Download as xlsx, pdf, or txt
You might also like
- VW Amarok 2011 Circuit Diagrams Eng PDFDocument1,041 pagesVW Amarok 2011 Circuit Diagrams Eng PDFAmarok100% (8)
- Cost Sheet Analysis of Britannia BreadDocument27 pagesCost Sheet Analysis of Britannia BreadSagar Yadav89% (9)
- Case Study 3: Fountain Pens LimitedDocument3 pagesCase Study 3: Fountain Pens Limitedtanya singh100% (1)
- Auto Transmission V6 PDFDocument791 pagesAuto Transmission V6 PDFวรพงษ์ กอชัชวาล100% (1)
- ZAMIL PY Series Installation, Operation & Maintenance ManualDocument33 pagesZAMIL PY Series Installation, Operation & Maintenance Manualambuenaflor70% (10)
- Wiring Ecu CalyaDocument22 pagesWiring Ecu Calyakurnia wan100% (4)
- BSBMKG608 Task 2 CompletedDocument6 pagesBSBMKG608 Task 2 CompletedCath HalimNo ratings yet
- Lean Systems SLIDES Krajewski - OM11ge - C06Document57 pagesLean Systems SLIDES Krajewski - OM11ge - C06Amal Ghrooz100% (1)
- HS402 DIY Oscilloscope Components List: Designator Quantity Value Description Footprint Comment PhotoDocument5 pagesHS402 DIY Oscilloscope Components List: Designator Quantity Value Description Footprint Comment PhotoИльнур ТагировNo ratings yet
- Model: CSP-A125: Direct Drive Cabinet FanDocument2 pagesModel: CSP-A125: Direct Drive Cabinet FanJuan SánchezNo ratings yet
- New 017 2012 HyDocument1 pageNew 017 2012 HyРома БлошенкоNo ratings yet
- 13 RDM 181238Document2 pages13 RDM 181238orangelanaya-1No ratings yet
- 900-DS Electrical Systems (Engine Starting Circuit) - 1Document14 pages900-DS Electrical Systems (Engine Starting Circuit) - 1THONY100% (2)
- Parameter Ku-476Document18 pagesParameter Ku-476teknisiinverterpkNo ratings yet
- Paccar mx13 Epa 10 OriginalDocument7 pagesPaccar mx13 Epa 10 Originaling.josueqtorresNo ratings yet
- برمجه انفرتر Invt جيرلس انجليزيDocument1 pageبرمجه انفرتر Invt جيرلس انجليزيabuknan5502007No ratings yet
- MKJ - 005 - 24 - Parametros - 001 (W-801)Document8 pagesMKJ - 005 - 24 - Parametros - 001 (W-801)Paulo Davi RomanoNo ratings yet
- MEGA Servo Setup Procedure For Driving PMS Motor: Application Note AN-MEGA-0016-v105ENDocument7 pagesMEGA Servo Setup Procedure For Driving PMS Motor: Application Note AN-MEGA-0016-v105ENhziarabNo ratings yet
- HP Mount Perameter FFFDocument2 pagesHP Mount Perameter FFFPrasanth KannanthodiNo ratings yet
- 610 BC01 BW01 ParameterDocument6 pages610 BC01 BW01 ParameterValipireddy NagarjunNo ratings yet
- Aer 20 03 0305 VGDocument2 pagesAer 20 03 0305 VGhussamalsaadanyNo ratings yet
- VSD Compressor Parameter Micro Master 440Document2 pagesVSD Compressor Parameter Micro Master 440Nishant AnandNo ratings yet
- Aer 24 03 0605 VGDocument2 pagesAer 24 03 0605 VGhussamalsaadanyNo ratings yet
- Aer 24 03 0300 VGDocument2 pagesAer 24 03 0300 VGErnesto TrzdNo ratings yet
- PR-PO DashboardDocument1 pagePR-PO Dashboarddutabangunpratama.salesNo ratings yet
- Status High IdleDocument1 pageStatus High IdlehanumkiyamaNo ratings yet
- 48.01.SH.01.TP.004 Punch ListDocument6 pages48.01.SH.01.TP.004 Punch ListcgnanaponNo ratings yet
- CSP A390 VGDocument2 pagesCSP A390 VGqpuc198No ratings yet
- Catcatcat Electronics Detec 03aDocument1 pageCatcatcat Electronics Detec 03aDoni SouzaNo ratings yet
- Read Chapter 3, The 8051 Microcontroller Architecture, Programming and Applications by Kenneth .J.AyalaDocument32 pagesRead Chapter 3, The 8051 Microcontroller Architecture, Programming and Applications by Kenneth .J.AyalaAnkitfellenNo ratings yet
- Vc34 Kompend Mds eDocument4 pagesVc34 Kompend Mds eSafetyjoe2No ratings yet
- P&Id P&ID P&Id P&Id Piping & Instrument Diagram Piping & Instrument Diagram PG G PG GDocument23 pagesP&Id P&ID P&Id P&Id Piping & Instrument Diagram Piping & Instrument Diagram PG G PG GAmirNo ratings yet
- CSP A200Document2 pagesCSP A200qpuc198No ratings yet
- Valve Configuration: Customer: ManitexDocument3 pagesValve Configuration: Customer: ManitexАлександър ПухлевNo ratings yet
- Model: SQ-20-07-0700-B: Direct Drive Inline FanDocument2 pagesModel: SQ-20-07-0700-B: Direct Drive Inline FanEduardo Alberto Salas GomezNo ratings yet
- 24LEMA0053 BBVA CR 6335 GUADALAJARA - SubmittalDocument5 pages24LEMA0053 BBVA CR 6335 GUADALAJARA - SubmittalAnna JiménezNo ratings yet
- Data Motor Motor ListrikDocument10 pagesData Motor Motor ListrikAsrulNo ratings yet
- Read Chapter 3, The 8051 Microcontroller Architecture, Programming and Applications by Kenneth .J.AyalaDocument32 pagesRead Chapter 3, The 8051 Microcontroller Architecture, Programming and Applications by Kenneth .J.AyalapsmeeeNo ratings yet
- Fujitsu Siemens Amilo Pa1510 Uniwill L50RI0 Rev A Schematic Diagram PDFDocument29 pagesFujitsu Siemens Amilo Pa1510 Uniwill L50RI0 Rev A Schematic Diagram PDFYes YesyesNo ratings yet
- Model: GB-360-50: Belt Drive Centrifugal Roof Exhaust FanDocument12 pagesModel: GB-360-50: Belt Drive Centrifugal Roof Exhaust Fanjhon manuel de jesusNo ratings yet
- Tham So Bien Tan FUJI HISADocument2 pagesTham So Bien Tan FUJI HISAminhnoNo ratings yet
- Atmega325p Atmega3250pDocument364 pagesAtmega325p Atmega3250pPiterKK KosewskiNo ratings yet
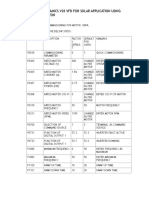
- v20 VFD Setting For Solar Application With External P.BDocument3 pagesv20 VFD Setting For Solar Application With External P.BportlandguyzNo ratings yet
- TM G5SW 015Document27 pagesTM G5SW 015Evandro PavesiNo ratings yet
- 1.0L GTDI FocusDocument5 pages1.0L GTDI FocuscristianNo ratings yet
- Особенности электрооборудования с ЭБУ Siemens PDFDocument10 pagesОсобенности электрооборудования с ЭБУ Siemens PDFvik_mdNo ratings yet
- SAMAND Особенности Электрооборудования с ЭБУ SiemensDocument10 pagesSAMAND Особенности Электрооборудования с ЭБУ Siemensvik_mdNo ratings yet
- WTKT 20 E0 LS 001 - Rev.1 IFI - Electrical Load ListDocument1 pageWTKT 20 E0 LS 001 - Rev.1 IFI - Electrical Load ListJauhar FarrasyahNo ratings yet
- EN 4080 S 9 Elektr Schaltpl T4final A4Document50 pagesEN 4080 S 9 Elektr Schaltpl T4final A4Chris VerlindenNo ratings yet
- 89C51Document15 pages89C51Bhasker GurramNo ratings yet
- Chana CX20 MT22.1 PinoutDocument3 pagesChana CX20 MT22.1 PinoutDiego QuiridunbayNo ratings yet
- Dry Gas Seal Failures in A Recycle Gas Centrifugal CompDocument15 pagesDry Gas Seal Failures in A Recycle Gas Centrifugal CompamritNo ratings yet
- P&ID Piping & Instrument DiagramDocument23 pagesP&ID Piping & Instrument Diagramalejandro inostrozaNo ratings yet
- Product Catalogue 2010 Kubota Diesel Power Dps Pum 59cdb7cd1723ddf9655ed92cDocument28 pagesProduct Catalogue 2010 Kubota Diesel Power Dps Pum 59cdb7cd1723ddf9655ed92cYew Lim100% (1)
- Comp 10 6 X 7 Phe7 Ba2Document2 pagesComp 10 6 X 7 Phe7 Ba2Ravi KantNo ratings yet
- SQ 80 VGDocument2 pagesSQ 80 VGmech_sahilNo ratings yet
- CM 470iiDocument4 pagesCM 470iiChachou MohamedNo ratings yet
- Ford Motor Company Group Diagnostic Trouble CodesDocument5 pagesFord Motor Company Group Diagnostic Trouble Codeslester100% (48)
- CSP A200Document2 pagesCSP A200qpuc198No ratings yet
- PUMA P200 Below HP-20 Above HP-20: ST STDocument1 pagePUMA P200 Below HP-20 Above HP-20: ST STChun ZaibNo ratings yet
- UPC1892Document43 pagesUPC1892Hari HaranNo ratings yet
- Atmega 165 PDocument365 pagesAtmega 165 Pvanhuong87No ratings yet
- Literature D-Series 05018731-1002Document4 pagesLiterature D-Series 05018731-1002Kenny HebertNo ratings yet
- Bass Tool and SupplyDocument2 pagesBass Tool and SupplyKenny HebertNo ratings yet
- Durapulse GS20 SCHDocument1 pageDurapulse GS20 SCHKenny HebertNo ratings yet
- Grow TrackerDocument2 pagesGrow TrackerKenny HebertNo ratings yet
- Bridgeport DC Drive Motor PlateDocument1 pageBridgeport DC Drive Motor PlateKenny HebertNo ratings yet
- EBBODocument45 pagesEBBOKenny HebertNo ratings yet
- Bone DustDocument1 pageBone DustKenny HebertNo ratings yet
- CBD TestDocument1 pageCBD TestKenny HebertNo ratings yet
- Automated Hydro 5 Pumps 5-21-23Document9 pagesAutomated Hydro 5 Pumps 5-21-23Kenny HebertNo ratings yet
- ICG Tracking SheetDocument8 pagesICG Tracking SheetKenny HebertNo ratings yet
- Old SmokeyDocument2 pagesOld SmokeyKenny HebertNo ratings yet
- Untitled 1Document1 pageUntitled 1Kenny HebertNo ratings yet
- Ardruino Board and Sensors For Hydroponic SystemDocument2 pagesArdruino Board and Sensors For Hydroponic SystemKenny HebertNo ratings yet
- Millermatic 210Document56 pagesMillermatic 210Kenny HebertNo ratings yet
- Automated Hydroponic System Build - Projects - Kyle GabrielDocument93 pagesAutomated Hydroponic System Build - Projects - Kyle GabrielKenny HebertNo ratings yet
- Mango Habanero Hot Sauce RecipeDocument2 pagesMango Habanero Hot Sauce RecipeKenny HebertNo ratings yet
- Full Production ControlDocument14 pagesFull Production ControlKenny HebertNo ratings yet
- AXBB E ManualDocument29 pagesAXBB E ManualKenny HebertNo ratings yet
- ACORN Axis Driven Turret Instructions Rev3Document2 pagesACORN Axis Driven Turret Instructions Rev3Kenny HebertNo ratings yet
- Gecko203v WiringDocument1 pageGecko203v WiringKenny HebertNo ratings yet
- Eaton Corporation vs. BCH Electric LimitedDocument49 pagesEaton Corporation vs. BCH Electric LimitedSoniNo ratings yet
- Waqar MSPM (PM)Document3 pagesWaqar MSPM (PM)Waqar ShahNo ratings yet
- Ali Anas - OriginalDocument3 pagesAli Anas - OriginalhsaifNo ratings yet
- Aquarium Services Business PlanDocument30 pagesAquarium Services Business PlanZuzani MathiyaNo ratings yet
- 02 PQD Iiwwtw-Cp798 - Part 1 and 2Document110 pages02 PQD Iiwwtw-Cp798 - Part 1 and 2muhammedshihasuNo ratings yet
- HARKESH RAY - CV TCCDocument4 pagesHARKESH RAY - CV TCCibrahimNo ratings yet
- Principles of Management v3 0 3rd Edition Erdogan Test BankDocument15 pagesPrinciples of Management v3 0 3rd Edition Erdogan Test Bankedwardjezebelb98x9100% (30)
- Intro To Accounting 2Document29 pagesIntro To Accounting 2Edward BellNo ratings yet
- Accounting What The Numbers Mean Marshall 10th Edition Solutions ManualDocument24 pagesAccounting What The Numbers Mean Marshall 10th Edition Solutions ManualBillyBishoptpyc100% (54)
- Chapter 3Document11 pagesChapter 3Trang Lê Thị ThùyNo ratings yet
- Kf16ce49 - Assignment #1Document9 pagesKf16ce49 - Assignment #1Aslam LaghariNo ratings yet
- Coronavirus's Impact On Supply Chain - McKinseyDocument10 pagesCoronavirus's Impact On Supply Chain - McKinseyShiKhei ChanNo ratings yet
- Problem 1: 1.1Document7 pagesProblem 1: 1.1Janna Mari FriasNo ratings yet
- CH 1 2 5 6 7 8 9 Exercises From Book Accp301Document66 pagesCH 1 2 5 6 7 8 9 Exercises From Book Accp301rylNo ratings yet
- Sensibilisation Aux 5S: Olivier PRESSOIRDocument27 pagesSensibilisation Aux 5S: Olivier PRESSOIRWafa AjiliNo ratings yet
- Newspaper - Advert - 20072023 - Other - VacanciesDocument3 pagesNewspaper - Advert - 20072023 - Other - Vacanciespeterkimani24138255No ratings yet
- Ia-Carp Q1 W3 PDFDocument16 pagesIa-Carp Q1 W3 PDFLaurenceFabialaNo ratings yet
- Acc 2021 GR 11 T1 Week 4 Asset Disposal ENGDocument7 pagesAcc 2021 GR 11 T1 Week 4 Asset Disposal ENGziyandamadlolo07No ratings yet
- Total Productive Maintenance: By: Mudit M. SaxenaDocument55 pagesTotal Productive Maintenance: By: Mudit M. SaxenacjksdbvjkcsbNo ratings yet
- Solution Manual For Managerial Accounting For Managers 5th Edition Eric Noreen Peter Brewer Ray GarrisonDocument21 pagesSolution Manual For Managerial Accounting For Managers 5th Edition Eric Noreen Peter Brewer Ray Garrisoncymule.nenia.szj6100% (52)
- 5S-Kaizen-TQM Concepts, JICA, Health, TOTDocument33 pages5S-Kaizen-TQM Concepts, JICA, Health, TOTGustavo CanepaNo ratings yet
- TISAX Certification - ENX Association - WebinarDocument14 pagesTISAX Certification - ENX Association - WebinarJohn DoeNo ratings yet
- Gros Koch Wallek 2017Document40 pagesGros Koch Wallek 2017EL GHARBAOUINo ratings yet
- Instalment Payment Plan FormDocument1 pageInstalment Payment Plan Formckeat_2No ratings yet
- Pet Cafe PlaybookDocument57 pagesPet Cafe PlaybookGabija MockutėNo ratings yet
- Management Theory Chapter 9Document31 pagesManagement Theory Chapter 9AddiNo ratings yet