Download as pdf or txt
You might also like
- Automated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsFrom EverandAutomated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsNo ratings yet
- 2013 Dodge Ram 1500 Color Schematics Sound Systems Premium Radio Circuit 3 of 3Document1 page2013 Dodge Ram 1500 Color Schematics Sound Systems Premium Radio Circuit 3 of 3Ndao86No ratings yet
- Synopsis RashnaDocument9 pagesSynopsis RashnaKamal ChapagainNo ratings yet
- Upfc For Power System StabilityDocument74 pagesUpfc For Power System StabilityVinayKumarNo ratings yet
- 2do EPSR - Source - ManuscriptDocument23 pages2do EPSR - Source - Manuscriptdav salrangelNo ratings yet
- 13 - Paper 20Document5 pages13 - Paper 20raghudtsNo ratings yet
- L.Jebaraj L.Jebaraj, C.Christober Asir Rajan: Vol 03, Issue 03 July-Sep 2012 2012Document10 pagesL.Jebaraj L.Jebaraj, C.Christober Asir Rajan: Vol 03, Issue 03 July-Sep 2012 2012JEBARAJNo ratings yet
- IRJIET704006Document9 pagesIRJIET704006DungNo ratings yet
- Flowsheet PDFDocument6 pagesFlowsheet PDFYurikaNo ratings yet
- Ieee Freq01 Final1aDocument11 pagesIeee Freq01 Final1aferyfivaldiNo ratings yet
- Thiết kế bộ PSSDocument68 pagesThiết kế bộ PSSTan NguyenNo ratings yet
- Improving Transient Stability of Power Systems by Using Passivity-Bassed Nonlinear STATCOM ControllerDocument51 pagesImproving Transient Stability of Power Systems by Using Passivity-Bassed Nonlinear STATCOM ControllervireshmathadNo ratings yet
- A Study On Grid Connected PV SystemDocument6 pagesA Study On Grid Connected PV SystemsamNo ratings yet
- 2024 Powerful Oscillation Damping Controller For VSC Renewable Generators Using Hydrogen Energy Storage SystemsDocument10 pages2024 Powerful Oscillation Damping Controller For VSC Renewable Generators Using Hydrogen Energy Storage SystemsJorge Luis Vega HerreraNo ratings yet
- Multi-Machine Power System Stabilizer Adjustment Using Genetic AlgorithmsDocument5 pagesMulti-Machine Power System Stabilizer Adjustment Using Genetic AlgorithmsHarish S KiranNo ratings yet
- 13.A) List of Referred Journals PapersDocument4 pages13.A) List of Referred Journals Paperskrishnareddy_chintalaNo ratings yet
- SuezaDocument1 pageSuezaSueja MalligwadNo ratings yet
- Statcom ThesisDocument64 pagesStatcom ThesisAnonymous yD6Qpiq3100% (1)
- Detection of Power Grid Synchronization FailureDocument5 pagesDetection of Power Grid Synchronization FailureIJRASETPublicationsNo ratings yet
- Small Signal Stability Analysis of A Two Area System With and Without The Integration of A Large Scale Wind Farm Using PSATDocument6 pagesSmall Signal Stability Analysis of A Two Area System With and Without The Integration of A Large Scale Wind Farm Using PSATPooja kNo ratings yet
- Modeling And Control Of 3-Ф Grid Connected Inverter System For Distributed Power Generation SystemDocument55 pagesModeling And Control Of 3-Ф Grid Connected Inverter System For Distributed Power Generation SystemJAYADHAR VEERISETTYNo ratings yet
- MATLAB/Simlink Based Power System Stabilizer With PID ControllerDocument14 pagesMATLAB/Simlink Based Power System Stabilizer With PID ControllerragaNo ratings yet
- Design of Power System Stabilizer Based On Adaptive Neuro-Fuzzy MethodDocument9 pagesDesign of Power System Stabilizer Based On Adaptive Neuro-Fuzzy MethodDodi AndriNo ratings yet
- Small-Signal Stability Analysis of Three-Phase AC Systems in The Presence of Constant Power Loads Based On Measured D-Q Frame ImpedancesDocument14 pagesSmall-Signal Stability Analysis of Three-Phase AC Systems in The Presence of Constant Power Loads Based On Measured D-Q Frame ImpedancesNuradin JemalNo ratings yet
- JETIR1602005Document6 pagesJETIR1602005Med GuerNo ratings yet
- 17G StabilityDocument5 pages17G StabilityWoldemariam WorkuNo ratings yet
- International Journal of Computational Engineering Research (IJCER)Document5 pagesInternational Journal of Computational Engineering Research (IJCER)International Journal of computational Engineering research (IJCER)No ratings yet
- Steady State Stability Analysis and Improvement Using Eigenvalues and PSSDocument6 pagesSteady State Stability Analysis and Improvement Using Eigenvalues and PSSNithyashriNo ratings yet
- Mukherjee 2021 IOP Conf. Ser. Earth Environ. Sci. 785 012003Document7 pagesMukherjee 2021 IOP Conf. Ser. Earth Environ. Sci. 785 012003Rolistone FankamNo ratings yet
- PWM Inverter Based Smart Air Cooling Machine (A/C) : IEEE Trans. On Power DeliveryDocument2 pagesPWM Inverter Based Smart Air Cooling Machine (A/C) : IEEE Trans. On Power DeliverytaksasNo ratings yet
- Asymmetric Bridge Converter For Switched Reluctance MotorDocument4 pagesAsymmetric Bridge Converter For Switched Reluctance MotorInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Energies 15 03809 v2Document29 pagesEnergies 15 03809 v2BilNo ratings yet
- Bifurcation in ADocument10 pagesBifurcation in AVenkatesan SwamyNo ratings yet
- UPQC Based Power Quality Improvement in Distribution System Connected With PV ArraysDocument8 pagesUPQC Based Power Quality Improvement in Distribution System Connected With PV ArraysIdrisNo ratings yet
- Stability Improvement of Power System (SMIB) by Genetically Tuned Power System StabilizerDocument4 pagesStability Improvement of Power System (SMIB) by Genetically Tuned Power System StabilizererpublicationNo ratings yet
- Voltage Stability Evaluation Using Modal Anaysis PDFDocument4 pagesVoltage Stability Evaluation Using Modal Anaysis PDFwvargas926No ratings yet
- Ijireeice 2022 10440Document6 pagesIjireeice 2022 10440martin solarNo ratings yet
- Impact of PSS and SVC On The Power System Transient StabilityDocument7 pagesImpact of PSS and SVC On The Power System Transient StabilityKamran KhanNo ratings yet
- I EECONDocument7 pagesI EECONUjjawal kumarNo ratings yet
- Renewable Energy SimulationDocument6 pagesRenewable Energy Simulationvipin chandNo ratings yet
- Study of Compensation Device by Mat Lab Simulation: Suparna PalDocument4 pagesStudy of Compensation Device by Mat Lab Simulation: Suparna PalSuparna DebNo ratings yet
- Power System Stability & Control - Wide Area Damping ControllerDocument6 pagesPower System Stability & Control - Wide Area Damping ControllerPradeep MuppanaNo ratings yet
- Loss Minimization by Reconfiguration in Radial Distribution Network Using Whale Optimization TechniqueDocument6 pagesLoss Minimization by Reconfiguration in Radial Distribution Network Using Whale Optimization TechniqueVempalle RafiNo ratings yet
- Design of Power System Stabilizer PDFDocument68 pagesDesign of Power System Stabilizer PDFNuraddeen MagajiNo ratings yet
- Co Ordination of Overcurrent Relay For ChemistryDocument4 pagesCo Ordination of Overcurrent Relay For ChemistryChú cún sa mạcNo ratings yet
- Power Flow Analysis On Ieee 57 Bus System Using Matlab IJERTV3IS080738 PDFDocument11 pagesPower Flow Analysis On Ieee 57 Bus System Using Matlab IJERTV3IS080738 PDFRana FaizanNo ratings yet
- Power Flow Analysis On Ieee 57 Bus System Using Matlab IJERTV3IS080738 PDFDocument11 pagesPower Flow Analysis On Ieee 57 Bus System Using Matlab IJERTV3IS080738 PDFRana FaizanNo ratings yet
- Power Flow Analysis On Ieee 57 Bus System Using Matlab IJERTV3IS080738Document11 pagesPower Flow Analysis On Ieee 57 Bus System Using Matlab IJERTV3IS080738Rana FaizanNo ratings yet
- Sample 7523Document11 pagesSample 7523Abi VNo ratings yet
- Detection and Classification of Power Quality Disturbances in The Supply To Induction Motor Using Wavelet Transform and Neural NetworksDocument9 pagesDetection and Classification of Power Quality Disturbances in The Supply To Induction Motor Using Wavelet Transform and Neural NetworksNadeem TunioNo ratings yet
- 2-15-1466427029-1. Electrical - Ijeee - Coordinated Effect of Power System Stabilizer - Rampreet ManjhiDocument10 pages2-15-1466427029-1. Electrical - Ijeee - Coordinated Effect of Power System Stabilizer - Rampreet Manjhirobertovm2002No ratings yet
- Comparison Agc Pid and Pss AvrDocument11 pagesComparison Agc Pid and Pss Avrtaitan.nguyen95No ratings yet
- Transient Stability Improvement of IEEE 9 Bus System With Shunt Facts Device StatcomDocument5 pagesTransient Stability Improvement of IEEE 9 Bus System With Shunt Facts Device StatcomBhavik PrajapatiNo ratings yet
- Detecting Power Grid Synchronization Failure System On Sensing Frequency or Voltage BeyondDocument5 pagesDetecting Power Grid Synchronization Failure System On Sensing Frequency or Voltage BeyondIJRASETPublicationsNo ratings yet
- Voltage Stability Improvement in Multi-Bus System Using Static Synchronous Series CompensatorDocument10 pagesVoltage Stability Improvement in Multi-Bus System Using Static Synchronous Series CompensatorIJRASETPublicationsNo ratings yet
- Psss and SVC Damping Controllers Design To Mitigate Low Frequency Oscillations Problem in A Multi-Machine Power SystemDocument10 pagesPsss and SVC Damping Controllers Design To Mitigate Low Frequency Oscillations Problem in A Multi-Machine Power SystemShiv TripathiNo ratings yet
- Design Guidelines To Avoid Bifurcation in A Series-Series Compensated Inductive Power Transfer SystemDocument11 pagesDesign Guidelines To Avoid Bifurcation in A Series-Series Compensated Inductive Power Transfer SystemCarlos Alexandre FerriNo ratings yet
- Voltage and Real Power Loss Analysis Incorporating CE-SSSC WithDocument18 pagesVoltage and Real Power Loss Analysis Incorporating CE-SSSC WithJEBARAJNo ratings yet
- Power System Stability Analysis by Applying PSS in ETAPDocument32 pagesPower System Stability Analysis by Applying PSS in ETAPSayed SaadNo ratings yet
- M.Tech SKA Thesis PDFDocument138 pagesM.Tech SKA Thesis PDFVishal RajputNo ratings yet
- Squid Proxy3.1Document16 pagesSquid Proxy3.1Norbac OrtizNo ratings yet
- Brochure ThermafilDocument6 pagesBrochure ThermafilliudifairNo ratings yet
- Intel Case StudyDocument30 pagesIntel Case Studydrchoubey786100% (1)
- Paper PresentationDocument21 pagesPaper PresentationShivpreet SharmaNo ratings yet
- AJM MODULE1 Admixtures BMCDocument31 pagesAJM MODULE1 Admixtures BMCfaheem momdNo ratings yet
- ProposalDocument10 pagesProposalbhaskarNo ratings yet
- Design of 50 MW SolarDocument14 pagesDesign of 50 MW Solarbhargav100% (1)
- Co-Trimoxazole TabletDocument2 pagesCo-Trimoxazole TabletYessi LopezNo ratings yet
- MS Permanent Noise BarrierDocument49 pagesMS Permanent Noise BarrierfadhilahNo ratings yet
- Design and Analysis of A Straight Bladed Vertical Axis Wind Turbine Blade Using Analytical and Numerical Techniques PDFDocument8 pagesDesign and Analysis of A Straight Bladed Vertical Axis Wind Turbine Blade Using Analytical and Numerical Techniques PDFOptimuz TsNo ratings yet
- Ourpdf PDFDocument86 pagesOurpdf PDFAlexander Atoche RodasNo ratings yet
- LicenceDocument3 pagesLicenceRazvan LunguNo ratings yet
- S01M02ed2 BasicsDocument29 pagesS01M02ed2 BasicsOtto KampbeltNo ratings yet
- ExpressJS ReferenceDocument246 pagesExpressJS ReferenceTr TzaraNo ratings yet
- Art of Programming Contest SE For Uva PDFDocument35 pagesArt of Programming Contest SE For Uva PDFgauravNo ratings yet
- Mech III & IV NMAMIT SyllabusDocument27 pagesMech III & IV NMAMIT SyllabusHn NayakNo ratings yet
- Continental Fuel Injection Contamnimation SB08-4ADocument4 pagesContinental Fuel Injection Contamnimation SB08-4AAMSNo ratings yet
- Audi TB 37-06-13Document5 pagesAudi TB 37-06-13Victor GabrielNo ratings yet
- Haide EeeeeeDocument32 pagesHaide Eeeeeeusmaniqbal15No ratings yet
- Nasa - Fully-Coupled Fluid-Structure Vibration Analysis Using NastranDocument84 pagesNasa - Fully-Coupled Fluid-Structure Vibration Analysis Using NastranMinseong KimNo ratings yet
- Ancillary Services in Power SystemsDocument5 pagesAncillary Services in Power SystemsNitakashi87No ratings yet
- Flight Manual: Preface 0.1Document90 pagesFlight Manual: Preface 0.1mehmeterkanNo ratings yet
- SEEPW Engineering BookDocument412 pagesSEEPW Engineering BookTudor MilchisNo ratings yet
- 05 EsightDocument12 pages05 EsightAbrar AhmadNo ratings yet
- Fluid Mechanics ch.2.2Document7 pagesFluid Mechanics ch.2.2A ALBALOSHINo ratings yet
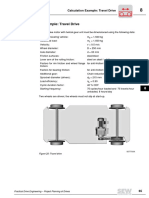
- Travel Drive ExampleDocument10 pagesTravel Drive Examplep-nicoNo ratings yet
- Marcadora Telesis Manual de MantenimientoDocument48 pagesMarcadora Telesis Manual de MantenimientoMago Ru100% (1)
- 8200-0859-01-A0 Intlx InstallConfig EN PDFDocument94 pages8200-0859-01-A0 Intlx InstallConfig EN PDFFrancisco Rodriguez MartinezNo ratings yet