
Fuzzy based Tie-Line and LFC of a Two-Area Interconnected System
Fuzzy based Tie-Line and LFC of a Two-Area Interconnected System
You might also like
- MANUAL de OPERACIÓN RPR 1650Document29 pagesMANUAL de OPERACIÓN RPR 1650Jorge Cruz Pool100% (3)
- 2019 - Comparison - Grid Forming Converter Control StrategiesDocument9 pages2019 - Comparison - Grid Forming Converter Control Strategiesemmasin90No ratings yet
- Problem StatementDocument9 pagesProblem StatementTauseef Gillani100% (1)
- Fabrication and Analysis of Portable Spot Welding MachineDocument7 pagesFabrication and Analysis of Portable Spot Welding MachineCrispNo ratings yet
- Load Frequency Control in Two Area Power System Using ANFISDocument10 pagesLoad Frequency Control in Two Area Power System Using ANFISSudhir Kumar100% (1)
- Frequency Responsive Demand in U.S. Western Power System ModelDocument5 pagesFrequency Responsive Demand in U.S. Western Power System ModelMortuzaNo ratings yet
- FinalDocument13 pagesFinallalit chola100% (1)
- Load Frequency Control in Three Area Power System Using Fuzzy Logic ControllerDocument6 pagesLoad Frequency Control in Three Area Power System Using Fuzzy Logic ControllerEditor IJTSRDNo ratings yet
- Two Area Power SystemDocument9 pagesTwo Area Power SystemMaths Side100% (1)
- Load Frequency Control For A Two-Area HVAC/HVDC Power System Using Hybrid Genetic Algorithm ControllerDocument4 pagesLoad Frequency Control For A Two-Area HVAC/HVDC Power System Using Hybrid Genetic Algorithm ControllerSudhir KumarNo ratings yet
- Droop Controller IEEEDocument5 pagesDroop Controller IEEEgmmmn172No ratings yet
- Gwo ManuscriptDocument5 pagesGwo ManuscriptMahendra KumarNo ratings yet
- Presentation 1Document30 pagesPresentation 1PROJECT POINTNo ratings yet
- Video PDFDocument4 pagesVideo PDFsayedNo ratings yet
- Load Frequency Control of Interconnected Hydro-Thermal Power System Using Conventional PI and Fuzzy Logic ControllerDocument7 pagesLoad Frequency Control of Interconnected Hydro-Thermal Power System Using Conventional PI and Fuzzy Logic ControllerBbbNo ratings yet
- Project FC 1Document8 pagesProject FC 1Patata PatatonaNo ratings yet
- Power System Stability & Control - Wide Area Damping ControllerDocument6 pagesPower System Stability & Control - Wide Area Damping ControllerPradeep MuppanaNo ratings yet
- Mahipal PPT 18.12.17Document84 pagesMahipal PPT 18.12.17Mahipal ChoudharyNo ratings yet
- 6658 ImportanceCoordinated KH 20140729 Web2Document12 pages6658 ImportanceCoordinated KH 20140729 Web2Nyanphyo AungNo ratings yet
- An Improved Voltage Control On Largescale Power System: A To ADocument9 pagesAn Improved Voltage Control On Largescale Power System: A To AJavier VargasNo ratings yet
- Robust Analysis of Decentralized Load Frequency Control For Multiarea Power SystemsDocument10 pagesRobust Analysis of Decentralized Load Frequency Control For Multiarea Power SystemsNoa Noa ReyNo ratings yet
- Chapter - 1 - Power System StructureDocument8 pagesChapter - 1 - Power System StructureMerera TaresaNo ratings yet
- Art N5 Luy p26-p29 PDFDocument4 pagesArt N5 Luy p26-p29 PDFsmprabu24317No ratings yet
- 2018-Optimal Control of Power of Two Interconnected MicrogridsDocument13 pages2018-Optimal Control of Power of Two Interconnected Microgridssupriyapallabi06No ratings yet
- Fuzzy Logic Based Automatic Generation Control of Interconnected Power System IJERTCONV4IS15012Document5 pagesFuzzy Logic Based Automatic Generation Control of Interconnected Power System IJERTCONV4IS15012bhargavkoriya837No ratings yet
- Sliding Droop Control For Distributed Generation in MicrogridsDocument10 pagesSliding Droop Control For Distributed Generation in MicrogridstiojejaoNo ratings yet
- Analysis On Various Optimization Techniques Used For Load Frequency Control in Power SystemDocument25 pagesAnalysis On Various Optimization Techniques Used For Load Frequency Control in Power SystemsuderNo ratings yet
- Nonlinear Adaptive Backstepping ControllDocument19 pagesNonlinear Adaptive Backstepping Controllprof zinssNo ratings yet
- Lectura ArticuloDocument6 pagesLectura ArticuloROBERTO CARLOS TORRES MELENDEZNo ratings yet
- Agc From EtapDocument8 pagesAgc From EtapKiran KarthikNo ratings yet
- Roblem Verview: N T ObsDocument2 pagesRoblem Verview: N T ObsOriginall LozanoNo ratings yet
- Neural Predictive ControllerDocument10 pagesNeural Predictive ControllerPrasad SolasaNo ratings yet
- Chapters 3Document54 pagesChapters 3Jspmani2040No ratings yet
- 1 s2.0 S1474667017670253 MainDocument7 pages1 s2.0 S1474667017670253 MainadrarwalidNo ratings yet
- 6372 Synchbased Ed DW GZ KGR 20100304Document10 pages6372 Synchbased Ed DW GZ KGR 20100304Siva Kumar ChNo ratings yet
- 1 s2.0 S0378779622008823 MainDocument17 pages1 s2.0 S0378779622008823 MainSouhila Rached ZINENo ratings yet
- Ijeet 06 08 005Document10 pagesIjeet 06 08 005IAEME PublicationNo ratings yet
- Power Flow Control of Power Systems Using UPFC Based On Adaptive Neuro FuzzyDocument6 pagesPower Flow Control of Power Systems Using UPFC Based On Adaptive Neuro FuzzyMichael KristiantoNo ratings yet
- Fuzzy Logic For Single AreaDocument11 pagesFuzzy Logic For Single Areaabata yohannesNo ratings yet
- Sundar Am 2011Document6 pagesSundar Am 2011Đông Huy BạchNo ratings yet
- 04578743-Damping Controller DesignDocument8 pages04578743-Damping Controller DesignbirsuNo ratings yet
- Load Frequency Control A Literature ReviewDocument18 pagesLoad Frequency Control A Literature ReviewMiracle UdodirimNo ratings yet
- A Novel Strategy For Three Phase Grid Connected Pulse Width Modulated VSI2018Document4 pagesA Novel Strategy For Three Phase Grid Connected Pulse Width Modulated VSI2018DrRitesh DashNo ratings yet
- Disturbance Observer Based Fractional-Order Integral Sliding Mode Frequency Control Strategy For Interconnected Power SystemDocument11 pagesDisturbance Observer Based Fractional-Order Integral Sliding Mode Frequency Control Strategy For Interconnected Power Systemjitenderkumar_goyal28No ratings yet
- Automatic Generation Control Using Artificial Neural Network Based Narma LDocument8 pagesAutomatic Generation Control Using Artificial Neural Network Based Narma LChaudary FarazNo ratings yet
- Interactive Distributed Generation Interface For Flexible Micro-Grid Operation in Smart Distribution SystemsDocument11 pagesInteractive Distributed Generation Interface For Flexible Micro-Grid Operation in Smart Distribution SystemsahmedrizwanchampNo ratings yet
- 1 s2.0 S0142061521002726 MainDocument29 pages1 s2.0 S0142061521002726 MainIrfanAhmedNo ratings yet
- A Generic Model of Two-Stage Grid-Connected PV Systems With Primary Frequency Response and Inertia EmulationDocument11 pagesA Generic Model of Two-Stage Grid-Connected PV Systems With Primary Frequency Response and Inertia Emulationsiraj udinNo ratings yet
- State Observers Applied: Fernando Lozano-I, Student-Member, IEEEDocument2 pagesState Observers Applied: Fernando Lozano-I, Student-Member, IEEEOriginall LozanoNo ratings yet
- Paper 4Document3 pagesPaper 4electrician.powersystemsNo ratings yet
- Session 5Document64 pagesSession 5karen dejoNo ratings yet
- Assignment Power SystemDocument11 pagesAssignment Power Systemdhananjay656No ratings yet
- Electrical Power and Energy Systems: Swati Sondhi, Yogesh V. HoteDocument13 pagesElectrical Power and Energy Systems: Swati Sondhi, Yogesh V. Hoteshekhar yadavNo ratings yet
- Dynamic Voltage Support For Low-Voltage Ride-Through Operation in Single-Phase Grid-Connected Photovoltaic SystemsDocument10 pagesDynamic Voltage Support For Low-Voltage Ride-Through Operation in Single-Phase Grid-Connected Photovoltaic Systemskhannoussi kamiliaNo ratings yet
- 2013c - Sliding Mode Control Based Power Balancing For Grid ConnectedDocument6 pages2013c - Sliding Mode Control Based Power Balancing For Grid ConnectedP. K. SahuNo ratings yet
- Module 1Document9 pagesModule 1Nikhilesh RainaNo ratings yet
- Kumar 2020Document6 pagesKumar 2020Babou khawlaNo ratings yet
- Load Frequency Control in Power System: Md. Al-Amin Sarker and A K M Kamrul HasanDocument8 pagesLoad Frequency Control in Power System: Md. Al-Amin Sarker and A K M Kamrul Hasanmasoud aliNo ratings yet
- Chapter 7Document19 pagesChapter 7RonaldNo ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- Methods for Increasing the Quality and Reliability of Power System Using FACTS DevicesFrom EverandMethods for Increasing the Quality and Reliability of Power System Using FACTS DevicesNo ratings yet
- A Comprehensive Review on the Therapeutic Potential of PectinDocument6 pagesA Comprehensive Review on the Therapeutic Potential of PectinInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Quizlet's Usefulness for Vocabulary Learning: Perceptions of High-Level and Low-Level Chinese College EFL LearnersDocument5 pagesQuizlet's Usefulness for Vocabulary Learning: Perceptions of High-Level and Low-Level Chinese College EFL LearnersInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A Rare Complication: Cardiac Arrest and Pulmonary Embolism in Polyarteritis NodosaDocument5 pagesA Rare Complication: Cardiac Arrest and Pulmonary Embolism in Polyarteritis NodosaInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Forecasting PM10 Concentrations Using Artificial Neural Network in Imphal CityDocument10 pagesForecasting PM10 Concentrations Using Artificial Neural Network in Imphal CityInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Impact of Integrated Border Security System on Human Trafficking in Bangladesh: The Mediating Effect of the Use of Advanced TechnologyDocument12 pagesThe Impact of Integrated Border Security System on Human Trafficking in Bangladesh: The Mediating Effect of the Use of Advanced TechnologyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Application of Project Management using CPM (Critical Path Method) and Pert (Project Evaluation and Review Technique) in the Nava House Bekasi Cluster Housing Development ProjectDocument12 pagesApplication of Project Management using CPM (Critical Path Method) and Pert (Project Evaluation and Review Technique) in the Nava House Bekasi Cluster Housing Development ProjectInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Quality Control to Reduce Appearance Defects at PT. Musical InstrumentDocument11 pagesQuality Control to Reduce Appearance Defects at PT. Musical InstrumentInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Application of the Economic Order Quantity (EOQ) Method on the Supply of Chemical Materials in the Laboratory of PT. Fajar Surya Wisesa TbkDocument15 pagesApplication of the Economic Order Quantity (EOQ) Method on the Supply of Chemical Materials in the Laboratory of PT. Fajar Surya Wisesa TbkInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Analysis of Carton Packaging Quality Control Using Statistical Quality Control Methods at PT XYZDocument10 pagesAnalysis of Carton Packaging Quality Control Using Statistical Quality Control Methods at PT XYZInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Visitor Perception Related to the Quality of Service in Todo Tourism VillageDocument10 pagesVisitor Perception Related to the Quality of Service in Todo Tourism VillageInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Entrepreneurial Adult Education as a Catalyst for Youth Employability in Disadvantaged AreasDocument9 pagesEntrepreneurial Adult Education as a Catalyst for Youth Employability in Disadvantaged AreasInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A New Model of Rating to Evaluate Start-ups in Emerging Indian MarketDocument7 pagesA New Model of Rating to Evaluate Start-ups in Emerging Indian MarketInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Enhancing Estimating the Charge Level in Electric Vehicles: Leveraging Force Fluctuation and Regenerative Braking DataDocument6 pagesEnhancing Estimating the Charge Level in Electric Vehicles: Leveraging Force Fluctuation and Regenerative Braking DataInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A Proof of Concept Using BLE to Optimize Patients Turnaround Time (PTAT) in Health CareDocument14 pagesA Proof of Concept Using BLE to Optimize Patients Turnaround Time (PTAT) in Health CareInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Health Care - An Android Application Implementation and Analyzing user Experience Using PythonDocument7 pagesHealth Care - An Android Application Implementation and Analyzing user Experience Using PythonInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Gravity Investigations Applied to the Geological Framework Study of the Mambasa Territory in Democratic Republic of CongoDocument9 pagesGravity Investigations Applied to the Geological Framework Study of the Mambasa Territory in Democratic Republic of CongoInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Intrusion Detection System with Ensemble Machine Learning Approaches using VotingClassifierDocument4 pagesIntrusion Detection System with Ensemble Machine Learning Approaches using VotingClassifierInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Crop Monitoring System with Water Moisture Levels Using ControllerDocument8 pagesCrop Monitoring System with Water Moisture Levels Using ControllerInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Naturopathic Approaches to Relieving Constipation: Effective Natural Treatments and TherapiesDocument10 pagesNaturopathic Approaches to Relieving Constipation: Effective Natural Treatments and TherapiesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Developing Digital Fluency in Early Education: Narratives of Elementary School TeachersDocument11 pagesDeveloping Digital Fluency in Early Education: Narratives of Elementary School TeachersInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Synthetic and Natural Vitamin C Modulation of Leaded Paint-Induced Nephrotoxicity of Automobile Painters in Ile-Ife, Nigeria.Document21 pagesSynthetic and Natural Vitamin C Modulation of Leaded Paint-Induced Nephrotoxicity of Automobile Painters in Ile-Ife, Nigeria.International Journal of Innovative Science and Research TechnologyNo ratings yet
- Optimizing Bio-Implant Materials for Femur Bone Replacement:A Multi-Criteria Analysis and Finite Element StudyDocument5 pagesOptimizing Bio-Implant Materials for Femur Bone Replacement:A Multi-Criteria Analysis and Finite Element StudyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A Study to Assess the Effectiveness of Bronchial Hygiene Therapy (BHT) on Clinical Parameters among Mechanically Ventilated Patients in Selected Hospitals at ErodeDocument7 pagesA Study to Assess the Effectiveness of Bronchial Hygiene Therapy (BHT) on Clinical Parameters among Mechanically Ventilated Patients in Selected Hospitals at ErodeInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Year Wise Analysis and Prediction of Gold RatesDocument8 pagesYear Wise Analysis and Prediction of Gold RatesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Government's Role in DMO-based Urban Tourism in Kayutangan area of Malang cityDocument8 pagesThe Government's Role in DMO-based Urban Tourism in Kayutangan area of Malang cityInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Design and Implementation of Software-Defined ReceiverDocument8 pagesDesign and Implementation of Software-Defined ReceiverInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Fahfi/Mochaina Illegal Gambling Activities and its Average Turnover within Limpopo ProvinceDocument8 pagesFahfi/Mochaina Illegal Gambling Activities and its Average Turnover within Limpopo ProvinceInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Inclusive Leadership in the South African Police Service (SAPS)Document26 pagesInclusive Leadership in the South African Police Service (SAPS)International Journal of Innovative Science and Research TechnologyNo ratings yet
- Effectiveness of Organizing Crossing Transport Services in the Maritime Area of Riau Islands ProvinceDocument10 pagesEffectiveness of Organizing Crossing Transport Services in the Maritime Area of Riau Islands ProvinceInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Income Diversification of Rural Households in Bangladesh (2022-23)Document5 pagesIncome Diversification of Rural Households in Bangladesh (2022-23)International Journal of Innovative Science and Research TechnologyNo ratings yet
- BT f5 Bab 6 DLP NniDocument43 pagesBT f5 Bab 6 DLP NniNURUL NADIAH BINTI IDRIS KPM-GuruNo ratings yet
- 0014 020 en 02Document13 pages0014 020 en 02Taufik RachmanNo ratings yet
- Furuno Speed Log DS-80Document40 pagesFuruno Speed Log DS-80psad80No ratings yet
- GA A75M D2H R101 SchematicDocument29 pagesGA A75M D2H R101 SchematicmodohoiNo ratings yet
- Fast Track Troubleshooting: Downloaded From Manuals Search EngineDocument6 pagesFast Track Troubleshooting: Downloaded From Manuals Search EngineIsir isirNo ratings yet
- Ricoh FT 3113-3313-3613 SMDocument295 pagesRicoh FT 3113-3313-3613 SMDragan NedicNo ratings yet
- Viko GPDDocument2 pagesViko GPDvictorharijantoNo ratings yet
- A1800 Meter Installation Instructions PDFDocument12 pagesA1800 Meter Installation Instructions PDFandresNo ratings yet
- Diagnostico Backup Switch 320D GKLDocument11 pagesDiagnostico Backup Switch 320D GKLanton100% (2)
- Mathematical ProblemDocument3 pagesMathematical ProblemMrinmoy Rahman100% (1)
- Oscillator Design and Computer SimulationDocument317 pagesOscillator Design and Computer Simulationwaynecard71No ratings yet
- EYR207Document8 pagesEYR207Gabor KomuvesNo ratings yet
- Handout For Marpow Week 5 6Document13 pagesHandout For Marpow Week 5 6AJ Bacarisas RochaNo ratings yet
- TK 3000 ServiceDocument39 pagesTK 3000 Servicejulio brachoNo ratings yet
- Mitsubishi-Troubleshooting Guide For ProjectorsDocument8 pagesMitsubishi-Troubleshooting Guide For ProjectorsImthiyas AhmedNo ratings yet
- Standard Technical Specifications For Electrical Works: 14 M Height Street Lighting Poles Including AccessoriesDocument11 pagesStandard Technical Specifications For Electrical Works: 14 M Height Street Lighting Poles Including AccessoriesWael AlmassriNo ratings yet
- E560 CMG10 DBDocument5 pagesE560 CMG10 DBHoang NguyenNo ratings yet
- Znshine Installation Manual Light Double Glass Half CutDocument14 pagesZnshine Installation Manual Light Double Glass Half CutJoao FreitasNo ratings yet
- Dr. HENG, Chun Huat Teaching Assistant Dr. BA MyintDocument7 pagesDr. HENG, Chun Huat Teaching Assistant Dr. BA MyintNixNo ratings yet
- Quadxs 2cDocument2 pagesQuadxs 2cMd Mansoor100% (2)
- Introduction To Basic ConceptsDocument19 pagesIntroduction To Basic ConceptsM Hussnain JavedNo ratings yet
- 2013 Coa CMDocument5 pages2013 Coa CMUriti Venkata Naga KishoreNo ratings yet
- TVH Battery Connector & Intercell ConnectorDocument72 pagesTVH Battery Connector & Intercell ConnectorMelwyn FernandesNo ratings yet
- SMCDocument1 pageSMCIsai AnguianoNo ratings yet
- Lab Activity 1: Faraday'S Law: ObjectivesDocument5 pagesLab Activity 1: Faraday'S Law: ObjectivesJim Lester AmodiaNo ratings yet
- Inncom 2018 Catalog Reva 02-18Document51 pagesInncom 2018 Catalog Reva 02-18TrầnTrungHiếuNo ratings yet
- Easypic4 Manual v100Document34 pagesEasypic4 Manual v100Joseph Abraham AC100% (1)






















































































































Volume 9, Issue 6, June – 2024 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165 https://doi.org/10.38124/ijisrt/IJISRT24JUN1023
Fuzzy based Tie-Line and LFC of a
Two-Area Interconnected System
Pelluri Shravan 1; T. Sreenu2; Talada Santhosh3
PG Student1; Assistant Professor 2,3
Dept of Electrical and Electronics Engineering
Visakha Institute of Engineering & Technology Visakhapatnam, India
Abstract:- In order to restore the balance between load and essentially shut down the whole northern region, affecting
generation in each control region, the load-frequency control all eight states. This resulted from the traditional
(LFC) uses speed control. Reducing the steady state error and controllers' poor control measures, and some states kept
transient deviations to zero in advance is the main goal of using more electricity than they required in spite of the
LFC. This study investigated LFC for two area systems using
fuzzy inference system (FIS) and conventional controllers. The
warnings. An adaptive control system is required to
results of the two controllers are compared using the recognize changes in load and stabilize the frequency
MATLAB/Simulink application. The findings are displayed deviation. In this study, an autonomous control action is
from comparisons between fuzzy inference systems and provided by a fuzzy inference system (FIS) technology.
conventional controllers. After contrasting the recommended controller with the
conventional controller, the results are shown.
Keywords:- Fuzzy Inference System (FIS), Conventional
Controller, and Load Frequency Control. II. SINGLE AREA POWER SYSTEM
I. INTRODUCTION A. Modelling of System Model
Modern power systems are divided into a number of
These days, producing electricity is essential due to categories. For example, the Eastern, Western, Northern,
the increasing demand for it. The dynamic behavior of the Southern, and North-Eastern grids are among the five
system depends on perturbations and modifications to the regional grids in India. Every one of these regional areas
operating point. The quality of the energy generated in has a common connection to the regions around it.
power plants is determined by the system's output, which Transmission lines that connect one region to its
needs to maintain the scheduled power and have a neighboring one are known as tie-lines. The purpose of
consistent frequency. Thus, load frequency control, or LFC, these tie-lines is to divide power between two locations. As
is essential to the power system's capacity to produce the name implies, load frequency control regulates the
consistent, high-grade electricity. While traditional power flow between different sites while keeping the
controllers such as PD, PID, and PI can offer control frequency constant.
actions for a single operating condition, in practice, the
parameters are never static. Setting up the require
adjustments to achieve zero frequency variation is so
difficult. Therefore, providing automatic correction is
crucial. Load frequency controllers have been designed
using a range of control algorithms to enhance dynamic
performance. Conventional controllers are the most
common and widely used of the several types of load
frequency controllers. Conventional controllers generate a
large amount of frequency variation despite being simple to
design. Most state feedback controllers based on linear
optimal control theory have been provided in order to
increase performance. Because fixed gain controllers are
Fig 1: Inter Connected Power System
designed for nominal operating settings, they are unable to
provide the best control performance throughout a range of
As long as "Δ𝑃𝑟𝑒ƒ" is set at zero, the system
operating conditions. Thus, to keep system performance
frequency will increase as the load reduces.
near maximum, it is desirable to keep an eye on operating
conditions and compute the control using the most recent
parameters. Adaptive controllers offer self-adjusting gain
setting. It is commonly known that the load frequency
control problem led to the collapse of the Northern grid.
This is the outcome of both excessive generation and
excessive grid demand. It resulted in a blackout that
IJISRT24JUN1023 www.ijisrt.com 1562
Volume 9, Issue 6, June – 2024 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165 https://doi.org/10.38124/ijisrt/IJISRT24JUN1023
A two area electricity system is made up of tie-lines
connecting two single area systems. It's crucial to create a
mathematical model of the system before coming up with
any control schemes. It is thought that each control zone
might be conveniently represented by an equivalent turbine,
speed controlling system, generator, and load. The block
diagram for a single area power system is shown in Figure
2.Each area of a two-area power system has several
generators that are interconnected to form a cohesive group.
As a result, the generators in the power system should all
respond to changes in load simultaneously. One such
coherent area where it is expected that the frequency will be
Fig 2: Single Area Power System consistent in both static and dynamic conditions is the
control region. To minimize the frequency variation,
Likewise, frequency may decrease as load increases. however, a separate controller (PID) is used in this system.
Maintaining a steady frequency is crucial to guarantee that The PI Controller might offer the best frequency deviation
Δf=0. Power is scheduled to be transferred between the control action in a single operating condition. When the
different tie lines; for example, region "I" might import a working range is large, the PID Controllers are unable to
second specified quantity of power from area "k" and introduce frequency variation. This difficulty is avoided by
export a predefined amount to area "j." However, it is the Fuzzy Inference System (FIS).
expected that area I will independently absorb any
variations in load, including higher generation to III. TEO AREA LOAD FREQUENCY CONTROL
accommodate greater load in the area or lower generation
when the area's load demand has fallen. The following The conventional AGC design has two control loops.
goals of load frequency control (LFC) are thus necessary Although frequency variation is reduced, it is not entirely
for area "I" to continue fulfilling its duties to areas "j": removed by the primary control loop, which uses the
governor's self-regulating capabilities to control the
Retain the frequency constant (Δf=0) in the face of load frequency. Furthermore, the feedback control loop has a
variations. Every area needs to be able to adapt to controller that may be able to reduce the frequency
changes in load so that the frequency stays constant. deviation through the use of conventional proportional
Every region must keep the tie-line power flow at the integral control action. The major objective of feedback
predetermined level. control is to restore the balance between generation and
load in each control region after a disturbance, thereby
The first step in the Load Frequency Control is to form the maintaining the tie-line power flows and system frequency
area control error (ACE) that is defined as at their predefined values. The load frequency control block
diagram for a two-area linked power system is shown in
𝐴𝐶𝐸=(𝑃𝑡i𝑒−𝑃)+𝐵ƒΔƒ=Δ𝑃𝑡i𝑒+𝐵ƒΔ (1) Figure 3.
Where Ptie and Psch are the tie-line power and
scheduled power through tie-line respectively and the
constant Bf is called the frequency bias constant. The
change in the reference of the power setting Δ𝑃𝑟𝑒ƒi of the
area I is then obtained by feedback of the ACE through an
integral controller of the form
Δ𝑃𝑟𝑒ƒi=−𝐾i ∫𝐴𝐶𝐸𝑑𝑡 (2)
Where Ki is the integral gain.
If there is little net power flow out of a region, a drop
in frequency, or both, the ACE is negative. To fulfill the
load demand in this scenario, the generation must be raised.
You can do this by raising ΔPref,i. The inverse relationship
between ΔPref,i and ACE is explained by this negative
symbol. Each area's control center keeps an eye on the
frequency and tie-line power flow. Upon computing the
ACE and obtaining ΔPref,i from Equation (2), directives
are issued to the several turbine-generator controllers to
modify their reference power settings.
IJISRT24JUN1023 www.ijisrt.com 1563
Volume 9, Issue 6, June – 2024 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165 https://doi.org/10.38124/ijisrt/IJISRT24JUN1023
Fig 3: Two-Area Inter Connected Power System
The ACE refers to the frequency shift in a single-area IV. PID CONTROLLER
scenario. In an integral-control loop with ACE, the steady
state error in frequency will be zero, or V_st = 0. In a two- Conventional PID Controller on i-th AreaThe control
area example, ACE is the linear combination of the input 𝑈i is constructed as follows:
frequency change and the tie-line power change. To obtain 𝑇 T
the steady-state tie-line power zero (i.e., Δ𝑃𝑡i𝑒= 0), a 𝑈i = −𝐾i ∫ 𝐴𝐶𝐸i 𝑑𝑡 = − ∫ (Δ𝑃𝑡i𝑒 i + 𝐵iΔ𝐹i) (3)
second integrator loop for each region must be added in
addition to the integral frequency loop in order to integrate Taking the derivative of the equation yields
the incremental tie-line power signal and send it back to the 𝑈i = −𝐾i(𝐴𝐶𝐸i) = −𝐾i(Δ𝑃𝑡i𝑒 i + 𝐵i Δ𝐹i) (4)
speed changer.
The constants 𝐾i(1, 2) are the gain of the integrator. It
There requirements of the integral control action are: is observed that for decrease in both frequency and tie-line
power generation should decrease, i.e., if the ACE is
ACE must be equal to zero atleast one time in all 10- negative, the speed-changer position decreases and hence
minute periods. Average deviation of ACE from zero must the power generation should decrease, i.e., if the ACE is
be within specified limits based on percentage of system negative, then the area should increase its generation, so
generation forall10-minute periods. negative is assigned to the right-hand side term.
V. FUZZY INTERFACE
The most popular industrial controller is the PID
controller because of its simple construction and effective
functioning. Traditional PID controllers, however, are
usually ineffectual when it comes to controlling higher
order, time delay, non-linear, complex, uncertain, or
systems with intricate mathematical models because of
their linear architecture.
IJISRT24JUN1023 www.ijisrt.com 1564
Volume 9, Issue 6, June – 2024 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165 https://doi.org/10.38124/ijisrt/IJISRT24JUN1023
Fig.4. Structure of Fuzzy Logic controller
VI. SIMULATION AND RESULTS the frequency regulation of a two-area load without a
controller. with the 10% variation (growth) in the area's
A. Simulation Model for Two-Area Load Frequency load.1 illustrates the impact on both the area's frequency
Control and area. Moreover, it illustrates the effect on the area. tie
The two area load frequency control simulation block line power and two frequencies. Both the area1,2 and tie
diagram was created in MATLAB using the parameters line power Ptie1,2 frequency responses in their transient
listed in the table and modeled using Fig. 5. and the and stable states exhibit some instability. The tie-line power
simulation provides the findings for frequency and tie line exhibits more oscillations in Fig. 6. as a result of the abrupt
power changes in response to load changes. Figure 6 shows shift in load.
Fig 5: Simulink Model of Two Area Load Frequency Control with Conventional PID Controller
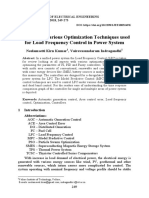
B. Simulation Results Without Controller of the control zones of 1%. With no controller, Figure 6.
The power system frequency will fluctuate illustrates the significant oscillations in its transient
proportionately from its typical steady state operating conditions and the steady state error of -1.378.
circumstances as a result of an abrupt change in load in one
IJISRT24JUN1023 www.ijisrt.com 1565
Volume 9, Issue 6, June – 2024 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165 https://doi.org/10.38124/ijisrt/IJISRT24JUN1023
Fig 6: Two-Area Load Frequency Control Without Controller
C. Simulation Results with PID Controller
Figure .7 shows the response of two area load
frequency control with PID controller which makes the
steady state error is zero and also shows good control over
the transient state that reduce the oscillations in transient
conditions.
Fig 7: Response of Two Area Load Frequency
Control with PID Controller
D. Simulation of Two Area Load Frequency Fuzzy
Controller
Fig 8: Fuzzy Rule Base Membership Functions
IJISRT24JUN1023 www.ijisrt.com 1566
Volume 9, Issue 6, June – 2024 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165 https://doi.org/10.38124/ijisrt/IJISRT24JUN1023
The process design of fuzzy if-then rule knowledge output control input (CI) are used for two region LFC:
bases and membership functions for inputs and outputs are frequency error (E) and change in frequency error (CE). A
crucial components of fuzzy logic control system designs. three-member and a seven-member rule base are developed
When it comes to fuzzy logic control, they are crucial. Fig. for this purpose. Tables display the rule foundation for the
8 shows the fundamental architecture of the fuzzy logic seven membership functions.
controller. Two inputs for the fuzzy controller and one
Fig 9: Fuzzy Controller Design
The fuzzy logic based control system has been studied eliminating steady state error. Fuzzy logic membership
by simulation in order to validate the design and to evaluate functions, which are used by a novel kind of controller
the performance. Simulation result gotten by a fuzzy logic called a fuzzy logic controller, are transient.
controller which gives good performance in a constant load
case .When one need only design the FLC to provide REFERENCES
control command. It is seen that FLC provides faster
response and less overshoot. Fig.10. Shows the output [1]. Modern Power Systems Control and Operation”
response two area LFC with FLC Kothari, DP and I J Nagrath, Power System
Engineering, 2nd edn, Tata ... Debs, A S, KAP, New
E. Two Area Load Frequency Control Results with FUZZY York, 1988.
Controller [2]. “Power system analysis” by Haadi Sadat, Tata
Fuzzy controller gives better response in both McGraw- illcompany’s Inc. 1999
transient and steady state period: [3]. “Electrical Power System Analysis”. Front Cover
·Sivanagaraju, B. V. Rami Reddy. Firewall Media,
Jan 1, 2007- 345 pages.
[4]. “Power Generation, Operation and Control”, 3rd
Edition Allen J. Wood, Bruce F. Wollenberg, Gerald
B. Sheble ISBN: 978-0-471-79055-6 656 pages
October 2013
[5]. “Tuning of PID controller using particle swarm
optimization” Mahmud Iwan Solihin, Lee Fook
Tack and Moey Leap Kean 2011
[6]. “Load frequency control using optimal PID
controller for Non-Reheated thermal power system
with TCPS units” A.R.Rajkumar, T.Jayabharathi,,
june-2012.
[7]. “Automatic load frequency control of two area
Fig 10: Output response two area LFC with FLC power system with conventional and fuzzy logic
control” Nilay N.Shah, Anant.R.Suthar, nov-2012.
VII. CONCLUSION [8]. “Load frequency control of interconnected hydro
power system using fuzzy and conventional PI
In this study, MATLAB simulation was used to mimic controllers” Sachin Khajuria, Jaspreet Kaur, oct.
the two area load frequency control. The tie line power 2012.
varies as a result of an abrupt shift (increase) in load. By
boosting steady state response, integral controllers lower tie
line power oscillations and guarantee that steady state error
equals zero. A derivative controller reduces transient
oscillations. The best controller is the classic PID
controller, which is coupled in series with the tie line and
reduces transient tie line power oscillation while
IJISRT24JUN1023 www.ijisrt.com 1567
You might also like
- MANUAL de OPERACIÓN RPR 1650Document29 pagesMANUAL de OPERACIÓN RPR 1650Jorge Cruz Pool100% (3)
- 2019 - Comparison - Grid Forming Converter Control StrategiesDocument9 pages2019 - Comparison - Grid Forming Converter Control Strategiesemmasin90No ratings yet
- Problem StatementDocument9 pagesProblem StatementTauseef Gillani100% (1)
- Fabrication and Analysis of Portable Spot Welding MachineDocument7 pagesFabrication and Analysis of Portable Spot Welding MachineCrispNo ratings yet
- Load Frequency Control in Two Area Power System Using ANFISDocument10 pagesLoad Frequency Control in Two Area Power System Using ANFISSudhir Kumar100% (1)
- Frequency Responsive Demand in U.S. Western Power System ModelDocument5 pagesFrequency Responsive Demand in U.S. Western Power System ModelMortuzaNo ratings yet
- FinalDocument13 pagesFinallalit chola100% (1)
- Load Frequency Control in Three Area Power System Using Fuzzy Logic ControllerDocument6 pagesLoad Frequency Control in Three Area Power System Using Fuzzy Logic ControllerEditor IJTSRDNo ratings yet
- Two Area Power SystemDocument9 pagesTwo Area Power SystemMaths Side100% (1)
- Load Frequency Control For A Two-Area HVAC/HVDC Power System Using Hybrid Genetic Algorithm ControllerDocument4 pagesLoad Frequency Control For A Two-Area HVAC/HVDC Power System Using Hybrid Genetic Algorithm ControllerSudhir KumarNo ratings yet
- Droop Controller IEEEDocument5 pagesDroop Controller IEEEgmmmn172No ratings yet
- Gwo ManuscriptDocument5 pagesGwo ManuscriptMahendra KumarNo ratings yet
- Presentation 1Document30 pagesPresentation 1PROJECT POINTNo ratings yet
- Video PDFDocument4 pagesVideo PDFsayedNo ratings yet
- Load Frequency Control of Interconnected Hydro-Thermal Power System Using Conventional PI and Fuzzy Logic ControllerDocument7 pagesLoad Frequency Control of Interconnected Hydro-Thermal Power System Using Conventional PI and Fuzzy Logic ControllerBbbNo ratings yet
- Project FC 1Document8 pagesProject FC 1Patata PatatonaNo ratings yet
- Power System Stability & Control - Wide Area Damping ControllerDocument6 pagesPower System Stability & Control - Wide Area Damping ControllerPradeep MuppanaNo ratings yet
- Mahipal PPT 18.12.17Document84 pagesMahipal PPT 18.12.17Mahipal ChoudharyNo ratings yet
- 6658 ImportanceCoordinated KH 20140729 Web2Document12 pages6658 ImportanceCoordinated KH 20140729 Web2Nyanphyo AungNo ratings yet
- An Improved Voltage Control On Largescale Power System: A To ADocument9 pagesAn Improved Voltage Control On Largescale Power System: A To AJavier VargasNo ratings yet
- Robust Analysis of Decentralized Load Frequency Control For Multiarea Power SystemsDocument10 pagesRobust Analysis of Decentralized Load Frequency Control For Multiarea Power SystemsNoa Noa ReyNo ratings yet
- Chapter - 1 - Power System StructureDocument8 pagesChapter - 1 - Power System StructureMerera TaresaNo ratings yet
- Art N5 Luy p26-p29 PDFDocument4 pagesArt N5 Luy p26-p29 PDFsmprabu24317No ratings yet
- 2018-Optimal Control of Power of Two Interconnected MicrogridsDocument13 pages2018-Optimal Control of Power of Two Interconnected Microgridssupriyapallabi06No ratings yet
- Fuzzy Logic Based Automatic Generation Control of Interconnected Power System IJERTCONV4IS15012Document5 pagesFuzzy Logic Based Automatic Generation Control of Interconnected Power System IJERTCONV4IS15012bhargavkoriya837No ratings yet
- Sliding Droop Control For Distributed Generation in MicrogridsDocument10 pagesSliding Droop Control For Distributed Generation in MicrogridstiojejaoNo ratings yet
- Analysis On Various Optimization Techniques Used For Load Frequency Control in Power SystemDocument25 pagesAnalysis On Various Optimization Techniques Used For Load Frequency Control in Power SystemsuderNo ratings yet
- Nonlinear Adaptive Backstepping ControllDocument19 pagesNonlinear Adaptive Backstepping Controllprof zinssNo ratings yet
- Lectura ArticuloDocument6 pagesLectura ArticuloROBERTO CARLOS TORRES MELENDEZNo ratings yet
- Agc From EtapDocument8 pagesAgc From EtapKiran KarthikNo ratings yet
- Roblem Verview: N T ObsDocument2 pagesRoblem Verview: N T ObsOriginall LozanoNo ratings yet
- Neural Predictive ControllerDocument10 pagesNeural Predictive ControllerPrasad SolasaNo ratings yet
- Chapters 3Document54 pagesChapters 3Jspmani2040No ratings yet
- 1 s2.0 S1474667017670253 MainDocument7 pages1 s2.0 S1474667017670253 MainadrarwalidNo ratings yet
- 6372 Synchbased Ed DW GZ KGR 20100304Document10 pages6372 Synchbased Ed DW GZ KGR 20100304Siva Kumar ChNo ratings yet
- 1 s2.0 S0378779622008823 MainDocument17 pages1 s2.0 S0378779622008823 MainSouhila Rached ZINENo ratings yet
- Ijeet 06 08 005Document10 pagesIjeet 06 08 005IAEME PublicationNo ratings yet
- Power Flow Control of Power Systems Using UPFC Based On Adaptive Neuro FuzzyDocument6 pagesPower Flow Control of Power Systems Using UPFC Based On Adaptive Neuro FuzzyMichael KristiantoNo ratings yet
- Fuzzy Logic For Single AreaDocument11 pagesFuzzy Logic For Single Areaabata yohannesNo ratings yet
- Sundar Am 2011Document6 pagesSundar Am 2011Đông Huy BạchNo ratings yet
- 04578743-Damping Controller DesignDocument8 pages04578743-Damping Controller DesignbirsuNo ratings yet
- Load Frequency Control A Literature ReviewDocument18 pagesLoad Frequency Control A Literature ReviewMiracle UdodirimNo ratings yet
- A Novel Strategy For Three Phase Grid Connected Pulse Width Modulated VSI2018Document4 pagesA Novel Strategy For Three Phase Grid Connected Pulse Width Modulated VSI2018DrRitesh DashNo ratings yet
- Disturbance Observer Based Fractional-Order Integral Sliding Mode Frequency Control Strategy For Interconnected Power SystemDocument11 pagesDisturbance Observer Based Fractional-Order Integral Sliding Mode Frequency Control Strategy For Interconnected Power Systemjitenderkumar_goyal28No ratings yet
- Automatic Generation Control Using Artificial Neural Network Based Narma LDocument8 pagesAutomatic Generation Control Using Artificial Neural Network Based Narma LChaudary FarazNo ratings yet
- Interactive Distributed Generation Interface For Flexible Micro-Grid Operation in Smart Distribution SystemsDocument11 pagesInteractive Distributed Generation Interface For Flexible Micro-Grid Operation in Smart Distribution SystemsahmedrizwanchampNo ratings yet
- 1 s2.0 S0142061521002726 MainDocument29 pages1 s2.0 S0142061521002726 MainIrfanAhmedNo ratings yet
- A Generic Model of Two-Stage Grid-Connected PV Systems With Primary Frequency Response and Inertia EmulationDocument11 pagesA Generic Model of Two-Stage Grid-Connected PV Systems With Primary Frequency Response and Inertia Emulationsiraj udinNo ratings yet
- State Observers Applied: Fernando Lozano-I, Student-Member, IEEEDocument2 pagesState Observers Applied: Fernando Lozano-I, Student-Member, IEEEOriginall LozanoNo ratings yet
- Paper 4Document3 pagesPaper 4electrician.powersystemsNo ratings yet
- Session 5Document64 pagesSession 5karen dejoNo ratings yet
- Assignment Power SystemDocument11 pagesAssignment Power Systemdhananjay656No ratings yet
- Electrical Power and Energy Systems: Swati Sondhi, Yogesh V. HoteDocument13 pagesElectrical Power and Energy Systems: Swati Sondhi, Yogesh V. Hoteshekhar yadavNo ratings yet
- Dynamic Voltage Support For Low-Voltage Ride-Through Operation in Single-Phase Grid-Connected Photovoltaic SystemsDocument10 pagesDynamic Voltage Support For Low-Voltage Ride-Through Operation in Single-Phase Grid-Connected Photovoltaic Systemskhannoussi kamiliaNo ratings yet
- 2013c - Sliding Mode Control Based Power Balancing For Grid ConnectedDocument6 pages2013c - Sliding Mode Control Based Power Balancing For Grid ConnectedP. K. SahuNo ratings yet
- Module 1Document9 pagesModule 1Nikhilesh RainaNo ratings yet
- Kumar 2020Document6 pagesKumar 2020Babou khawlaNo ratings yet
- Load Frequency Control in Power System: Md. Al-Amin Sarker and A K M Kamrul HasanDocument8 pagesLoad Frequency Control in Power System: Md. Al-Amin Sarker and A K M Kamrul Hasanmasoud aliNo ratings yet
- Chapter 7Document19 pagesChapter 7RonaldNo ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- Methods for Increasing the Quality and Reliability of Power System Using FACTS DevicesFrom EverandMethods for Increasing the Quality and Reliability of Power System Using FACTS DevicesNo ratings yet
- A Comprehensive Review on the Therapeutic Potential of PectinDocument6 pagesA Comprehensive Review on the Therapeutic Potential of PectinInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Quizlet's Usefulness for Vocabulary Learning: Perceptions of High-Level and Low-Level Chinese College EFL LearnersDocument5 pagesQuizlet's Usefulness for Vocabulary Learning: Perceptions of High-Level and Low-Level Chinese College EFL LearnersInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A Rare Complication: Cardiac Arrest and Pulmonary Embolism in Polyarteritis NodosaDocument5 pagesA Rare Complication: Cardiac Arrest and Pulmonary Embolism in Polyarteritis NodosaInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Forecasting PM10 Concentrations Using Artificial Neural Network in Imphal CityDocument10 pagesForecasting PM10 Concentrations Using Artificial Neural Network in Imphal CityInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Impact of Integrated Border Security System on Human Trafficking in Bangladesh: The Mediating Effect of the Use of Advanced TechnologyDocument12 pagesThe Impact of Integrated Border Security System on Human Trafficking in Bangladesh: The Mediating Effect of the Use of Advanced TechnologyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Application of Project Management using CPM (Critical Path Method) and Pert (Project Evaluation and Review Technique) in the Nava House Bekasi Cluster Housing Development ProjectDocument12 pagesApplication of Project Management using CPM (Critical Path Method) and Pert (Project Evaluation and Review Technique) in the Nava House Bekasi Cluster Housing Development ProjectInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Quality Control to Reduce Appearance Defects at PT. Musical InstrumentDocument11 pagesQuality Control to Reduce Appearance Defects at PT. Musical InstrumentInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Application of the Economic Order Quantity (EOQ) Method on the Supply of Chemical Materials in the Laboratory of PT. Fajar Surya Wisesa TbkDocument15 pagesApplication of the Economic Order Quantity (EOQ) Method on the Supply of Chemical Materials in the Laboratory of PT. Fajar Surya Wisesa TbkInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Analysis of Carton Packaging Quality Control Using Statistical Quality Control Methods at PT XYZDocument10 pagesAnalysis of Carton Packaging Quality Control Using Statistical Quality Control Methods at PT XYZInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Visitor Perception Related to the Quality of Service in Todo Tourism VillageDocument10 pagesVisitor Perception Related to the Quality of Service in Todo Tourism VillageInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Entrepreneurial Adult Education as a Catalyst for Youth Employability in Disadvantaged AreasDocument9 pagesEntrepreneurial Adult Education as a Catalyst for Youth Employability in Disadvantaged AreasInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A New Model of Rating to Evaluate Start-ups in Emerging Indian MarketDocument7 pagesA New Model of Rating to Evaluate Start-ups in Emerging Indian MarketInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Enhancing Estimating the Charge Level in Electric Vehicles: Leveraging Force Fluctuation and Regenerative Braking DataDocument6 pagesEnhancing Estimating the Charge Level in Electric Vehicles: Leveraging Force Fluctuation and Regenerative Braking DataInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A Proof of Concept Using BLE to Optimize Patients Turnaround Time (PTAT) in Health CareDocument14 pagesA Proof of Concept Using BLE to Optimize Patients Turnaround Time (PTAT) in Health CareInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Health Care - An Android Application Implementation and Analyzing user Experience Using PythonDocument7 pagesHealth Care - An Android Application Implementation and Analyzing user Experience Using PythonInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Gravity Investigations Applied to the Geological Framework Study of the Mambasa Territory in Democratic Republic of CongoDocument9 pagesGravity Investigations Applied to the Geological Framework Study of the Mambasa Territory in Democratic Republic of CongoInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Intrusion Detection System with Ensemble Machine Learning Approaches using VotingClassifierDocument4 pagesIntrusion Detection System with Ensemble Machine Learning Approaches using VotingClassifierInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Crop Monitoring System with Water Moisture Levels Using ControllerDocument8 pagesCrop Monitoring System with Water Moisture Levels Using ControllerInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Naturopathic Approaches to Relieving Constipation: Effective Natural Treatments and TherapiesDocument10 pagesNaturopathic Approaches to Relieving Constipation: Effective Natural Treatments and TherapiesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Developing Digital Fluency in Early Education: Narratives of Elementary School TeachersDocument11 pagesDeveloping Digital Fluency in Early Education: Narratives of Elementary School TeachersInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Synthetic and Natural Vitamin C Modulation of Leaded Paint-Induced Nephrotoxicity of Automobile Painters in Ile-Ife, Nigeria.Document21 pagesSynthetic and Natural Vitamin C Modulation of Leaded Paint-Induced Nephrotoxicity of Automobile Painters in Ile-Ife, Nigeria.International Journal of Innovative Science and Research TechnologyNo ratings yet
- Optimizing Bio-Implant Materials for Femur Bone Replacement:A Multi-Criteria Analysis and Finite Element StudyDocument5 pagesOptimizing Bio-Implant Materials for Femur Bone Replacement:A Multi-Criteria Analysis and Finite Element StudyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A Study to Assess the Effectiveness of Bronchial Hygiene Therapy (BHT) on Clinical Parameters among Mechanically Ventilated Patients in Selected Hospitals at ErodeDocument7 pagesA Study to Assess the Effectiveness of Bronchial Hygiene Therapy (BHT) on Clinical Parameters among Mechanically Ventilated Patients in Selected Hospitals at ErodeInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Year Wise Analysis and Prediction of Gold RatesDocument8 pagesYear Wise Analysis and Prediction of Gold RatesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Government's Role in DMO-based Urban Tourism in Kayutangan area of Malang cityDocument8 pagesThe Government's Role in DMO-based Urban Tourism in Kayutangan area of Malang cityInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Design and Implementation of Software-Defined ReceiverDocument8 pagesDesign and Implementation of Software-Defined ReceiverInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Fahfi/Mochaina Illegal Gambling Activities and its Average Turnover within Limpopo ProvinceDocument8 pagesFahfi/Mochaina Illegal Gambling Activities and its Average Turnover within Limpopo ProvinceInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Inclusive Leadership in the South African Police Service (SAPS)Document26 pagesInclusive Leadership in the South African Police Service (SAPS)International Journal of Innovative Science and Research TechnologyNo ratings yet
- Effectiveness of Organizing Crossing Transport Services in the Maritime Area of Riau Islands ProvinceDocument10 pagesEffectiveness of Organizing Crossing Transport Services in the Maritime Area of Riau Islands ProvinceInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Income Diversification of Rural Households in Bangladesh (2022-23)Document5 pagesIncome Diversification of Rural Households in Bangladesh (2022-23)International Journal of Innovative Science and Research TechnologyNo ratings yet
- BT f5 Bab 6 DLP NniDocument43 pagesBT f5 Bab 6 DLP NniNURUL NADIAH BINTI IDRIS KPM-GuruNo ratings yet
- 0014 020 en 02Document13 pages0014 020 en 02Taufik RachmanNo ratings yet
- Furuno Speed Log DS-80Document40 pagesFuruno Speed Log DS-80psad80No ratings yet
- GA A75M D2H R101 SchematicDocument29 pagesGA A75M D2H R101 SchematicmodohoiNo ratings yet
- Fast Track Troubleshooting: Downloaded From Manuals Search EngineDocument6 pagesFast Track Troubleshooting: Downloaded From Manuals Search EngineIsir isirNo ratings yet
- Ricoh FT 3113-3313-3613 SMDocument295 pagesRicoh FT 3113-3313-3613 SMDragan NedicNo ratings yet
- Viko GPDDocument2 pagesViko GPDvictorharijantoNo ratings yet
- A1800 Meter Installation Instructions PDFDocument12 pagesA1800 Meter Installation Instructions PDFandresNo ratings yet
- Diagnostico Backup Switch 320D GKLDocument11 pagesDiagnostico Backup Switch 320D GKLanton100% (2)
- Mathematical ProblemDocument3 pagesMathematical ProblemMrinmoy Rahman100% (1)
- Oscillator Design and Computer SimulationDocument317 pagesOscillator Design and Computer Simulationwaynecard71No ratings yet
- EYR207Document8 pagesEYR207Gabor KomuvesNo ratings yet
- Handout For Marpow Week 5 6Document13 pagesHandout For Marpow Week 5 6AJ Bacarisas RochaNo ratings yet
- TK 3000 ServiceDocument39 pagesTK 3000 Servicejulio brachoNo ratings yet
- Mitsubishi-Troubleshooting Guide For ProjectorsDocument8 pagesMitsubishi-Troubleshooting Guide For ProjectorsImthiyas AhmedNo ratings yet
- Standard Technical Specifications For Electrical Works: 14 M Height Street Lighting Poles Including AccessoriesDocument11 pagesStandard Technical Specifications For Electrical Works: 14 M Height Street Lighting Poles Including AccessoriesWael AlmassriNo ratings yet
- E560 CMG10 DBDocument5 pagesE560 CMG10 DBHoang NguyenNo ratings yet
- Znshine Installation Manual Light Double Glass Half CutDocument14 pagesZnshine Installation Manual Light Double Glass Half CutJoao FreitasNo ratings yet
- Dr. HENG, Chun Huat Teaching Assistant Dr. BA MyintDocument7 pagesDr. HENG, Chun Huat Teaching Assistant Dr. BA MyintNixNo ratings yet
- Quadxs 2cDocument2 pagesQuadxs 2cMd Mansoor100% (2)
- Introduction To Basic ConceptsDocument19 pagesIntroduction To Basic ConceptsM Hussnain JavedNo ratings yet
- 2013 Coa CMDocument5 pages2013 Coa CMUriti Venkata Naga KishoreNo ratings yet
- TVH Battery Connector & Intercell ConnectorDocument72 pagesTVH Battery Connector & Intercell ConnectorMelwyn FernandesNo ratings yet
- SMCDocument1 pageSMCIsai AnguianoNo ratings yet
- Lab Activity 1: Faraday'S Law: ObjectivesDocument5 pagesLab Activity 1: Faraday'S Law: ObjectivesJim Lester AmodiaNo ratings yet
- Inncom 2018 Catalog Reva 02-18Document51 pagesInncom 2018 Catalog Reva 02-18TrầnTrungHiếuNo ratings yet
- Easypic4 Manual v100Document34 pagesEasypic4 Manual v100Joseph Abraham AC100% (1)