Radar CVPRW 2023 PaperDocument9 pagesLow Multi-Modal Aerial View Image Challenge Translation From Synthetic Aperture Radar CVPRW 2023 PaperSıla KazanNo ratings yet
- Brief Cognizance Into Tampered Image DetectionDocument12 pagesBrief Cognizance Into Tampered Image DetectionIJRASETPublicationsNo ratings yet
- ICCV2021 - In-Place Scene Labelling and Understanding With Implicit Scene RepresentationDocument10 pagesICCV2021 - In-Place Scene Labelling and Understanding With Implicit Scene Representation4n4p4894p4No ratings yet
- IJISAE 20 Divya+kumawat 3 1834Document10 pagesIJISAE 20 Divya+kumawat 3 1834Siddesh PingaleNo ratings yet
- Regnerf: Regularizing Neural Radiance Fields For View Synthesis From Sparse InputsDocument11 pagesRegnerf: Regularizing Neural Radiance Fields For View Synthesis From Sparse Inputsamrithp1996No ratings yet
- Plenoctree Met SH Uitleg inDocument18 pagesPlenoctree Met SH Uitleg inmrzofkhdibuvcvpesqNo ratings yet
- 4.1 - Unsupervised Visual Representation Learning by Context PredictionDocument10 pages4.1 - Unsupervised Visual Representation Learning by Context Predictionfarzad imanpourNo ratings yet
- Block NerfDocument15 pagesBlock Nerfypxypxypx700No ratings yet
- Voxelmorph: A Learning Framework For Deformable Medical Image RegistrationDocument16 pagesVoxelmorph: A Learning Framework For Deformable Medical Image RegistrationNamNo ratings yet
- Remotesensing 13 04044 v2 CompressedDocument12 pagesRemotesensing 13 04044 v2 Compresseddarshanmythreya14No ratings yet
- Rich Feature Hierarchies For Accurate Object Detection and Semantic SegmentationDocument8 pagesRich Feature Hierarchies For Accurate Object Detection and Semantic Segmentationyadavghyam2001No ratings yet
- Deep Fishernet For Object ClassificationDocument9 pagesDeep Fishernet For Object ClassificationNina MouhoubNo ratings yet
- 1 s2.0 S0925231218300602 MainDocument13 pages1 s2.0 S0925231218300602 MainPiyush BafnaNo ratings yet
- Literature Survey For RoboticsDocument6 pagesLiterature Survey For RoboticsjustadityabistNo ratings yet
- Adequate Reconstruction of Transparent Objects On A Shoestring BudgetDocument8 pagesAdequate Reconstruction of Transparent Objects On A Shoestring Budget会爆炸的小米NoteNo ratings yet
- Lee Iterative Filter Adaptive Network For Single Image Defocus Deblurring CVPR 2021 PaperDocument9 pagesLee Iterative Filter Adaptive Network For Single Image Defocus Deblurring CVPR 2021 PaperJunyong LeeNo ratings yet
- Cite 466 UnitBox An Advanced Object Detection Network ACM M 2016Document5 pagesCite 466 UnitBox An Advanced Object Detection Network ACM M 2016姜华为No ratings yet
- Irish Centre For Fetal and Neonatal Translational Research, University College CorkDocument6 pagesIrish Centre For Fetal and Neonatal Translational Research, University College CorkAnonymous 1DK1jQgAGNo ratings yet
- Deeplab: Semantic Image Segmentation With Deep Convolutional Nets, Atrous Convolution, and Fully Connected CrfsDocument14 pagesDeeplab: Semantic Image Segmentation With Deep Convolutional Nets, Atrous Convolution, and Fully Connected CrfsDesigner TeesNo ratings yet
- Convolutional Neural Networks: Computer Vision CS 543 / ECE 549 University of Illinois Jia-Bin HuangDocument76 pagesConvolutional Neural Networks: Computer Vision CS 543 / ECE 549 University of Illinois Jia-Bin HuangVũ Mạnh CườngNo ratings yet
- RENAS: Reinforced Evolutionary Neural Architecture SearchDocument10 pagesRENAS: Reinforced Evolutionary Neural Architecture Searcharmin dadrasNo ratings yet
- Mip-Nerf 360: Unbounded Anti-Aliased Neural Radiance FieldsDocument18 pagesMip-Nerf 360: Unbounded Anti-Aliased Neural Radiance Fieldsypxypxypx700No ratings yet
- Deep Learning Deep Learning HyperspectralDocument18 pagesDeep Learning Deep Learning Hyperspectralcarlosgg33No ratings yet
- Gnerf: Gan-Based Neural Radiance Field Without Posed CameraDocument12 pagesGnerf: Gan-Based Neural Radiance Field Without Posed CameraZQQNo ratings yet
- IFANDocument30 pagesIFANJunyong LeeNo ratings yet
- 2 - Self-Supervised Learning For Anomaly Detection and LocalizationDocument28 pages2 - Self-Supervised Learning For Anomaly Detection and Localizationfarzad imanpourNo ratings yet
- T10 Folded Cascode - SimoneDocument21 pagesT10 Folded Cascode - SimoneMatei LaurentiuNo ratings yet
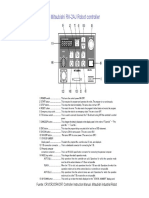
- Mitsubishi RV-2AJ Robot ControllerDocument33 pagesMitsubishi RV-2AJ Robot ControllerStoneNo ratings yet
- Mounting Instruction Series 70+70D+70M - 9420022100Document8 pagesMounting Instruction Series 70+70D+70M - 9420022100Bob ToddNo ratings yet
- Fenwalnet 6000 Configuration Software (FCS 6000) : User's GuideDocument132 pagesFenwalnet 6000 Configuration Software (FCS 6000) : User's GuideJose GutierrezNo ratings yet
- AMR Concept Notes (Sessions 11-12)Document5 pagesAMR Concept Notes (Sessions 11-12)SHREYA UNNIKRISHNAN PGP 2019-21 BatchNo ratings yet
- Baby Booties Pattern Uni - Boots by Vineraeyerpatterns: Skill Level - AdvansedDocument11 pagesBaby Booties Pattern Uni - Boots by Vineraeyerpatterns: Skill Level - AdvansedMariana Anchepe100% (2)
- Power Point Presentation On Analysis and Reduction of Polarization Mode DispersionDocument12 pagesPower Point Presentation On Analysis and Reduction of Polarization Mode Dispersiongvr11100% (1)
- Emet3006 2014Document3 pagesEmet3006 2014Scarl0sNo ratings yet
- HGJHGJHDocument38 pagesHGJHGJHSalmaAn MalikNo ratings yet
- Smart TV Hacking PDFDocument55 pagesSmart TV Hacking PDFrodolfosterNo ratings yet
- Stock Price Prediction Using Long Short Term Memory: International Research Journal of Engineering and Technology (IRJET)Document9 pagesStock Price Prediction Using Long Short Term Memory: International Research Journal of Engineering and Technology (IRJET)Amit SheoranNo ratings yet
- Integrated Virtualization Manager On IBM System p5: PaperDocument140 pagesIntegrated Virtualization Manager On IBM System p5: PaperPriyank SaxenaNo ratings yet
- Including ConstraintsDocument28 pagesIncluding Constraintsapi-19917883No ratings yet
- Envelope Theorem and Identities (Good)Document17 pagesEnvelope Theorem and Identities (Good)sadatnfsNo ratings yet
- Mechanics Midterm Exam 2023 - Answer KeyDocument4 pagesMechanics Midterm Exam 2023 - Answer KeySovann_LongNo ratings yet
- Lesson Plan in Mathematics V Q3 COTDocument6 pagesLesson Plan in Mathematics V Q3 COTBRENDA SUBAANNo ratings yet
- FS - Saffron Interface - V3.0 - 22.11.2013Document16 pagesFS - Saffron Interface - V3.0 - 22.11.2013ApNo ratings yet
- 14 Item 206 BB Base BoardDocument4 pages14 Item 206 BB Base BoardAlexDorNo ratings yet
- Unit 5 - Week 4: Assessment 4Document4 pagesUnit 5 - Week 4: Assessment 4OtikaNo ratings yet
- Gen Chem Revision 2013 PDFDocument2 pagesGen Chem Revision 2013 PDFPSCNo ratings yet
- Knust School of Engineering: Abp Consult LTDDocument1 pageKnust School of Engineering: Abp Consult LTDKwaku frimpongNo ratings yet
- Materials Today: Proceedings: Pavushetti Abhilash, Raghavan Nanda Kumar, Raparthi Praveen KumarDocument5 pagesMaterials Today: Proceedings: Pavushetti Abhilash, Raghavan Nanda Kumar, Raparthi Praveen Kumarmuntasir antuNo ratings yet
- Evo Sem SopDocument13 pagesEvo Sem SopAswr100% (1)
- PFD Asam Benzoat - Noor Wahyu & NurulDocument1 pagePFD Asam Benzoat - Noor Wahyu & NurulFahmi ZakariaNo ratings yet
- db2 Perf Tune 115Document702 pagesdb2 Perf Tune 115TrurlScribd100% (1)
- Yamaha Owners Manual VX110Document26 pagesYamaha Owners Manual VX110Kyle Peralta50% (2)
- Padalkar 2013Document13 pagesPadalkar 2013William RodriguezNo ratings yet
- CPE7012-B Coursework 2 Brief 2020-1Document6 pagesCPE7012-B Coursework 2 Brief 2020-1Prashant PrashantNo ratings yet